Role of World Models自动驾驶中的世界模型
- 2026-07-23 21:07:24
Role of World Models自动驾驶中的世界模型
1. 引言
背景:自动驾驶面临大视野和动态环境的挑战,DWM通过预测场景演变来应对这些挑战,对安全可靠的自动驾驶至关重要。
研究目的:提供DWM的全面综述,包括其在自动驾驶中的应用、数据集和评估指标,并探讨未来发展方向。
2. 驾驶世界模型(DWM)
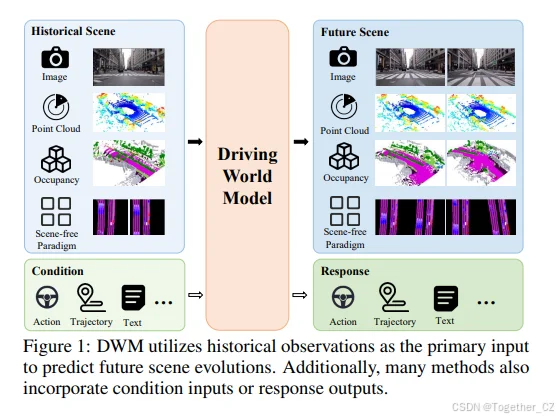
2D场景演变:利用生成技术(如自回归变换器和扩散模型)预测逼真的2D场景演变,重点在于提高场景的保真度、一致性和可控性。
3D场景演变:3D数据(如点云和占据)提供了更精确的空间信息,相关研究集中在提高3D场景预测的效率和质量。
无场景范式:一些方法不直接预测详细场景,而是关注潜在状态或多智能体行为,以提高效率和泛化能力。
3. DWM的应用
模拟:DWM可以作为模拟器,根据输入指令生成多样化的驾驶场景,用于训练和评估驾驶模型。
数据生成:通过合成数据增强数据集,提高数据的多样性和覆盖范围,支持自动驾驶研究。
预期驾驶:通过预测未来场景优化车辆的规划能力,提高在复杂驾驶环境中的安全性和适应性。
4D预训练:利用大量未标记的多模态数据进行预训练,提高下游任务的性能,减少对标注数据的依赖。
4. 评估
数据集:回顾了自动驾驶领域的主要数据集,强调了数据集的规模和多样性。
度量指标:总结了用于评估DWM性能的常见度量指标,如FID、FVD、CD等,并指出了当前评估方法的局限性。
5. 限制和未来工作
数据稀缺:高质量数据的获取成本高,尤其是长尾场景,导致数据集有限且分布不均。
效率问题:生成任务增加了计算成本和延迟,阻碍了实时驾驶应用。
可靠模拟:DWM在复杂模拟和变化驾驶情况下的性能仍需提高,以确保鲁棒性和泛化能力。
统一任务:现有的DWM主要支持预测任务,未来需要整合更多语言任务以提高模型的理解能力。
多传感器建模:自动驾驶系统依赖多传感器数据,未来需要进一步探索多传感器数据的整合。
攻击和防御:对抗性攻击对驾驶安全构成威胁,未来需要研究有效的防御策略。
6. 结论
文章总结了DWM在自动驾驶中的重要作用,并强调了其在模拟、数据生成、预期驾驶和4D预训练中的应用。同时,文章指出了当前研究的局限性,并提出了未来的研究方向,为自动驾驶领域的研究者提供了宝贵的参考。#计算机视觉 #论文 #学术 #深度学习 #多模态人工智能 #科技 #人机交互 #科技与创新 #人工智能未来 #大模型
背景:自动驾驶面临大视野和动态环境的挑战,DWM通过预测场景演变来应对这些挑战,对安全可靠的自动驾驶至关重要。
研究目的:提供DWM的全面综述,包括其在自动驾驶中的应用、数据集和评估指标,并探讨未来发展方向。
2. 驾驶世界模型(DWM)
2D场景演变:利用生成技术(如自回归变换器和扩散模型)预测逼真的2D场景演变,重点在于提高场景的保真度、一致性和可控性。
3D场景演变:3D数据(如点云和占据)提供了更精确的空间信息,相关研究集中在提高3D场景预测的效率和质量。
无场景范式:一些方法不直接预测详细场景,而是关注潜在状态或多智能体行为,以提高效率和泛化能力。
3. DWM的应用
模拟:DWM可以作为模拟器,根据输入指令生成多样化的驾驶场景,用于训练和评估驾驶模型。
数据生成:通过合成数据增强数据集,提高数据的多样性和覆盖范围,支持自动驾驶研究。
预期驾驶:通过预测未来场景优化车辆的规划能力,提高在复杂驾驶环境中的安全性和适应性。
4D预训练:利用大量未标记的多模态数据进行预训练,提高下游任务的性能,减少对标注数据的依赖。
4. 评估
数据集:回顾了自动驾驶领域的主要数据集,强调了数据集的规模和多样性。
度量指标:总结了用于评估DWM性能的常见度量指标,如FID、FVD、CD等,并指出了当前评估方法的局限性。
5. 限制和未来工作
数据稀缺:高质量数据的获取成本高,尤其是长尾场景,导致数据集有限且分布不均。
效率问题:生成任务增加了计算成本和延迟,阻碍了实时驾驶应用。
可靠模拟:DWM在复杂模拟和变化驾驶情况下的性能仍需提高,以确保鲁棒性和泛化能力。
统一任务:现有的DWM主要支持预测任务,未来需要整合更多语言任务以提高模型的理解能力。
多传感器建模:自动驾驶系统依赖多传感器数据,未来需要进一步探索多传感器数据的整合。
攻击和防御:对抗性攻击对驾驶安全构成威胁,未来需要研究有效的防御策略。
6. 结论
文章总结了DWM在自动驾驶中的重要作用,并强调了其在模拟、数据生成、预期驾驶和4D预训练中的应用。同时,文章指出了当前研究的局限性,并提出了未来的研究方向,为自动驾驶领域的研究者提供了宝贵的参考。#计算机视觉 #论文 #学术 #深度学习 #多模态人工智能 #科技 #人机交互 #科技与创新 #人工智能未来 #大模型
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。

