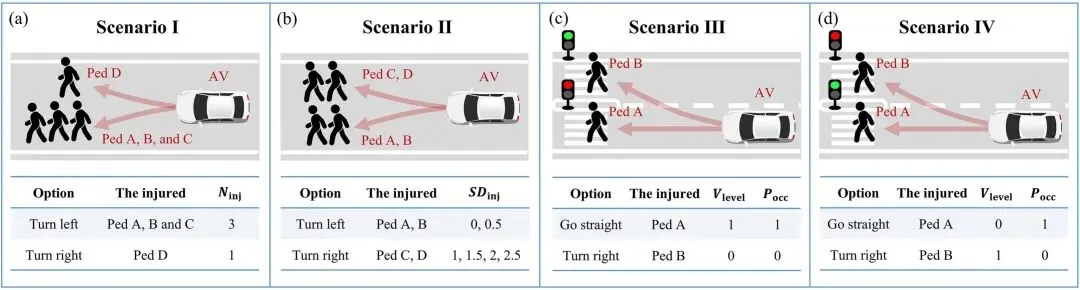
方法部分首先识别并形式化了五种具有广泛社会共识的道德偏好,并分别定义与之对应的道德变量:降低总体伤害对应“量化伤害严重程度” Iq,降低个体伤害对应“受伤人数” Ninj,确保平等关怀对应“伤害严重程度标准差” SDinj,保护守法者对应“违规程度” Vlevel,避免主动伤害对应“路径占用程度” Pocc。随后,作者在中国开展大规模在线调查,通过问卷平台收集公众在四类典型自动驾驶伦理困境场景下的选择结果;图1展示了这些调查场景及其中被控制变化的道德变量,场景设计遵循“单场景仅改变特定变量”的原则,并引入不同等级的 MAIS 伤害量化组合,使受访者在更贴近真实交通风险的条件下作出判断。基于问卷结果,研究用 softmax 形式把公众在两种选项之间的选择概率与代价函数关联起来,从而拟合公众在不同道德偏好之间的权衡方式。
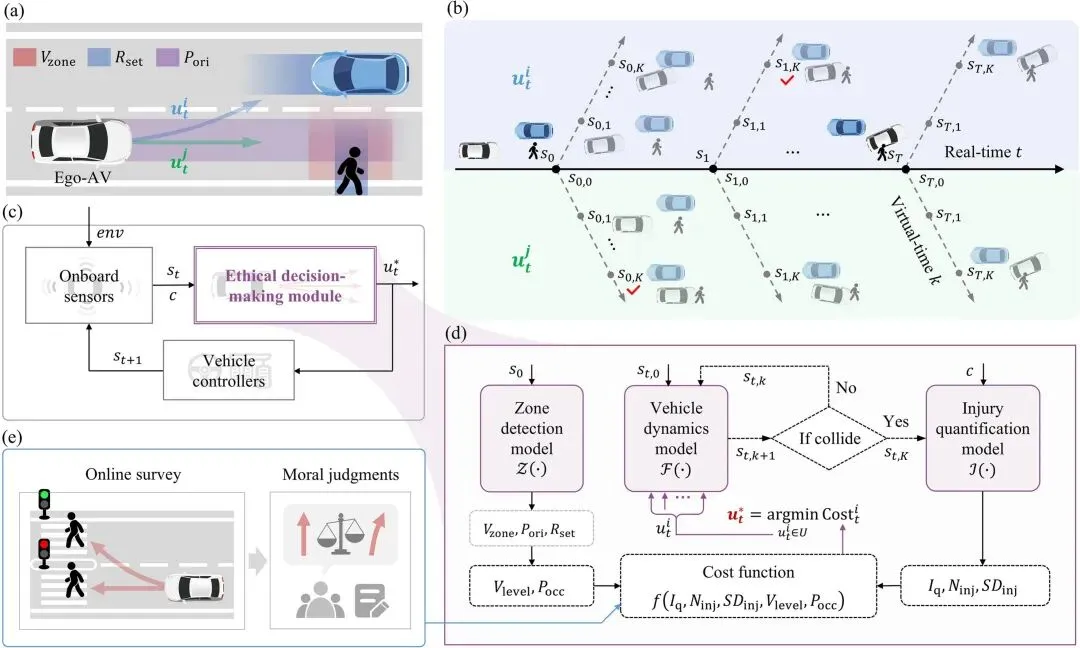
接着,作者构建了完整的伦理决策算法框架,图2展示了其总体流程:当自车进入不可避免碰撞阶段时,算法在虚拟时间域中枚举 25 种由纵向控制和横向控制组成的决策组合,结合区域检测模型、车辆动力学模型和伤害量化模型,预测各候选动作下所有道路使用者的伤害结果,并将前述五个道德变量共同输入代价函数,选出总代价最小的决策在真实时间域中执行。
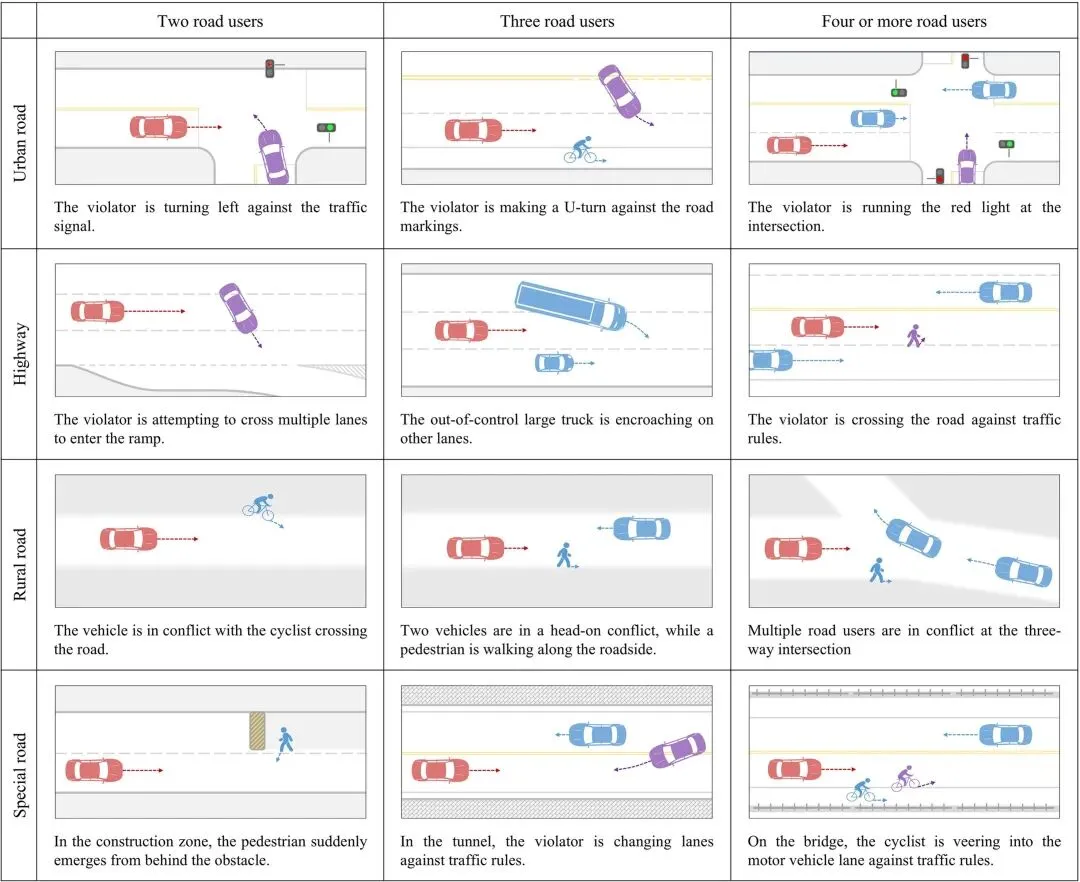
为了验证算法性能,研究参考既有文献中的伦理困境和真实交通条件设计了 60 个基础场景,并在每个基础场景下进一步改变自车横向位置、纵向位置、速度和算法触发时机,形成 4860 个测试场景;图3给出了部分基础场景示意,覆盖城市道路、高速、公路和特殊道路等多种环境。
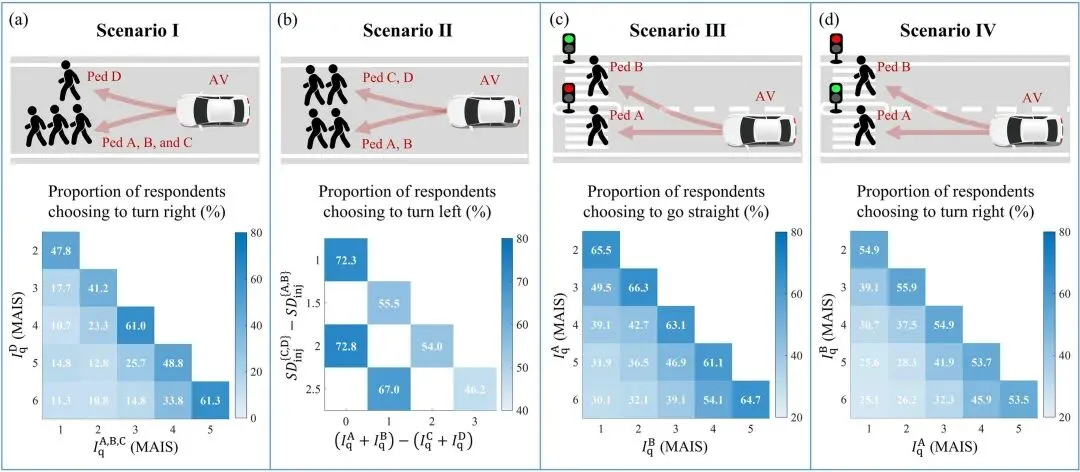
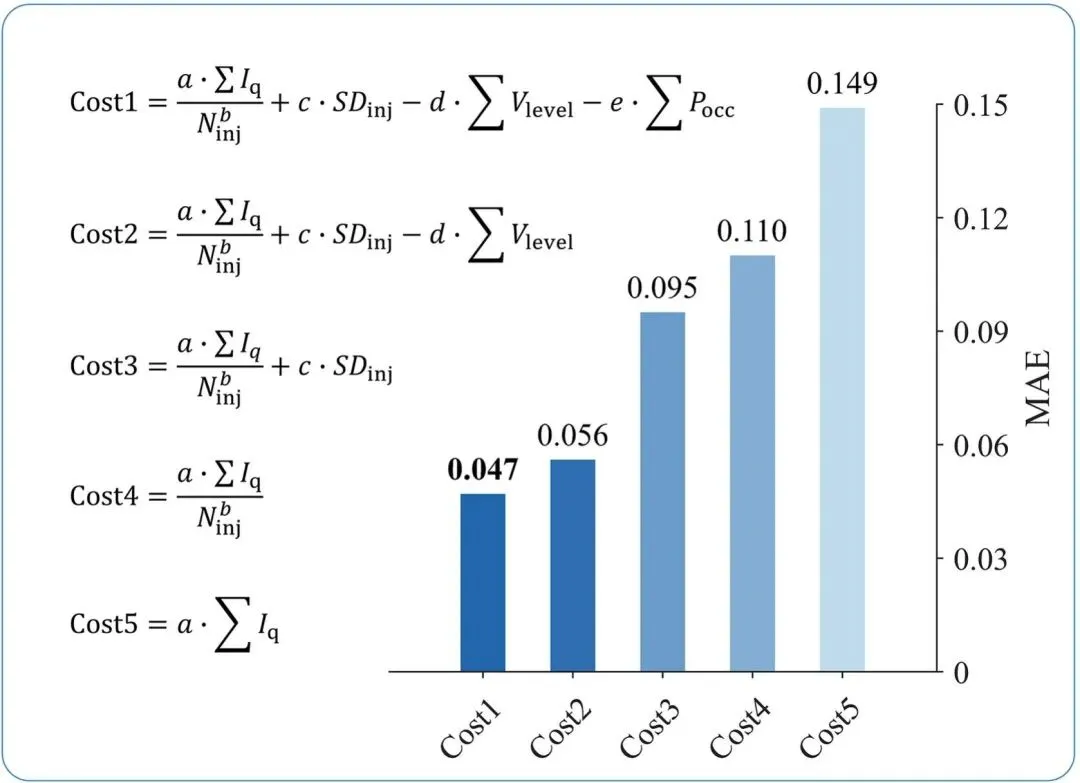
作者首先根据在线调查结果计算了每一道题中受访者选择特定选项的比例,并把这一比例视为真实公众判断的概率分布。图4展示了四类调查场景 15 个问题下的公众选择比例,可以看出,受访者并非机械地遵循某单一原则,而是在伤害严重程度、守法与否以及是否主动偏离原路径之间进行细致权衡。基于这些问卷数据,研究比较了不同形式的代价函数,最终筛选出与调查结果拟合最佳的函数形式,并得到五个权重参数 a = 0.52、b = 0.84、c = 0.44、d = 0.92、e = 0.20,整体拟合误差 MAE 为 0.047。该结果表明,所构建的代价函数能够较好捕捉公众在伦理困境中的真实倾向。
进一步地,图5通过逐一删除某个道德变量的方式检验了五个变量的必要性,结果显示包含全部五个变量的代价函数拟合误差最低,而每去掉一个变量,拟合误差都会明显增大,说明若要使自动驾驶伦理决策真正贴近公众期待,就必须同时纳入“降低总体伤害、降低个体伤害、确保平等关怀、保护守法者、避免主动伤害”这五类道德偏好。
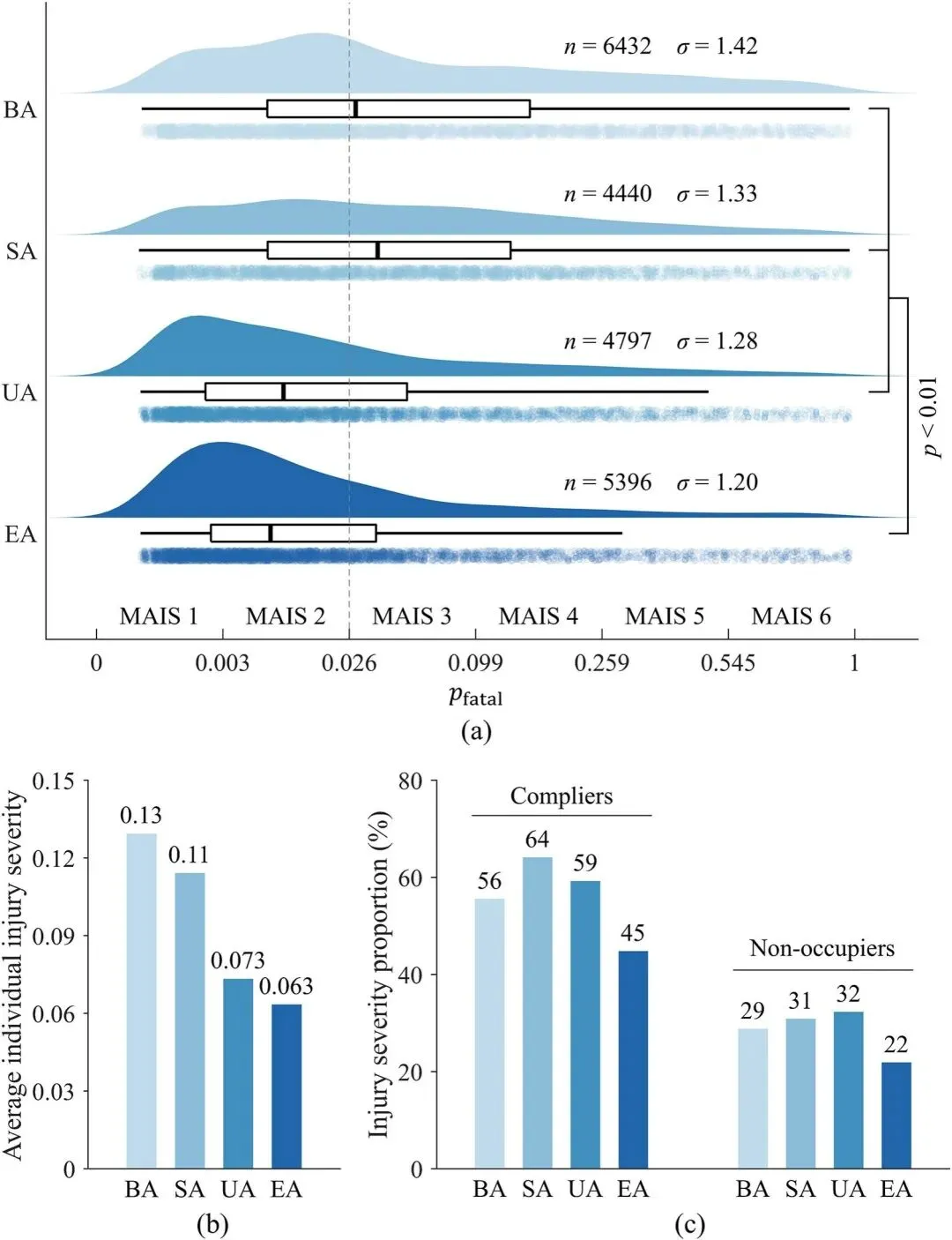
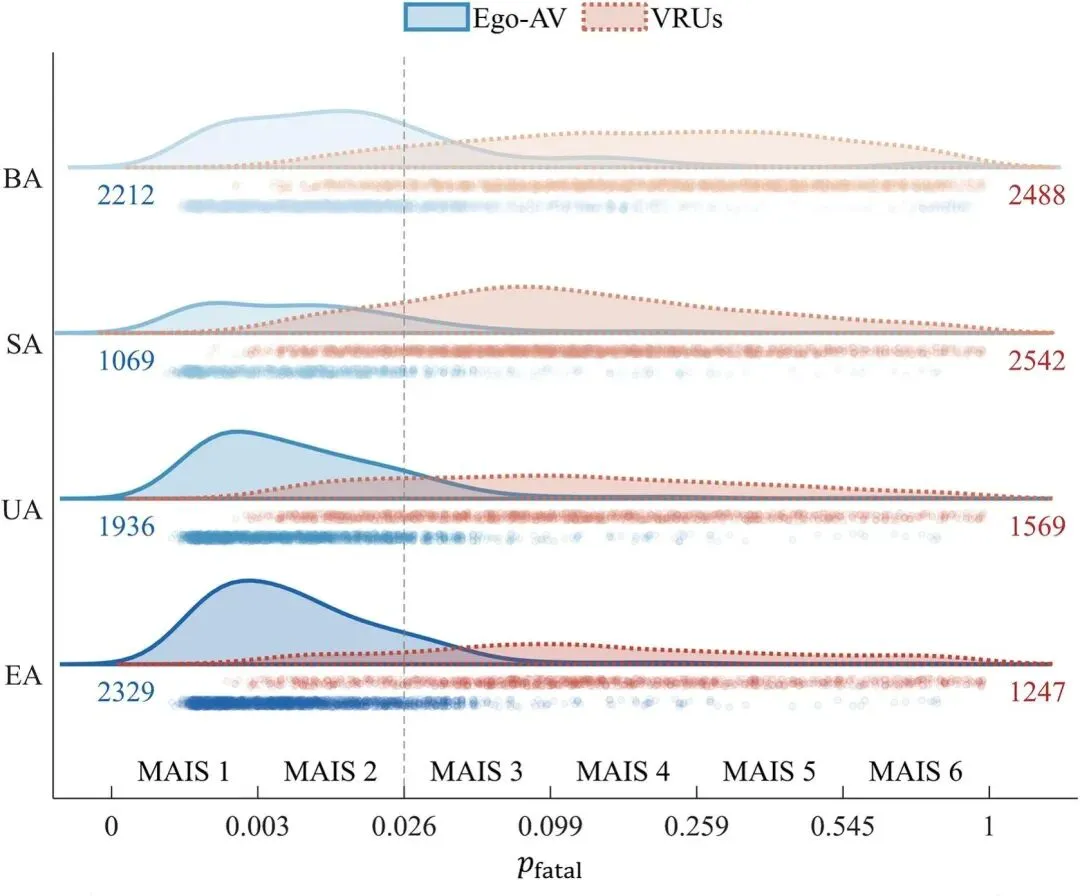
总体统计结果表明,EA 在多项关键指标上均优于对比算法。图6a 显示,EA 在降低个体伤害严重程度方面表现最优,约四分之三的受伤个体被控制在 MAIS 2- 以内;虽然它在受伤人数上的减少幅度不如完全偏向自车或完全偏向总伤害最小化的算法,但仍较 BA 降低了 16%。在“确保平等关怀”方面,EA 的伤害严重程度标准差最小,相比 BA 降低了 15%,表明其最能避免少数个体承受极端不利后果。图6b 进一步表明,EA 的平均个体伤害严重程度最低,较 BA 降低了 52%。图6c 则显示,EA 让守法者和非占路者承担的伤害比例也最低,较 BA 分别降低 20% 和 24%,这意味着它在保护守法道路使用者与避免主动伤害方面最符合公众道德偏好。
图7从对象类型角度补充说明,脆弱道路使用者因缺乏保护通常伤得更重,而 EA 将受伤的脆弱道路使用者数量较 BA 减少了 50%;尽管这会带来自车乘员受伤人数上升的代价,但作者认为其带来的整体伦理收益更大。
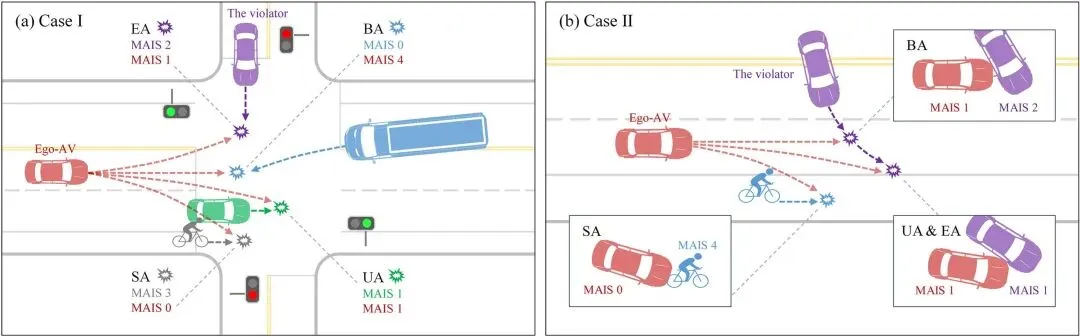
图8给出了两个具有代表性的案例。案例一中,闯红灯的紫色轿车进入路口,一辆大卡车为避让其转入自车车道。BA 仅制动,导致自车与卡车相撞,自车乘员受到严重伤害;SA 为保护自车选择撞向骑行者,使骑行者重伤;UA 选择追尾守法的绿色轿车,以求整体伤害最小,但无辜守法者因此受伤。EA 则选择与违法者发生侧碰,虽然总体伤害比 UA 略高一级,但额外伤害全部由违法者承担,因此更符合公众在图4c、图4d 中体现出来的道德判断,即只有当违法者潜在伤害明显高出守法者至少两个等级时,公众才倾向于放过违法者。案例二中,违法车辆进行逆标线掉头,BA 与 EA 都选择撞向违法者,但 EA 不仅制动,还配合适度转向,使原本较重的侧碰转化为较轻的擦碰;结果自车与违法车辆的 Δv 分别降低了 9.51% 和 9.53%,违法车乘员的伤害从 MAIS 2 降至 MAIS 1。作者还给出了实时性分析:在图8a 所示的五交通参与者复杂场景中,EA 评估单个候选动作约需 1.1 ms,一个完整决策优化周期约 26 ms,说明该方法具备在真实自动驾驶车辆上在线运行的潜力。
本研究最大的意义在于打通了“公众道德调查”和“算法决策框架构建”这两条通常彼此割裂的研究路径,使自动驾驶伦理决策不再只是研究者预设原则的产物,而是建立在真实公众道德判断之上。作者强调,这一框架具有较高的可扩展性:未来既可以根据不同国家、地区或文化背景增删道德偏好,也可以周期性更新问卷数据,使算法持续反映社会道德观念的演变。与此同时,论文也深入讨论了公众在多种道德偏好之间的真实权衡关系。图4c 所示结果说明,当守法者与违法者之间的潜在伤害差距较小时,公众更重视“保护守法者”和“避免主动伤害”;但当某一方潜在伤害显著更高时,“降低总体伤害”又会转而占主导地位,这种动态权衡最终在代价函数中被具体化为多个加权项之间的相互制衡。围绕算法表现,作者认为 EA 虽然在某些场景下会让更多个体受到较轻伤害,而不是让少数个体承担极重伤害,但从公众接受度和整体伦理合理性来看,这种“分散重伤风险”的取向更容易被社会接受。图6 和图8 的结果共同表明,EA 在降低个体伤害、平衡伤害分布、保护守法者和避免主动伤害等方面均优于对比算法。作者还特别强调,本文有意不把年龄、性别、社会地位等个人属性纳入决策依据,以避免潜在歧视和法律争议;即使道路使用者类型在伤害量化阶段会被考虑,最终决策仍不应直接基于身份特征差异。此外,作者也坦承该研究仍有若干局限:例如假设自车能准确识别他人状态与意图、伤害量化模型主要依赖 Δv、以及代价函数采用的是公众平均偏好而无法同时满足所有个体的差异化伦理诉求。未来工作将引入感知与意图识别不确定性、更精细的伤害量化方法,以及能随用户群体演变而动态更新的在线抽样与道德建模机制。










 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
