 TF-35
TF-35萨博35配备有05型自动驾驶仪,该自动驾驶仪与主飞行控制系统协同工作,为飞机提供更优的飞行特性和控制模式。自动驾驶仪与飞行控制系统的原理功能见下图。
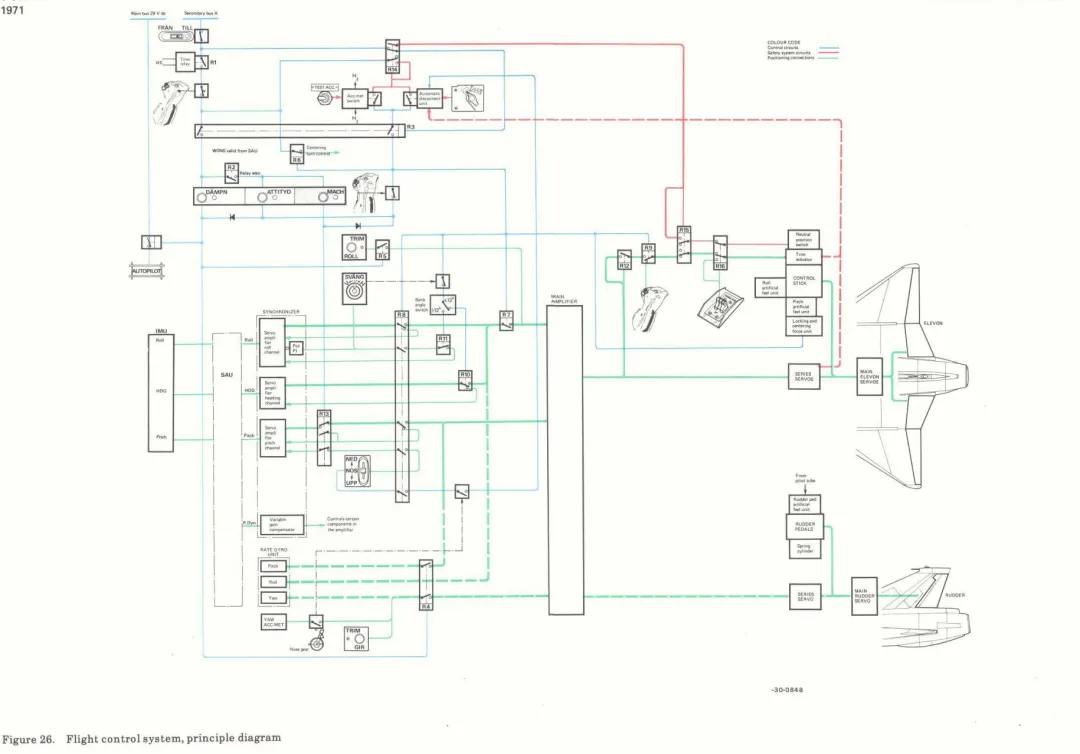 image
image自动驾驶仪具有两种功能模式:
姿态保持模式控制航向、坡度角和俯仰角,阻尼俯仰、横滚和偏航振荡,并保持协调飞行。
阻尼模式控制阻尼俯仰和偏航,并保持协调飞行。
主要部件
自动驾驶仪的主要部件包括:一个同步器、一个速率陀螺组件、一个偏航加速度计、一个主放大器、三个串联伺服作动筒以及一个控制面板(自动驾驶仪的大部分操作控制开关都集中在此)。自动驾驶仪中还包含一个安全系统,由加速度计开关和自动断开装置组成。
同步器在结构和功能上可分为横滚通道、航向通道、俯仰通道以及一个可变增益补偿器通道。
同步器与惯性测量单元(IMU)和大气数据系统交联。横滚、航向和俯仰通道中的伺服放大器从IMU获取关于飞机姿态角的信息,而可变增益补偿器通道中的伺服放大器则从任务计算机(MC)获取基于压力组件信息的动压数据。
速率陀螺组件包含三个速率陀螺——分别对应俯仰、横滚和偏航轴。这些速率陀螺用于感知飞机绕各轴的角速度,在飞机姿态快速变化时(例如由湍流引起)会产生电压,并将该电压供给主放大器。
偏航加速度计感知飞机的横向加速度,并将一个成比例的电压传输至主放大器,从而实现协调飞行。
控制面板包含自动驾驶仪的大部分操作控制开关,见图。
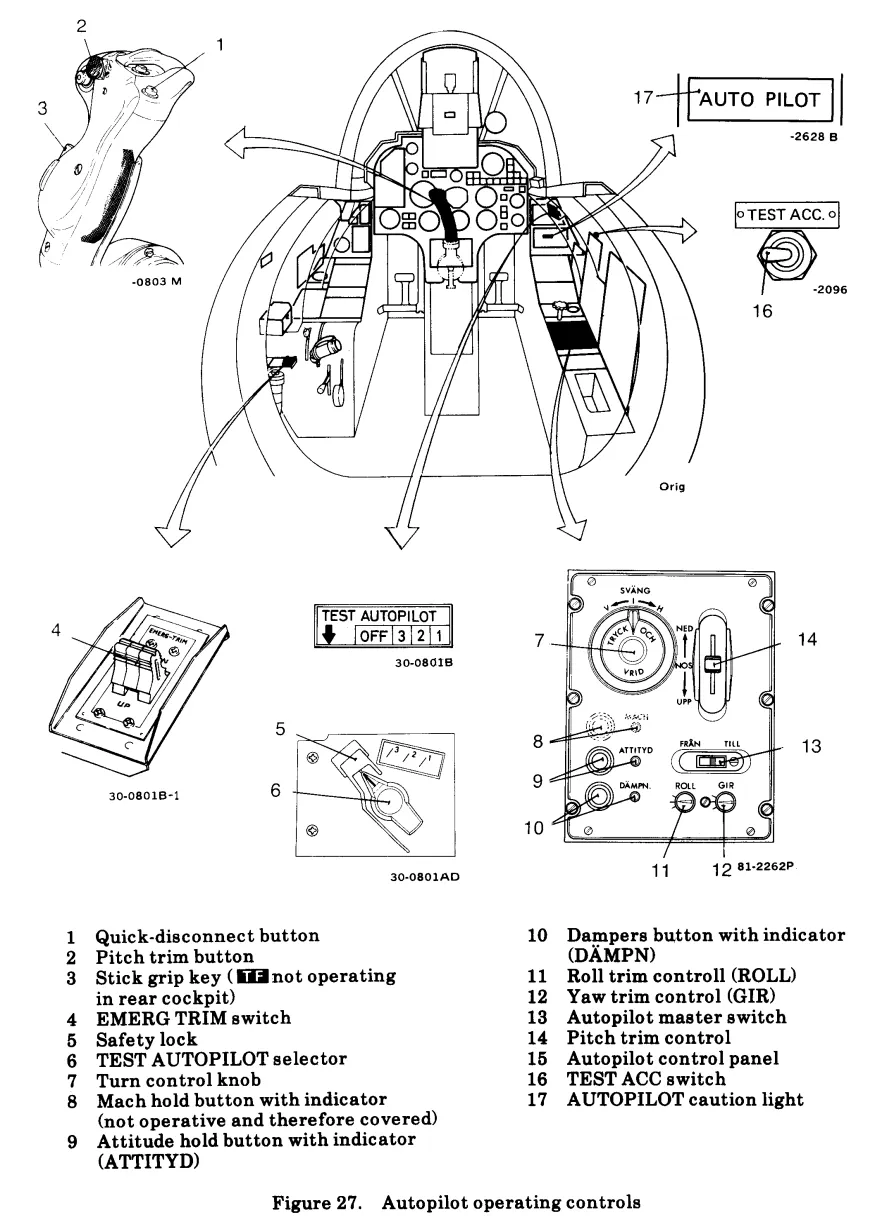 image
image- Quick-disconnect button 快速断开按钮(用于快速解除自动驾驶仪或某些控制)
- Stick grip key (TF not operating in rear cockpit) 操纵杆握把按键(TF 型后座座舱中不工作)
- TEST AUTOPILOT selector 自动驾驶仪测试选择器
- Mach hold button with indicator (not operative and therefore covered) 马赫数保持按钮(带指示灯)(因不工作而被覆盖)
- Attitude hold button with indicator (ATTITYD) 姿态保持按钮(带指示灯)
- Dampers button with indicator (DAMPN) 阻尼器按钮(带指示灯)
- Roll trim control (ROLL) 滚转配平控制
- Yaw trim control (GIR) 偏航配平控制
- Autopilot master switch 自动驾驶仪主开关
- Pitch trim control 俯仰配平控制
- Autopilot control panel 自动驾驶仪控制面板
- TEST ACC switch 测试 ACC 开关(-2096)
- AUTO PILOT caution light 自动驾驶仪警告灯(-2628 B)
主开关用保险丝锁定在“接通”(TILL)位置。如果将其关闭(FRAN),自动驾驶仪的控制电路将断开。
“阻尼”(DÄMPN)和“姿态保持”(ATTITYD)控制按钮为弹簧复位类型。每个按钮均配有一个由柱状销组成的指示灯。已接通的模式由这些指示灯显示。按下其中一个按钮时,相应的指示灯会弹出并发出微弱的白光。另一模式将被断开。
转弯控制旋钮(SVÄNG)是一个带弹簧负载的旋钮,必须先按下才能转动。当姿态保持模式接通时,可使用该旋钮进行转弯。在其他情况下,该旋钮锁定在中立位置。
俯仰配平控制杆(NOS-NED/UPP)是一个弹簧预紧至中立位置的杆,用于在姿态保持模式下调节俯仰角。
横滚(ROLL)和偏航(GIR)旋钮用于配平飞机。(这两个旋钮可用它们之间的一个锁定螺丝锁住。)
主放大器在功能上可分为横滚、俯仰和偏航通道,它接收来自同步器、速率陀螺组件、偏航加速度计以及控制面板的信号。输入信号在主放大器中被转换和叠加,然后输出至串联伺服作动筒,并在某些情况下也输出至配平执行机构(29:2)。
串联伺服作动筒将控制信号传递给主伺服作动筒。它们属于电液类型,由主放大器的信号进行控制。串联伺服作动筒的最大工作范围对应升降副翼偏转角 ±1.35° 和方向舵偏转角 ±3.3°。TF 对应方向舵偏转角 ±2.7°。
接通
自动驾驶仪由交流和直流电源供电。为使自动驾驶仪进入工作状态,自动驾驶仪主开关必须处于接通位,外部交流电源或飞机发电机需向电气系统供电,且应急电源开关处于关闭位。
在时间继电器(R1)通电之前,自动驾驶仪无法接通。 只有在任务计算机(MC)接收到惯性测量单元(IMU)就绪信号后,姿态保持功能才能接通。IMU就绪信号是在其陀螺罗盘对准阶段完成后发出的。
当主电源开关置于接通位时,继电器R3通电。在飞机交流电源启动约90秒后,时间继电器(R1)将会通电。
阻尼模式
当按下“阻尼”(DÄMPN)按钮时,继电器R4和R5通电,这意味着阻尼模式已接通。
在姿态受到快速扰动时,速率陀螺组件中的俯仰速率陀螺和偏航速率陀螺将通过主放大器向串联伺服作动筒发送信号,从而实现对操纵面偏转的阻尼。在此模式下,横滚阻尼不起作用,因为横滚速率陀螺与主放大器之间的信号连接被继电器R7切断。
如果出现横向加速度,偏航串联伺服作动筒将接收到来自偏航加速度计的信号,从而导致方向舵偏转。这样便可抵消由侧滑引起的偏航趋势。然而,这种协调飞行控制功能在起落架放下时会断开。
飞机可使用横滚配平(ROLL)和偏航配平(GIR)控制旋钮进行配平。转动横滚配平旋钮时,信号会被传输至升降副翼串联伺服作动筒,使升降副翼改变位置,以达到所需的配平效果。偏航配平控制的工作方式与之类似。
同步器中的横滚、航向和俯仰通道的伺服放大器将复制来自飞行姿态基准平台的姿态角信息,从而使自动驾驶仪与之保持同步。
姿态保持
自动驾驶仪中包含一个坡度角开关。该开关根据坡度角大于还是小于12°有两个位置。
坡度角 <12° 时接通姿态保持
当按下“姿态保持”(ATTITYD)按钮时,继电器R4、R5、R6、R7、R8、R9和R10通电。此外,安全系统以及锁定与定中力装置也被接通。这原则上意味着飞机的航向、坡度角和俯仰角均由自动驾驶仪监控。
当继电器R8和R10通电时,同步器中横滚、航向和俯仰通道的伺服放大器将不再复制来自飞行姿态基准平台的姿态角信息。取而代之的是,升降副翼串联伺服作动筒将接收那些在姿态改变期间、由上述通道所产生的信号。
例如,在姿态保持接通后,如果俯仰角因某种扰动而变化,升降副翼串联伺服作动筒将接收到一个与该俯仰角变化量相对应的信号。这将导致升降副翼产生偏转,使飞机恢复到接通姿态保持时所具有的俯仰角。因此,同步器俯仰通道中的伺服单元将锁定在飞机接通姿态保持那一刻的俯仰角上。横滚和航向通道中的伺服放大器也将以相应方式工作。
如果在接通的瞬间飞机带有坡度(最大12°),同步器横滚通道中的伺服放大器将从电位计P1接收到一个电压。该电压与坡度角成正比。随后,伺服放大器发出一个信号,该信号通过主放大器供给升降副翼串联伺服作动筒。这将导致升降副翼偏转,从而使飞机改平,自动驾驶仪将使机翼保持水平。
如果飞机偏离了接通瞬间所具有的航向,这将导致升降副翼偏转,使飞机产生坡度并转回其原始航向。尽管自动驾驶仪会尽力保持机翼水平,但通过系统内部的适当平衡,这一功能是可以实现的。
在姿态保持模式下,阻尼模式和偏航加速度计的功能也同样接通。此外,由于横滚速率陀螺与主放大器之间的信号连接是闭合的,横滚阻尼功能也会实现。
同时,陀螺组件和偏航加速度计的工作方式与阻尼模式接通时相同。
文 | 前端那些年
往期文章:
01. F-35简介及美国目标
【关注、点赞、在看】,让钱和爱都流向你。
没有加我微信的朋友可以加我微信terrence386,并备注“围观朋友圈”。如有其他需求,也可随时留言。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
