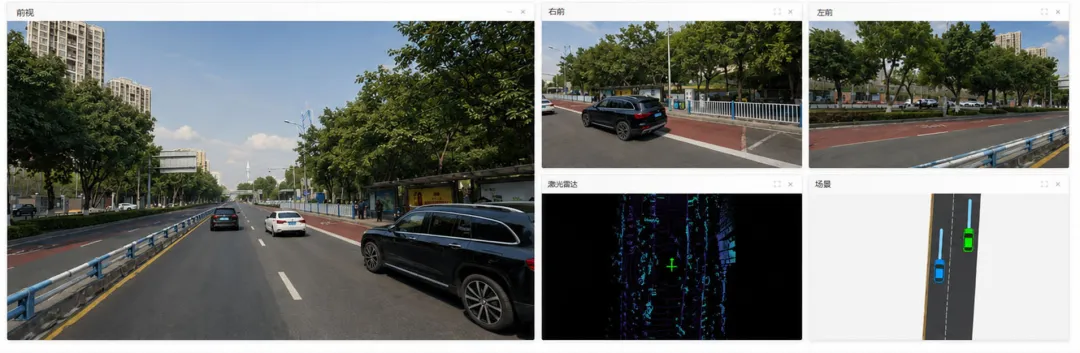
作者 | 李慢慢
编辑 | 李慢慢
出品 | 车路漫漫
2026年自动驾驶的核心痛点是什么?
2026年是高阶自动驾驶规模化商业化的关键之年,随着L3级智驾法规落地、车载世界模型与端到端大模型开始量产应用,行业正式进入模型驱动、高频迭代、合规落地的新阶段。L2+普及下探、L3城区及高速场景开放试点、L4无人业态加速落地,对全场景、高价值训练/测试数据的需求呈爆发式增长。
但传统实车路测模式的固有短板,在2026年量产迭代节奏下被彻底放大,成为智驾安全落地的核心瓶颈:其一,真实道路长尾高危场景数据极度稀缺,极端天气、突发路况、复杂路口等事故高发样本积累周期长、获取难度大,直接导致模型泛化能力不足、边缘场景失效频发;其二,真实数据采集成本高昂,依赖昂贵传感器阵列与专业路测团队,单小时有效数据成本达数万元,效率低下,无法匹配智驾模型周级迭代节奏;其三,行业数据合规监管持续收紧,真实路测含大量隐私与地理敏感信息,全流程存在泄露风险,大幅抬高了企业研发与运营合规成本。传统数据研发范式,已无法适配新时代智驾产业化发展需求。
1、来自仿真的解题思路
实车数据不够,仿真来凑。
自动驾驶仿真,不是一个新名词,从自动驾驶诞生之日开始,仿真就是其伴生物。仿真世界中,可随意仿真车辆动力学、交通参与者行为、天气、光照等,理论来讲可以生成海量的场景,从而挖掘出来各种corner case,测试甚至训练自动驾驶的算法。加速软件迭代,让未来快速到来,仿真技术是带着金钥匙出生的。
但,传统仿真技术的软肋逐渐凸显。
诚如《自动驾驶仿真,扯掉最后一块遮羞布,请直面置信度难题》一文所讲,传统自动驾驶仿真难以进行感知仿真而只能测试规控逻辑。感知仿真难,可以简单理解为各类传感器数据难以有效模拟出来,这导致仿真一直停留在“仅能测试规控”的局面。
备注:传统仿真也不是不能测感知,只是代价很大,需要更精细化的3D建模,更高规格的渲染引擎和显卡,甚至借助各类视频注入的硬件设备等,仿真本就为“降本增效”而生,如此强行仿真反而有些本末倒置了。
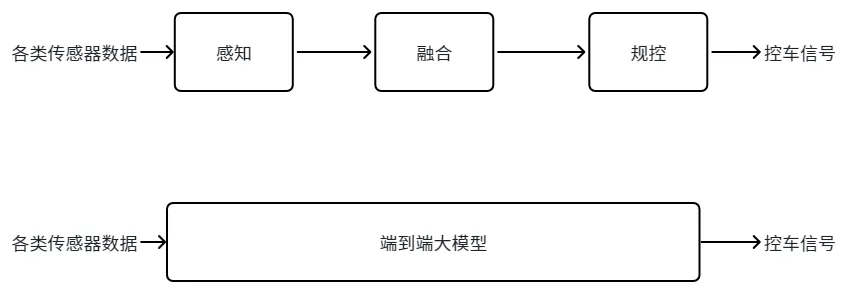
随着一站式端到端的出现,从感知到融合到规控整个被整合到了一个大模型中,已经无法再把局部的“规控”拆出来进行测试,端到端大模型的输入,变成了传感器数据,这一下就戳中了传统仿真“感知仿真难”的软肋。
来自时代新技术的解题思路。
所幸的是,随着技术的进步,涌现出Nerf、3DGS、4DGS、NuRec、世界模型等全新的仿真方式,有人把3DGS和传统仿真进行结合,也有人仅使用世界模型进行闭环仿真,然而今天想为大家介绍的,是一种把3DGS和世界模型进行结合的全新仿真方式,让我们一起来看看他们是怎么做的,以及效果怎样吧。
2、基于世界模型和3DGS的自动驾驶数据合成仿真平台-GRD
在2026年西洽会上,西部智联人工智能中心负责人刘虹葳发布了一款名为GRD的深度融合世界模型与3DGS重建技术的自动驾驶数据合成仿真平台。
GRD(Generate Real Driving)平台的核心破局思路是什么样的呢?
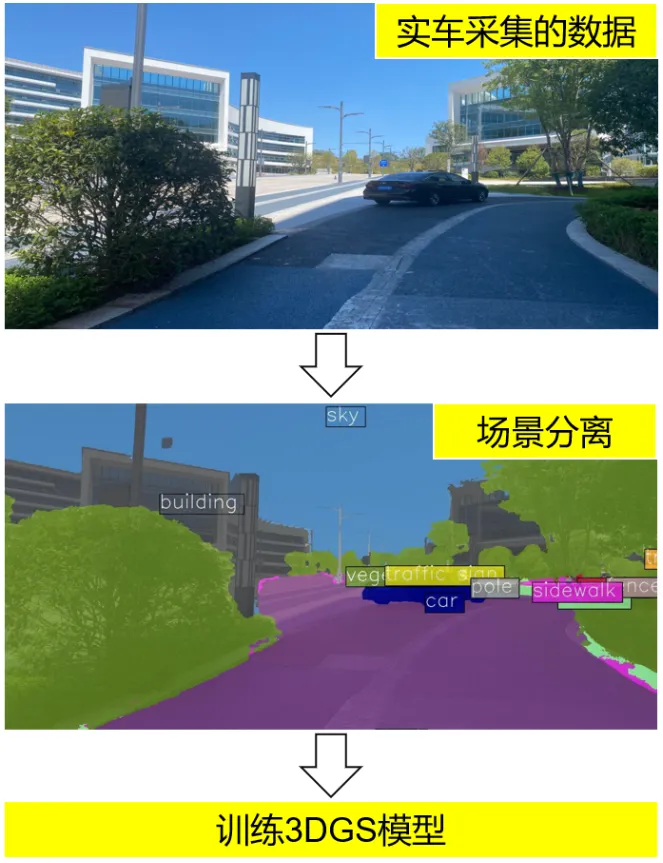
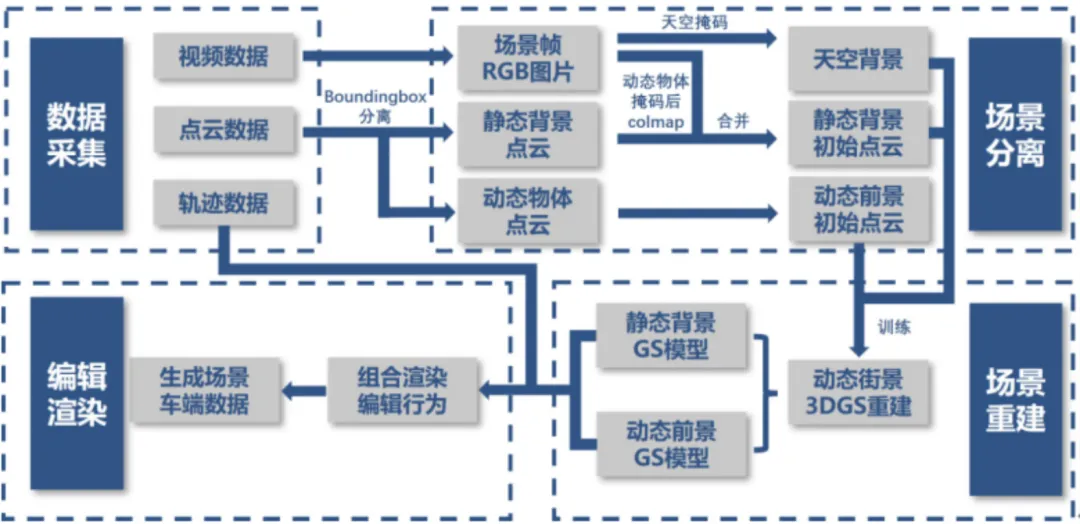
第一步:根据实车采集的数据(视频数据/点云数据/轨迹数据等)进行标准化处理后用来训练3DGS模型。由于实车采集到的数据存在很多遮挡,因此此处也会用到世界模型来补全遮挡信息。
第二步:实车数据先进行动态交通参与者和静态道路的分解,然后分别用于提取动态和静态的3D模型,这一部分是用世界模型来生成的。
第三步:依靠第二步生成的分割的动态3D模型和静态3D模型,以及交通参与者交互行为的泛化算法,可以组合出一系列泛化场景(此处仅作行为的泛化),由3DGS模型进行渲染输出(这里会用到第一步训练出来的3DGS模型),这里能输出各类传感器数据,如摄像头图像、激光点云、IMU数据等。这里主要可用于自动驾驶算法的闭环仿真测试。
第四步:第三步的输出的传感器数据,可以进一步通过世界模型对天气和光照等进行泛化,生成雨天/雪天/夜晚等场景的传感器数据,此数据可以用来训练自动驾驶的算法。
过程比较复杂,可以看看如下的技术原理图。
整体来看,平台具备高保真3D资产(世界模型生成,替代人工建模)、多模态数据一体(视频/点云/惯导同步输出)、实时闭环仿真(低延迟交互,实时状态更新)以及AI交通大模型(自动生成复杂交互的长尾场景)四大核心能力。
3、GRD的核心组件
围绕上述四大核心能力,GRD按数据流转的底层物理逻辑,系统构建三大核心组件。
核心组件一:AI数据处理系统
系统集成AI自动化的数据理解、切片、脱敏、分类管理工具链,自动高效将原始数据转化为高质量的标准化数据。可为客户提供一站式数据管理与后处理服务。
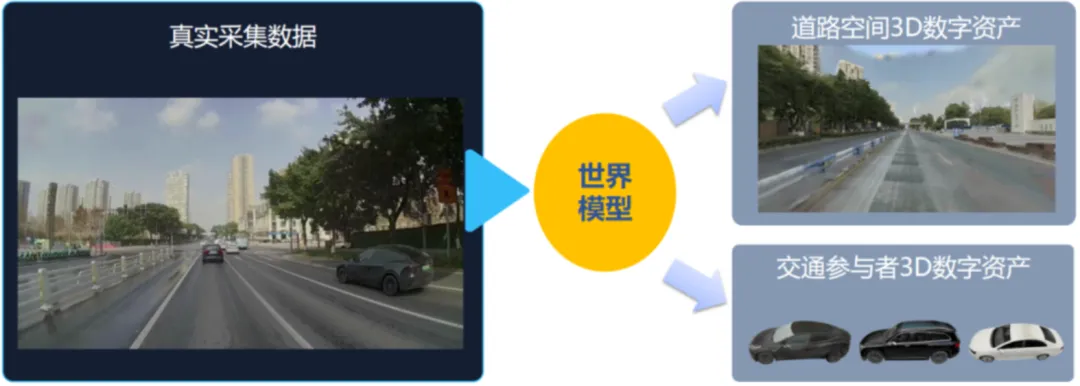
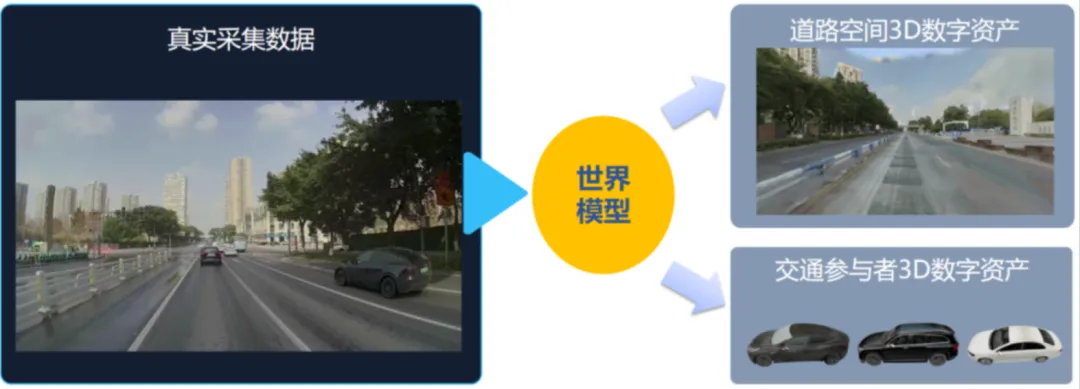
核心组件二:用于3D数字资产生成的世界模型底座
传统人工建模成本高昂且周期漫长。依托自研的世界模型底座与3DGS技术,GRD平台可对车端采集的真实视频进行智能化三维重建,批量生成标准化的3D数字资产,几何与视觉综合保真度超过90%。
这意味着,真实采集数据不再是一次性的训练素材,而是沉淀为企业级、可复用的核心数字资产。
核心组件三:基于世界模型的闭环仿真引擎
在数字资产之上,GRD构建了可交互、可约束的仿真验证体系。该引擎融合了多项关键技术:通过“多模态传感器模型”精准模拟雷达、摄像头、GPS、IMU等多源异构数据的物理特性;通过“交通场景模型”基于大模型驱动生成稀缺的复杂交互场景;通过“物理交互”模块支持精细路面还原。配合场景编辑器、行为泛化模块与仿真控制器,真正实现高置信度的实时闭环仿真。
有了底层的核心能力与组件支撑,GRD平台进一步面向自动驾驶研发全流程释放了更大的应用价值。
对于车企、自动驾驶研发机构和测试验证主体而言,GRD提供的不只是一个单一的数据仿真工具,而是致力于服务客户,共建“数据采集—数据处理—数据合成—场景仿真”的一站式AI数据闭环研发体系。
该体系以世界模型为中枢,打通了算法演进的四大关键环节。
这些丰富的落地案例共同指向一个核心价值:把真实采集中成本极高、难以覆盖的极端天气、特殊视角、复杂道路和长尾交互场景,成功转化为可重复生成、可控测试、可持续迭代的仿真数字资源。
由此,GRD真正完成了从数据到模型、从训练到验证的AI数据闭环体系建设。
4、GRD的优点是什么
作为一个自动驾驶仿真测试工程师,初步了解该平台的功能后,也来说下的一些看法(以下内容仅代表李慢慢本人的意见)。
1、将3DGS和世界模型的优点进行结合。
GRD算是我看到第一个将3DGS和世界模型两个前沿技术进行深度融合的一个能落地的产品了,也确实切中了端到端测试/训练的痛点。在我看来,3DGS的优势是能根据真实数据生成还原度很高的3D模型,然后进行确定性测试(人为可控,对于测试来讲多次测试的一致性非常重要),效率高可大规模测试;世界模型的优势是预测并生成极端场景(物理真实),效率低但可以针对性生成极端场景生成Corner Case制作训练集。测试的时候,3DGS为主世界模型为辅,训练的时候世界模型为主3DGS为辅,两者配合确实是个不错的思路。
2、产品化,易于植入数据闭环平台。部署层面,GRD目前对外发布的是网页版(B/S架构,后期也可根据客户需求制定成“B/S+C/S”架构),这对于已有数据闭环云平台的企业来说,非常利于集成部署,快速增加云平台的数据合成能力。
3、 用AI测试AI、用AI训练AI,越用越好用。智驾系统其实就是个大型的AI系统,现在能对这个AI系统进行训练或者测试的“3DGS+世界模型”的平台其实也是个AI组合,那么长远来讲,是可能打造一个真“数据闭环”的平台的,用AI训练AI,然后用AI测试AI,让系统自己成长;且长远来看,因为世界模型和3DGS本身可训练的基本属性,这套系统会随着数据的不断增加,会越来越好用。未来可期。
5、结尾
GRD平台紧扣2026年智驾数据资产化、高保真仿真、合规化量产的发展趋势,搭建起“多源数据采集回传 --> 自动化数据治理 --> 3DGS三维资产重建 --> 世界模型数据合成应用”的完整闭环链路。通过定制采集车与量产车影子模式高效回传数据,依托自动化工具链完成清洗、脱敏、标注、标准化处理,结合前沿3DGS三维重建与世界模型技术构建高精度仿真场景,实现数据资产封装、安全共享与批量合成,高效产出全覆盖、高保真、合规安全的场景数据,全面支撑高阶智驾算法训练与迭代测试,为自动驾驶规模化、低成本、合规化量产落地提供全新解决方案。
答卷已给,剩下的就是看实际应用落地来打分了,让我们拭目以待吧。
以上,本文完。
如果您也对该平台感兴趣,可联系业务团队,联系方式:18627745981(建议加微信)


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
