Pedestrian crossing strategy while interacting with multipleautonomous vehicles in local street intersections: Effects ofroad infrastructure
多辆自动驾驶车辆交互情境下的行人过街策略:道路基础设施的影响
作者:Duc Trung Luu, Tiju Baby, Jieun Lee, Tatsuru Daimon, Seul Chan Lee
1. 引言
在自动驾驶车辆(Autonomous Vehicles,AVs)逐步进入城市道路的背景下,行人如何在多辆自动驾驶车辆同时交互的复杂环境中选择过街模式,正成为一个现实而紧迫的问题。本研究聚焦支路交叉口场景,基于刺激–有机体–反应(Stimulus-Organism-Response,SOR)理论框架,系统分析了人行道、人行横道与合法路侧停车三类道路基础设施如何通过情境感知(Situation Awareness,SA)与感知风险(Perceived Risk,PR)来影响行人的过街策略选择。研究发现,不同道路基础设施通过差异化的心理作用路径影响行人的过街模式与过街速度,并进一步揭示了多辆AVs交互环境下行人过街模式与速度之间的权衡关系。相关结论为理解真实拥挤道路条件下的行人决策机制,以及优化面向自动驾驶时代的街道设计提供了实证依据。2. 研究内容
本研究采用基于情境实验的数据驱动研究方法,结合虚拟现实实验与偏最小二乘结构方程模型(Partial Least Squares Structural Equation Modeling,PLS-SEM)分析,系统探究多辆AVs交互情境下道路基础设施对行人过街策略的影响。其中,实验设计通过构建包含人行道、人行横道与合法路侧停车的多情景交叉口环境,采集行人在不同刺激条件下的主观感知与决策反应;定量分析则基于SOR理论框架,评估道路基础设施对行人SA、PR及过街策略(过街模式与过街速度)的直接与间接作用关系。
3. 研究方法
3.1 参与者
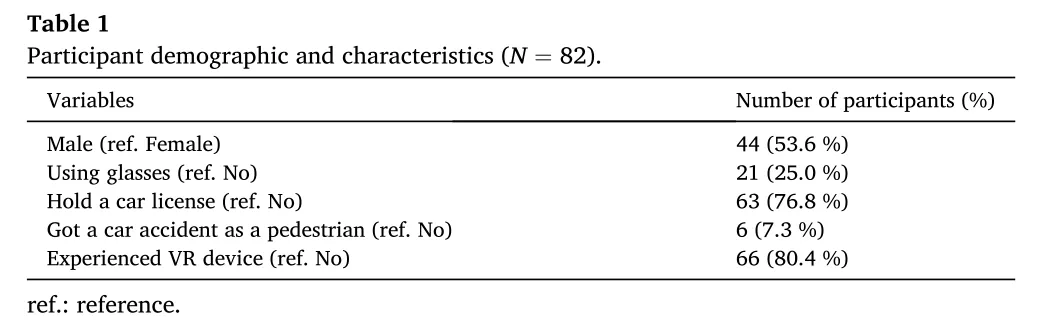
本研究通过高校社交媒体平台招募了82名年轻成年人,未设置特定的纳入或排除标准。参与者年龄范围为18–33岁(平均年龄23.1岁,标准差2.5),其中男性44人、女性38人,如表1所示。
表1 参与者人口统计特征与个体特征(N = 82)
3.2 实验设计
本研究采用2 × 2 × 2的被试内实验设计,以人行道、人行横道与合法路侧停车的“存在 / 不存在”为自变量水平,构建八种交叉口实验情景,如表 2所示,以模拟多辆自动驾驶车辆与行人交互的典型支路交叉口环境。为减弱学习效应与顺序影响,实验通过平衡拉丁方对情景呈现顺序进行随机化与均衡控制。
表2 八种实验情景下过街条件的被试内设计
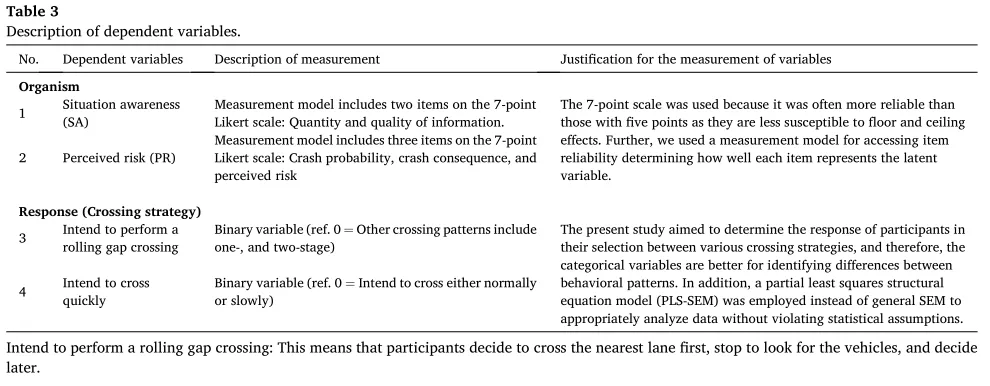
根据SOR概念框架,如图 1所示,将SA与PR设定为有机体变量,将过街模式与过街速度设定为反应变量,其因变量如表 3所示。其中,考虑到滚动间隙过街的高风险特性,将“是否选择滚动间隙过街”与“是否选择快速过街”设定为二元变量,用以分析多辆自动驾驶车辆环境下行人过街模式与过街速度之间的风险补偿与权衡关系。
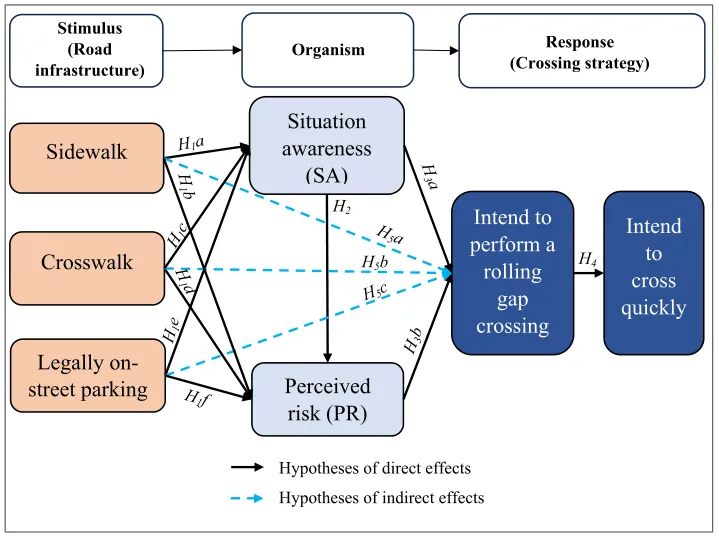
图1 基于 SOR 模型构建的行人过街策略概念框架与研究假设
表3 因变量说明
3.3 实验设备与场景
本研究采用SCANeR软件构建支路交叉口的虚拟仿真环境。在混合居住与商业用地的典型社区场景中,设计了一处宽度为10 m的无信号支路交叉口过街场景(例如四车道道路)。随后,将该仿真环境与SteamVR和VarjoBase平台相结合,并由参与者佩戴Varjo XR-3设备进行实验。
在自动驾驶车辆设置方面,各实验情景中的AV行为由统一的控制策略进行约束。所有AV的行驶速度固定为30 km/h,符合支路道路的一般限速要求;在每个约1 min的实验情景中,设置三个可供行人过街的时间间隙,且每个间隙均大于 5 s。为降低被试内设计可能引入的学习效应,实验控制的是各情景中的时间间隙数量,而非在不同情景中固定其具体出现时刻。
此外,AV采用基于冲突轨迹的主动交互算法,如图 2所示。当行人与AV的运动轨迹不存在冲突时,车辆按照既定路径正常行驶;当检测到潜在冲突时,AV会实时计算其与行人轨迹之间的真实距离,并与制动距离进行比较。在实际距离小于制动距离(4.5 m)时,AV会触发视觉与听觉双重警示信号,以提醒行人注意来车。
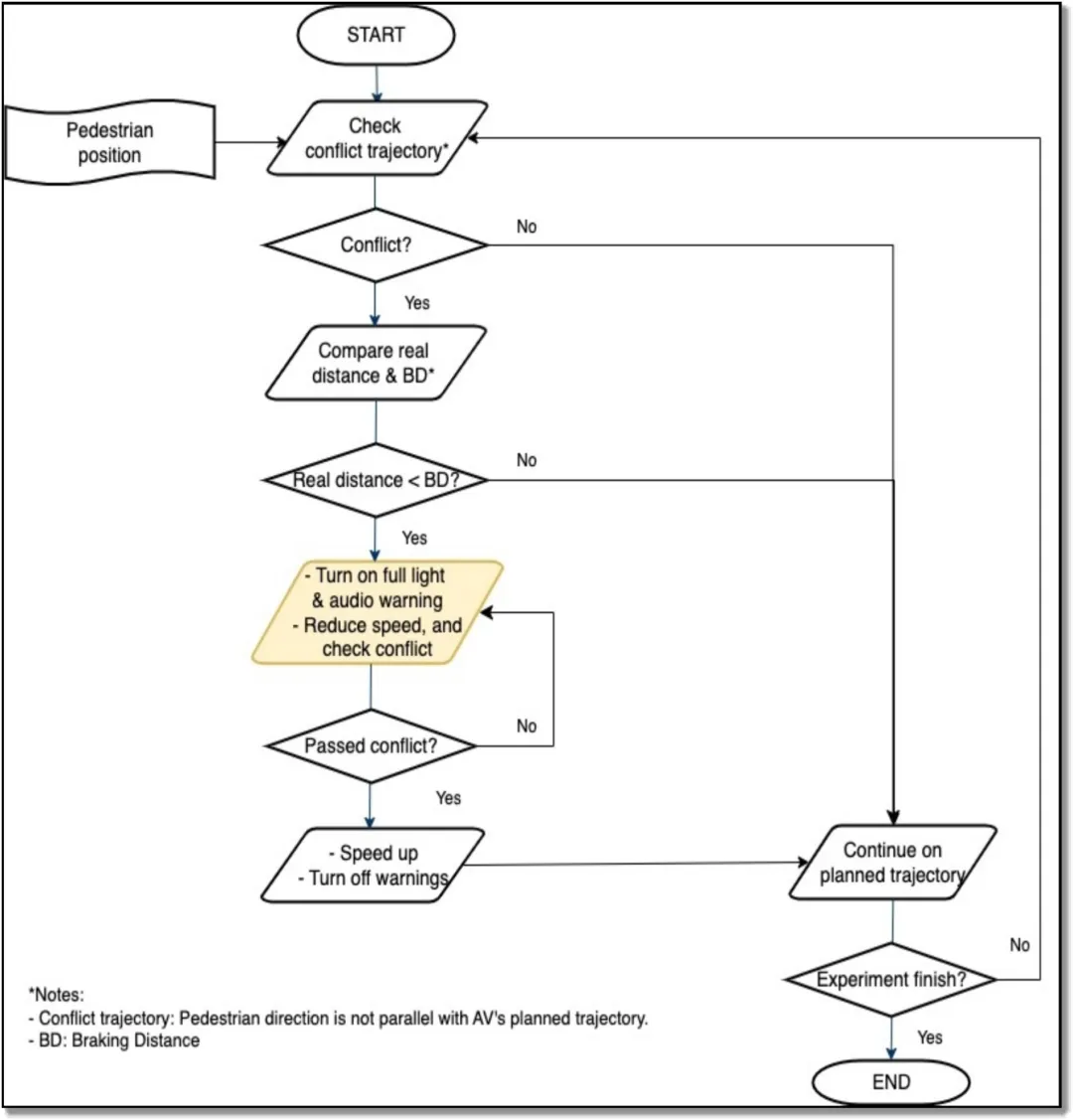
图2 自动驾驶车辆算法流程图
3.4 实验步骤
实验采用情境任务方式,要求参与者在支路交叉口场景中完成“过街购买午餐披萨”的决策任务。当参与者决定过街时,需向前行走约2.5 m以明确表达其过街意图。
在正式实验前,参与者首先填写背景问卷,收集其人口学信息及个体特征,随后进入无时间限制的VR训练阶段,研究人员协助参与者完成头显佩戴与设备校准,并引导其熟悉虚拟道路环境、道路基础设施设置以及AV的视觉与听觉警示信号,确保其充分理解实验任务与操作方式。完成训练后,每位参与者依次经历1个练习情景和8个正式实验情景;在每个情景中,参与者仅需在无时间压力条件下作出一次过街决策,并在情景结束后填写简短问卷,以测量其SA、PR及过街策略。
为保障实验安全性与数据质量,实验允许参与者在任何阶段因不适而随时终止。同时,研究在两个时间点评估参与者的模拟眩晕情况:一次在训练结束后,另一次在完成第四个正式情景后。模拟眩晕问卷包含16个条目,采用0–3级量表进行评分,实验步骤如图3所示。
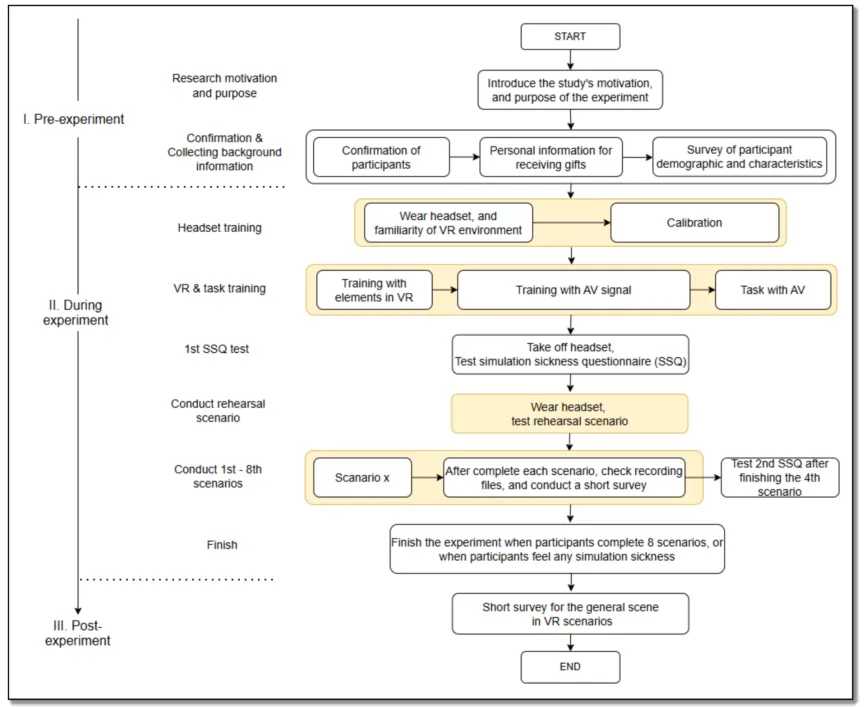
图3 实验步骤
3.5 数据收集及分析
本研究通过情景体验后的主观问卷收集行人在多辆自动驾驶车辆环境下的SA、PR与过街策略数据。SA与PR作为有机体变量,分别由多条量表题项测量;过街策略则通过过街模式与过街速度转化为两个二元变量进行刻画。剔除无效观测后,共获得620条有效数据,并基于SOR框架,采用PLS-SEM方法系统分析道路基础设施对行人过街策略的直接与间接作用机制。
4 分析和结果
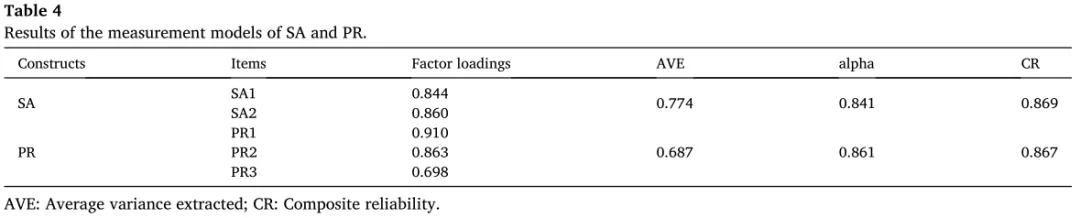
4.1 SA与PR的测量模型
PLS-SEM 测量模型结果如表4所示。SA与PR的测量具有较高的信度与效度:所有因子载荷均大于0.5,平均方差提取量(Average Variance Extracted, AVE)均超过0.5,Cronbac’ sα与复合信度(Composite Reliability, CR) 均高于0.7,验证了良好的聚合效度与内部一致性;同时,所有方差膨胀因子(Variance Inflation Factor, VIF)值低于3.3,排除了多重共线性风险,各潜变量的AVE 平方根均大于其最高相关系数(r ≤ 0.391),表明模型具备稳健的区分效度。
表4 SA与PR测量模型的结果
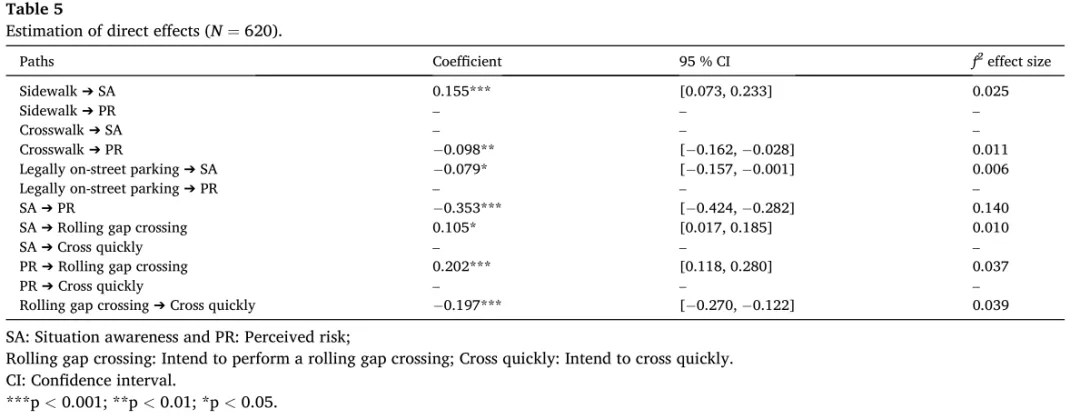
4.2 道路基础设施对行人过街策略的直接与间接影响
结构模型分析结果显示,预测变量之间不存在多重共线性,所有VIF 均低于3,模型估计稳定可靠。在直接效应方面,人行道显著提升行SA(β = 0.155),合法路侧停车显著降低 SA(β = –0.079),而人行横道显著降低PR(β = –0.098)。在有机体与过街策略之间,SA 显著降低 PR(β = –0.353),且SA与PR均显著提高行人选择滚动间隙过街的可能性(β = 0.105 与 0.202);同时,滚动间隙过街与快速过街意向之间存在显著负向权衡关系(β = –0.197),如表5所示。
表5 直接效应估计结果(N = 620)
中介效应分析结果如表6所示,人行横道通过PR对滚动间隙过街产生显著负向间接影响(β = –0.020),人行道则通过SA产生显著正向间接影响(β = 0.016),且上述路径均表现为完全中介效应。模型拟合结果如表7所示,剔除不显著路径后的最终模型在各项拟合指标上均达到推荐标准(TLI、CFI、NFI > 0.9,RMSEA ≤ 0.06),验证了研究假设框架的整体合理性。
表6 间接效应估计结果(N = 620)
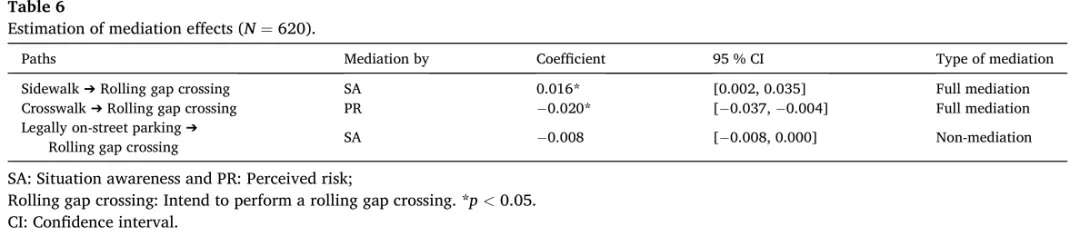
表7 模型设定与拟合指标

4.3 参与者人口学与个体特征对有机体与过街策略的影响差异
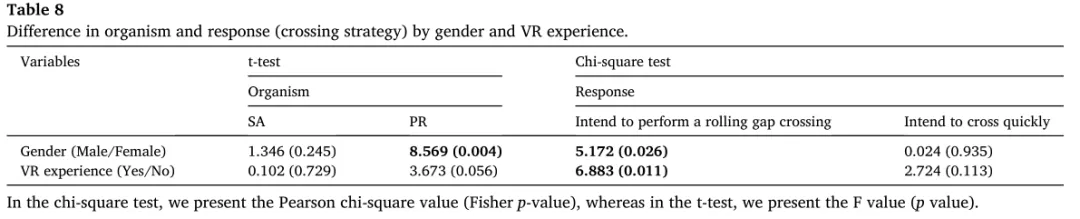
统计检验结果如表8所示,性别在行人PR与滚动间隙过街意向上表现出显著差异,女性的 PR水平显著高于男性,且性别显著影响是否选择滚动间隙过街;但性别对快速过街意向不产生显著影响。同时,性别在 PLS-SEM 中未表现出显著调节效应。相比之下,VR 使用经验对 SA、PR 及大多数过街策略变量均未产生显著影响,仅在滚动间隙过街意向上存在差异。
表8 性别与 VR 使用经验在有机体与过街策略上的差异
5. 结论
研究结果表明,人行道、人行横道与合法路侧停车三类道路基础设施在多辆自动驾驶车辆交互情境下对行人过街策略的差异化影响。人行道通过提升SA增强行人对交通信息的获取能力,从而提高其选择高风险过街模式的可能性;人行横道通过降低PR,使行人更倾向于采用相对保守的过街策略;合法路侧停车虽削弱行人SA,但未对过街策略产生显著影响。相较于既有以“一对一”AV–行人交互为主的研究,本研究引入多辆具备主动交互能力的自动驾驶车辆,显著提升了实验情境的现实性与复杂性。与此同时,研究仍受限于 VR 实验情境、样本年龄结构及实验空间尺度等因素,未来有必要在更真实、更广泛的人群与场景中进一步验证相关结论,以更好地支撑面向自动驾驶时代的行人安全与街道设计决策。
6. 文献出处
Luu, D. T., Baby, T., Lee, J., Daimon, T., & Lee, S. C. (2026). Pedestrian crossing strategy while interacting with multiple autonomous vehicles in local street intersections: Effects of road infrastructure. Transportation Research Part F: Traffic Psychology and Behaviour, 118, 103503.
7. 点评
本研究采用虚拟现实实验与结构方程模型相结合的方法,在多辆自动驾驶车辆交互情境下系统揭示了道路基础设施对行人过街策略的影响机制,研究设计具备较好的内部一致性与理论整合度。然而,研究仍存在若干局限:情境感知与感知风险依赖主观量表测量,难以完全捕捉真实交通环境中的动态认知过程;VR实验环境虽保障了安全性,但参与者的风险判断可能受实验情境与社会期许偏差影响;样本集中于年轻学生群体。未来研究可结合客观认知指标、多样化样本及真实场景验证,以进一步提升研究的外部效度。
注:由于水平有限,翻译中难免存在不准确或错误之处,请以原文为准,并欢迎指正。
知识搬运工(翻译者)丨 苏志强
审核丨 刘军
出品丨 合肥工业大学 运输与安全研究所
版权声明
本文为《合肥工业大学 运输与安全研究所》独家撰写,如需转载,
请注明出处,谢谢!


