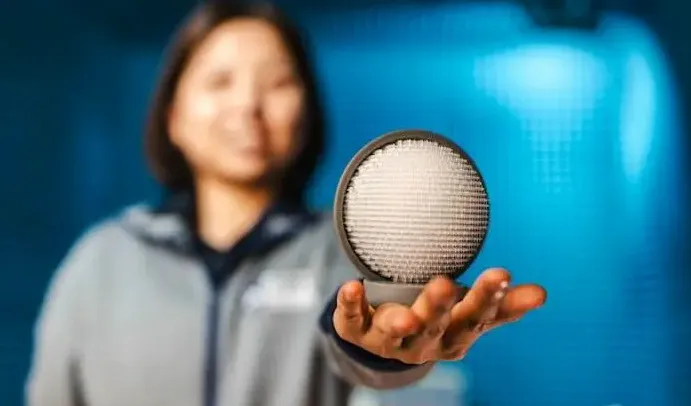
据EurekAlert! AAAS报道,自动驾驶汽车(AV)在道路上的普及程度日益提高,但要确保其安全性,除了提升车辆本身的性能外,还需要升级道路基础设施。EyeDAR是一种低功耗毫米波雷达传感器,大小与橙子相仿,可为配备雷达的自动驾驶汽车提供周围交通的关键信息,从而扩展并提高车辆的感知精度。
这些低调且价格低廉的传感器可安装在路灯和十字路口等关键位置,确保自动驾驶汽车即使在车辆车载传感器的有效探测范围内或能见度极低的情况下,也能及时发现并识别突发障碍物。
领导EyeDAR研究项目的莱斯大学(Rice University)博士后研究员Kun Woo Cho在亚特兰大举行的移动计算系统与应用国际研讨会(HotMobile)上介绍了这项技术。
“目前的汽车传感器系统,例如摄像头和激光雷达,在能见度较差的情况下,例如雨天、雾天或光线昏暗的环境下,性能会受到影响,”在莱斯大学Ernest Dell Butcher工程学教授、电气与计算机工程教授Ashutosh Sabharwal的实验室工作的Cho说道。“而雷达则不同,它在任何天气和光照条件下都能可靠运行,甚至可以穿透障碍物。”
雷达系统会朝特定方向发射信号,当信号遇到障碍物时,一部分会反射回发射源,并携带障碍物信息。然而,只有一小部分雷达信号会被反射回来,大部分信号实际上会远离发射设备。
对于自动驾驶车辆而言,这意味着其传感系统发射的雷达信号中有很大一部分会散射到远离车辆的方向,导致车辆无法获得完整的周围环境信息。从大型车辆后方出现的行人、在十字路口缓慢行驶的车辆或以奇怪角度接近的骑行者都很容易被忽略。
EyeDAR可以安装在交通信号灯、停车标志或路灯等路边基础设施上,从而捕获原本会被忽略的雷达反射信号。该设备独特的结构使其能够确定反射信号的方向,并将信息反馈给自动驾驶车辆。
“这就像为汽车雷达系统增加了一双眼睛,”专门从事超材料天线设计的Cho说道。
EyeDAR拥有简洁优雅的设计,其灵感源自高效的现实世界传感器——人眼。该设备由两个主要部件组成:一个由树脂制成的3D打印Luneberg透镜,其功能类似于人眼晶状体,可将来自任意方向的入射信号聚焦到其背面的一个焦点上;以及环绕透镜后端的天线阵列,其功能类似于视网膜,可检测信号并确定其方向。
传统雷达系统依靠大型天线阵列和复杂的算法来估算角度,而EyeDAR的物理设计则承担了大部分测向所需的计算工作——测向是雷达处理中最耗电耗数据的任务之一。
“我们的透镜由8000多个形状独特、折射率各异的超小型元件组成,”Cho说道。
通过对这些元件的巧妙分布,透镜结构能够以智能的方式与入射雷达信号交互,并将其路由到天线阵列上的正确位置。这种方法已被证明卓有成效:在测试中,EyeDAR的目标方向解析速度比传统雷达设计快200多倍。
此外,EyeDAR无需发射新的信号即可传递其所感知的信息。相反,该传感器交替吸收入射雷达波并将其反射回源雷达,反射后的信号以0和1序列的形式呈现。
Cho表示:“就像闪烁的摩尔斯电码一样。EyeDAR是一款会说话的传感器——它是首个将雷达传感和通信功能集成于单一设计中的案例。”
这种将传感和通信功能结合在紧凑、低成本、低功耗架构中的应用,使得在道路上部署大量传感器成为可能。对于自动驾驶汽车而言,该系统有望在人口密集、交通繁忙的城市环境中发挥尤为重要的作用。然而,其潜在应用范围远不止于此:EyeDAR可以集成到机器人、无人机和可穿戴平台中。这些传感器组成的网络还可以彼此共享信息,使每个设备都能看到远超自身视野范围的情况。
Cho还表示,自己尤其感兴趣的是该系统从计算角度所代表的意义。随着自主系统越来越多地与人直接互动,Cho认为智能物理设计必须与人工智能相辅相成。
Cho还说:“EyeDAR正是我所说的‘模拟计算’的一个例子。过去二十年来,人们一直专注于计算的数字和软件方面,而模拟和硬件方面则相对滞后。我想探索这个被忽视的模拟设计领域。”