自动驾驶场景怎么“说清楚”?OpenScenario 2.0 DSL设计方法论解析
自动驾驶场景的“可声明性”,是贯穿测试、验证、数据挖掘全流程的核心难题——用自然语言描述的场景模糊易歧义,用代码硬编码的场景又难复用、难扩展,而领域特定语言(DSL)正是破解这一难题的方案。
OpenScenario 2.0(简称OSC2.0)作为自动驾驶场景描述的主流DSL,其设计并非单纯的语法堆砌,而是一套精准解决“场景声明问题”的方法论体系。本文从“场景声明”的核心诉求出发,拆解OSC2.0 DSL的设计逻辑,结合实际实践中的数据要求、质量挑战与企业应对方案,补充通用方法论启示与未来发展趋势,完整揭示自动驾驶场景DSL从理论到落地的全链路逻辑。
一、先搞懂:场景声明到底要解决什么问题?
想要用DSL描述自动驾驶场景,首先要明确“声明”的核心诉求——我们不是要写“如何执行场景”(过程式),而是要清晰“场景是什么、有什么约束、要验证什么意图”(声明式)。
场景声明的核心痛点可归纳为3类,这在实际业务中有着极为具体的体现:
1.1 粒度矛盾:精准与通用的两难
既要精准描述具体事故场景(比如“高速上卡车急刹,自车跟车50米”),又要抽象覆盖一类场景(比如“所有高速跟车制动场景”)。这种矛盾直接导致场景描述要么过于繁琐、无法复用,要么过于笼统、无法落地。
1.2 意图缺失:表象与目的的脱节
描述了场景“表象”(车辆位置、速度),却没说清场景“目的”(比如是验证紧急制动,还是评估跟车距离)。这会导致不同角色对场景的理解出现偏差,无法精准服务于测试、训练等核心需求。
1.3 数据脱节:纸上与实际的割裂
声明的场景无法和路测/仿真数据对齐,导致“纸上的场景”和“实际的场景”两张皮,场景声明无法落地到实际的数据挖掘、测试验证中,失去核心价值。
1.4 复杂场景的声明挑战
自动驾驶场景本质上是时序状态的转移序列,包含多实体交互、环境变化、行为联动等复杂要素,传统的规则匹配或者简单描述很难高效处理这类问题:
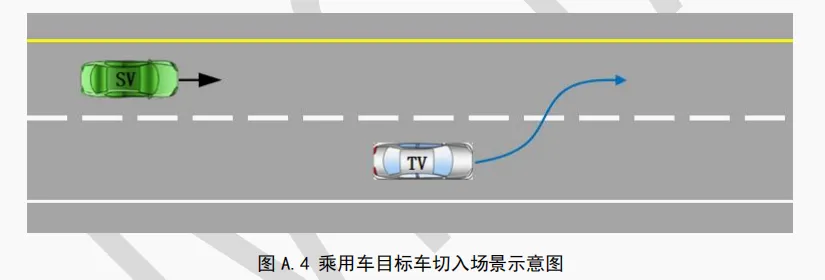
他车变道切入场景:需要描述他车的初始位置、变道触发条件、变道过程、变道后的状态等一系列时序状态;
异常右变道至最右车道停车场景:需要明确无合理变道动机的约束、变道过程、停车动作的完整逻辑;
交叉口通行场景:需要描述多方向车流、信号灯状态、车辆的通行决策等多实体的联动行为。
这些场景的声明需要同时兼顾逻辑的严谨性、表达的简洁性,以及后续的可执行性,这是自然语言或者简单规则无法实现的。
1.5 场景声明的核心需求
基于实际的业务需求,自动驾驶场景声明需要满足以下核心要求:
精准性:能够明确场景的所有细节,避免歧义,让不同角色(产品、算法、工程)对场景的理解保持一致;
可扩展性:能够支持简单场景组合为复杂场景,同时支持新增场景类型、实体类型、行为类型;
可读性:让领域专家能够轻松理解和编写场景描述,无需掌握复杂的编程知识;
可执行性:能够被工具解析,用于场景仿真、数据挖掘、测试验证等实际业务场景;
复用性:能够实现场景要素(实体、行为、约束)的复用,减少重复编写的工作量。
OSC2.0 DSL围绕这些需求,核心是“用结构化的声明式设计,让场景的‘实体-行为-约束-意图’全维度可定义、可验证、可匹配”。
二、OSC2.0 DSL设计方法论:三层核心逻辑解决声明难题
2.1🎯 方法论1:层次化抽象——让场景声明“适配不同粒度需求”
场景声明的第一个核心需求是“分层表达”:面向事故复现要“具体”,面向功能测试要“逻辑”,面向大规模验证要“抽象”。OSC2.0通过四层要素抽象+三层场景架构,构建了“从具体到通用”的声明体系:
1 实体层(Actor Layer):解决 “场景中有什么” 的声明
实体类型抽象:
车辆实体:包括自车(SUT)、其他车辆、紧急车辆等
环境实体:交通标志、信号灯、道路设施等 实体属性抽象:
# 实体属性抽象示例actor_definition:vehicle:types: [passenger_car, truck, bus, emergency_vehicle]attributes:length: 4.5-5.5mwidth: 1.8-2.0mmax_speed: 180kphacceleration: 0-3m/s²
实体层的抽象让用户可以精准声明场景中包含的所有实体,以及实体的属性范围,避免了自然语言描述中 “一辆车” 这种模糊的表达,同时支持实体类型的扩展。
2 行为层(Behavior Layer):解决 “实体做什么” 的声明
行为模式抽象:
交互行为:车辆间交互、车路交互、人车交互等 行为参数化抽象:
# 行为抽象示例behavior_definition:lane_change:direction: [left, right]duration: 2-5sgap_acceptance: 1-3sspeed_change: [-5, +5]kph
行为层的抽象将实体的行为进行了结构化声明,用户可以通过参数约束来明确行为的范围,比如变道的方向、时长、速度变化等,同时支持复合行为的组合,解决了复杂行为的声明问题。
3 场景层(Scenario Layer):解决 “场景的结构和关系” 的声明
场景结构抽象:
场景类型:跟车场景、变道场景、路口场景、行人横穿场景等
场景约束:时间约束、空间约束、行为约束等 场景层的抽象支持用户将多个实体和行为组合为完整的场景,同时通过场景关系的声明,实现复杂场景的组合,比如并行执行的多车变道场景,或者有条件选择的场景分支。
4 意图层(Intent Layer):解决 “场景的目的” 的声明
场景意图抽象:
应用意图:覆盖 ODD、发现边缘场景等 意图层的抽象让用户可以明确场景的使用目的,比如用于测试紧急制动功能,还是用于挖掘边缘场景,让场景声明更贴合业务需求。
2.1.2 三层抽象架构:适配不同业务场景的声明需求
OpenScenario 2.0 DSL 定义了三个层次的场景抽象,分别对应不同的业务场景声明需求:
1 具体场景(Concrete Scenario):精准声明特定场景实例
特点:精确描述特定的场景实例 抽象程度:最低,最接近实际驾驶情况 应用场景:复现特定事故场景、验证具体功能
# 具体场景示例concrete_scenario: "高速公路跟车场景"actors:- ego_vehicle:type: passenger_carposition: [x: 1000m, y: 50m, z: 0m]speed: 100kphlane: 2- lead_vehicle:type: truckposition: [x: 1050m, y: 50m, z: 0m]speed: 80kphlane: 2actions:- lead_vehicle.brake(deceleration: 2m/s²)- ego_vehicle.follow(distance: 50m)
具体场景的声明可以精准复现特定的驾驶场景,用于事故复现、功能验证等需要精确场景的业务。
2 逻辑场景(Logical Scenario):声明场景的逻辑结构
特点:描述场景的逻辑结构和关系 抽象程度:中等,关注场景的逻辑关系 应用场景:功能测试、场景组合
# 逻辑场景示例logical_scenario: "跟车制动场景"actors:- ego_vehicle: vehicle- lead_vehicle: vehicleconditions:- ego_vehicle.following(lead_vehicle)- lead_vehicle.speed < ego_vehicle.speedactions:- lead_vehicle.brake()- ego_vehicle.maintain_safe_distance()
逻辑场景的声明专注于场景的逻辑关系,不指定具体的实体参数,用于功能测试的场景模板,支持参数化生成多个具体场景。
3 抽象场景(Abstract Scenario):声明场景的约束和意图
特点:以约束和意图为核心的高层次描述 抽象程度:最高,关注场景意图和本质特征 应用场景:大规模测试、边缘场景发现
# 抽象场景示例abstract_scenario: "跟车场景"constraints:- ego_vehicle:type: [passenger_car, SUV]speed: 60-120kph- lead_vehicle:type: [passenger_car, truck, bus]speed: 40-100kphdistance: 20-100m- environment:road_type: highwayweather: [clear, rainy]time_of_day: [daytime, twilight]intents:- test_following_distance_control- evaluate_emergency_braking
抽象场景的声明通过约束和意图来定义场景的范围,用于大规模测试的场景生成,或者边缘场景的挖掘,能够覆盖更多的场景变体。
声明层级 | 声明核心 | 解决的痛点 | 声明示例(简化版) |
具体场景 | 声明“特定实例”(精准到位置/速度) | 复现事故场景、验证具体功能 | concrete_scenario: 高速跟车actors: 自车(x:1000m,速度100kph)、卡车(x:1050m,速度80kph)actions: 卡车制动(2ms²)、自车跟车(50m)
|
逻辑场景 | 声明“逻辑关系”(不绑定具体参数) | 功能测试、场景组合 | logical_scenario: 跟车制动conditions: 自车跟随前车、前车速度<自车速度actions: 前车制动、自车保持安全距离
|
抽象场景 | 声明“约束+意图”(最高层泛化) | 大规模测试、边缘场景发现 | abstract_scenario: 跟车场景constraints: 自车速度60-120kph、前车类型[轿车卡车]、道路[高速]intents: 测试跟车距离控制、评估紧急制动
|
2.2🎯 方法论2:声明式语法——让场景声明“意图优先,约束显式”
DSL设计的核心是“语法服务于声明目标”,OSC2.0放弃了过程式编程的“步骤导向”,采用意图驱动、约束显式的声明式语法,让场景声明“说人话、可理解、可校验”。
1. 语法设计的核心原则:只声明“要什么”,不声明“怎么做”
对比两种表述就能看出差异:
过程式(伪代码):for i in 0 to 5: 自车速度 += 1; 检查与前车距离;(关注步骤)
声明式(OSC2.0):sut.vehicle.drive() with: speed(target:100kph)、lane(keep:current)(关注目标)
2. 核心语法的声明逻辑:把约束“写进语法里”
OSC2.0为场景声明的核心维度提供了丰富的约束语法来表达抽象模型中的约束关系,解决场景声明中的边界问题,确保约束可显式声明:
空间约束声明:直接声明实体间的空间关系,比如distance_between(自车, 前车, min:10m, max:50m, along:行驶方向),无需计算坐标;
时间约束声明:声明行为的时间边界,比如duration(前车制动(), min:2s, max:5s),无需写定时器;
组合场景声明:声明场景的逻辑关系,比如parallel(overlap: equal): 自车沿r1行驶、其他车辆沿r2行驶,无需处理多线程逻辑。
这种语法设计让场景声明的核心(约束、意图)成为“一等公民”,领域专家(测试工程师、算法工程师)无需懂编程,就能直接声明场景,解决了“技术语言和业务语言脱节”的问题。
2.3🎯 方法论3:模式化匹配——让场景声明“能从数据中被识别”
场景声明的最终价值是“落地”:不仅要能写出来,还要能从路测/仿真数据中“找出来”。OSC2.0 DSL的第三个设计方法论,是将声明式结构和数据抽取/匹配深度绑定,让“声明的场景”和“实际的场景”可对齐。
1. 声明式匹配规则:用DSL声明“要匹配什么场景”
OSC2.0把场景匹配规则也设计为声明式,比如想要抽取“切入场景”,只需声明匹配模式:
match: cut_in_scenario: lead_vehicle: sut.lead_vehicle( min_distance_from_sut_in_time_units: 0s, max_distance_from_sut_in_time_units: 5s ) lane_change: vehicle.change_lane( from: adjacent_lane, to: sut_lane ) constraints: - lead_vehicle.speed > sut.speed - lane_change.duration < 3s output: - time_stamp - relative_speed - distance_at_merge
这段声明不涉及任何匹配算法的细节,只定义“切入场景的特征约束”,底层算法会根据声明的规则去数据中匹配,实现“声明即规则”。
2. 端到端的数据抽取流程:声明贯穿全环节
从路测数据中抽取场景的全流程,都是基于OSC2.0的声明式设计:
预处理:声明数据格式(rosbag)、要解析的话题(/perception/objects);
实体识别:声明识别规则(车辆检测阈值0.8、行人跟踪阈值0.4);
行为分析:声明行为判定标准(制动减速度≥2m/s²才算制动行为);
场景匹配:声明要匹配的场景类型(加塞/变道/紧急制动)和置信度阈值。
最终输出的匹配结果,也会按照OSC2.0的声明格式组织,确保“抽取的场景”和“设计的场景”语法一致,解决了数据和场景声明“两张皮”的问题。
3. 实际应用案例
从路测数据中抽取场景
# 路测数据抽取配置data_extraction:input:type: rosbagtopics:- /perception/objects- /localization/pose- /control/commandoutput:type: openscenarioformat: 2.0include_metadata: truematching:scenarios: [cut_in, lane_change, emergency_braking]confidence_threshold: 0.7
从路测数据中抽取符合 DSL 声明的场景,用于场景库的构建和边缘场景的挖掘。
场景匹配结果
# 场景匹配结果示例matched_scenarios:- type: cut_instart_time: 12345.6send_time: 12350.2sconfidence: 0.92parameters:- lead_vehicle_id: 123- initial_distance: 35m- merge_distance: 15m- relative_speed: 10kphmetadata:- weather: clear- time_of_day: daytime- road_type: highway
场景匹配结果以 DSL 的格式输出,方便后续的场景分析和复用。
三、DSL实践落地:数据要求与企业应对方案
理论层面的DSL设计需要落地到实际业务中,而数据质量和格式规范是DSL发挥作用的基础。在实际实践中,企业会面临数据格式不统一、感知不稳定等挑战,需要针对性的解决方案。
1. OSC2.0 DSL的输入数据格式要求
OpenScenario 2.0 DSL需要输入数据符合特定的格式规范,其求解器依赖于预定义的实体、行为、约束的结构化格式来工作:
实体数据格式:车辆、行人、环境实体(交通标志、信号灯、道路设施等)都需要遵照OSC2.0规定的字段定义,比如车辆实体需要包含类型、位置、速度、车道等字段,环境实体需要包含类型、位置、状态等字段,这样求解器才能识别这些实体的属性和关系。
行为数据格式:实体的行为(加速、减速、变道等)需要按照OSC2.0的语法定义,包含行为类型、参数、约束等信息,比如变道行为需要包含方向、时长、速度变化等参数。
约束数据格式:场景的空间、时间、行为约束需要按照OSC2.0的约束语法来描述,比如空间约束需要包含实体关系、距离范围、方向等信息。
只有输入数据符合这些格式要求,DSL求解器才能正确解析数据,进行场景匹配和挖掘。
2. 实际实践中的数据质量挑战
正如实际业务中遇到的问题,数据质量会直接影响DSL的场景挖掘效果:
实体感知的不稳定性:车辆和行人的丢帧、遮挡会导致实体识别不完整,比如车辆被遮挡时,感知系统无法获取其完整的运动轨迹,会导致行为分析错误,进而影响场景匹配。
环境感知的不准确性:在线感知出的交通标志、建图信息、信号灯等数据不稳定,比如信号灯状态识别错误、交通标志位置偏差,会导致场景约束判断错误,无法正确匹配场景。
数据格式不一致:多传感器数据、多数据源的数据格式不一致,比如不同传感器的时间戳格式不同、位置坐标系统不同,会导致数据同步和融合困难,影响DSL的解析。
3. 企业因地制宜的实践方案
企业在实际应用中,不需要完全照搬OSC2.0的复杂规范,而是可以根据自身的业务场景、数据现状和技术栈,设计适配的DSL方案:
3.1 轻量化定制:适配自身数据能力
企业可以根据自身的感知能力和数据特点,设计轻量化的DSL,只定义业务需要的实体、行为和约束:
案例:某造车新势力自定义的驾驶模式DSL,仅定义与驾驶模式相关的参数,比如油门响应、能量回收、座舱温度等,无需复杂的场景定义:
define EcoPlusMode {throttle_response = 0.7regen_braking = auto_adjust(route.gradient)cabin_temp = neural_comfort_model(occupants)}.setWeather(RAIN,...
3.2 模块化集成:适配现有技术栈
采用模块化的DSL设计,将DSL集成到现有自动驾驶框架中,不改动现有模块,仅添加DSL的解析和接口模块:
案例:μDrive DSL的设计,集成到Apollo自动驾驶框架中,仅新增Language和Interface两个模块,保持原有Routing、Perception、Planning、Control模块不变,通过信号传输实现DSL的解析和执行,适配现有技术栈。
3.3 场景化扩展:适配特定业务场景
针对自身的业务场景,扩展DSL的实体和约束,比如针对山区弱通信环境的超车系统,添加适合山区场景的约束,比如弯道曲率、坡度等参数,提升DSL的场景适配能力。
4. 企业保证输入数据质量的实践方法
针对感知数据的质量问题,企业可以通过以下方法提升数据质量,保障DSL的正常工作:
4.1 数据采集阶段:规范数据源准入
制定《数据源接入规范》,明确数据格式、字段定义、更新频率、质量指标,比如要求感知数据的完整性≥99.9%,格式统一为JSON/Protobuf,位置坐标统一为WGS84坐标系,从源头保证数据的规范性。
4.2 数据预处理阶段:标准化与清洗
格式标准化:在采集入口增加“标准化适配器”,统一多源数据的格式,比如将不同传感器的时间戳统一为ISO 8601格式,将不同坐标系的位置数据转换为统一坐标系。
缺失值处理:针对丢帧、遮挡导致的缺失数据,采用均值填充、最近值填充、插值法等方法修复,比如使用相邻帧的位置数据插值填充被遮挡的车辆位置。
异常值处理:基于统计学方法(箱线图、Z-score)或业务规则,识别并处理异常数据,比如将信号灯状态的异常跳变数据标记为无效,使用历史数据进行修正。
4.3 数据质量监控:全流程管控
建立数据质量管理平台,对数据质量进行全流程监控:
定义数据质量检测规则,比如检查实体数据的完整性、行为数据的合理性、约束数据的一致性。
定期生成质量检查报告,包括明细报告和趋势报告,及时发现数据质量问题,比如某类传感器的感知准确率下降,及时进行传感器校准或算法优化。
4.4 数据补偿:多源数据融合
针对感知不稳定的问题,采用多源数据融合的方法进行数据补偿:
比如将激光雷达和视觉数据融合,弥补单传感器的感知不足,比如激光雷达可以准确获取车辆的位置和速度,视觉数据可以识别车辆的类型和行为,融合后提升实体识别的准确性。
案例:CodeBuddy框架中的动态数据补偿引擎,通过多传感器融合和数字孪生技术,补偿弱通信环境下的感知数据缺失,提升山区场景下的超车系统的可靠性。
四、从OSC2.0看:自动驾驶场景DSL设计的通用方法论
OSC2.0 DSL的设计,本质是抓住了“场景声明”的核心矛盾,提炼出一套可复用的设计方法论,对所有自动驾驶场景DSL设计都有启示:
1. 声明优先:先明确“场景是什么”,再考虑“怎么用”
DSL设计的起点不是语法炫技,而是先梳理清楚场景需要声明哪些维度(实体/行为/约束/意图),再为每个维度设计极简的声明范式,避免过度设计。
2. 分层抽象:用抽象层级适配不同声明需求
没有“万能的场景声明粒度”,必须设计从“具体实例”到“抽象约束”的分层架构,让同一套DSL既能满足精准复现,又能支撑大规模测试。
3. 闭环设计:声明要能“写出来、匹配上、用起来”
场景声明不是“一次性的文档”,而是要贯穿“设计-生成-测试-数据抽取”全流程。DSL设计时必须考虑:声明的场景能否自动化生成?能否从实际数据中匹配?能否直接用于仿真测试?
4. 实践适配:从理论到落地的灵活调整
企业在应用DSL时,不需要完全遵循标准规范,而是要根据自身的数据能力、技术栈和业务场景,进行轻量化定制和模块化集成,同时建立完善的数据质量管控体系,让DSL真正落地发挥作用。
五、未来发展趋势
自动驾驶场景DSL的未来,将朝着“更智能、更开放、更落地”的方向发展:
1. 人工智能与DSL的融合
自然语言到DSL的转换:将自然语言场景描述转换为DSL,降低场景声明的门槛,让产品经理也能直接编写场景描述。
智能场景生成:使用机器学习技术生成场景,覆盖更多的边缘场景,甚至生成对抗性场景,提高测试的有效性。
自适应优化:基于测试结果自动优化场景描述,实现动态测试和迭代。
2. 标准化与生态建设
国际标准统一:推动OpenX系列标准的统一,实现场景描述的互操作性,让不同厂商的场景数据可以互通。
开源生态建设:开发开源的场景编辑和执行工具,建立共享的场景库和测试用例,提高场景的复用性。
3. 应用领域扩展
从测试到训练:生成用于训练的多样化场景,提高模型的泛化能力,作为强化学习的环境描述语言,支持智能驾驶模型的训练。
从仿真到实车:记录实车测试中的场景,用于后续的分析和复现,支持仿真和实车测试的统一描述,提高测试的效率。
结语
自动驾驶场景的“可声明性”,是衡量DSL设计好坏的核心标尺。OpenScenario 2.0 DSL提供了一套“如何用DSL解决场景声明问题”的方法论——用层次化抽象解决粒度矛盾,用声明式语法聚焦意图和约束,用模式化匹配打通数据和场景的闭环。
但企业的实践经验告诉我们,DSL的落地不仅需要理论支撑,更需要适配自身业务的定制化方案和完善的数据质量管控体系。只有将理论与实践结合,才能让DSL在自动驾驶的测试、验证、数据挖掘中真正发挥作用,推动自动驾驶技术的发展。
作者简介:智驾具身数据挖掘。世界五百强车企自动驾驶数据团队,致力于通过工程手段让dirty的work变得不dirty,with efficiency!
参考资料: