作者|阿哲
很多人一直有一个刻板印象:硬派SUV,不适合做高阶智驾。
原因很简单。城市智驾解决的是:红绿灯、车道线、路口博弈
而越野车面对的是:山路、土路、无车道线
简单说:城市道路是规则世界,越野是混沌世界。
所以过去几年你会发现一件事:几乎所有高阶智驾,都出现在轿车或城市SUV上。
直到最近,地平线和iCAR 做了一件非常反常识的事情:他们把 国内首个量产“一段式端到端”智驾系统 HSD,放进了一台硬派SUV:iCAR V27。
而且价格只有:15–25 万。如果这件事真的成立,那意味着一个更大的变化:
高阶智驾,第一次真正进入主流市场。
01#
自动驾驶,正在经历一次“范式革命”
自动驾驶过去十年,其实只做了一件事:从工程问题,变成AI 问题。行业技术大致经历了三代架构。
第一代:规则时代
系统拆成很多模块:感知→ 预测 → 规划 → 控制,每一个环节都依赖工程规则。优点是稳定、可控,缺点是复杂场景几乎无法穷举。
比如:非标准路口、行人乱穿、临时施工、规则体系会迅速崩溃。
第二代:两段式端到端
行业开始引入神经网络。感知用AI,决策部分模型化,系统更聪明,但仍然存在“模块墙”。
第三代:一段式端到端
自动驾驶开始真正AI 化,系统逻辑变成:传感器输入→ 直接输出驾驶轨迹,没有中间模块。
这也是为什么很多人认为:端到端,才是自动驾驶真正的AI 形态。但真正能量产落地这个架构的玩家,非常少。
目前行业普遍认为只有两个:1、特斯拉FSD2、地平线HSD。
当硬派SUV 遇上高阶智驾,会碰撞出怎样的火花?也正因为如此,
HSD被很多业内人士称为:中国版FSD。
02#
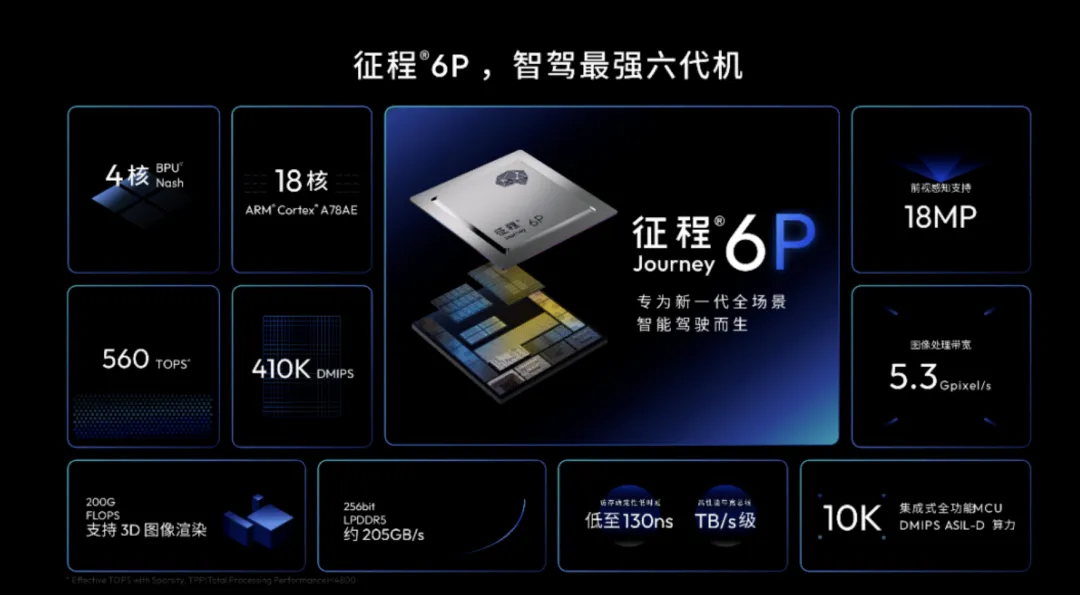
一颗国产芯片,撑起560TOPS算力
端到端系统有一个前提就是算力。没有算力,一切只是概念。
HSD 的核心芯片叫:征程6P。
关键指标非常激进:560 TOPS 算力,205GB/s 存储带宽,160ms 决策延迟
160ms是什么概念?人类驾驶员平均反应时间大约:280ms。
换句话说:机器已经开始比人反应更快。更重要的是,征程6P采用的是 BPU纳什架构,专门针对Transformer大模型优化。
这意味着:这颗芯片从设计开始,就是为了AI驾驶模型服务的。
过去几年,国内智驾芯片几乎全部依赖英伟达。
而征程6P意味着一件事:国产算力,开始真正支撑大模型智驾。
03#
27个传感器,是另一种“世界感知”
很多人一听端到端,就会想到特斯拉的纯视觉路线。但中国路况复杂度远高于欧美。
HSD 的方案是:多传感器融合+ 端到端决策。
整车一共搭载:27个传感器,激光雷达×1、800万像素摄像头 ×11、毫米波雷达×3、超声波雷达×12
其中激光雷达最远探测距离:超过200米。在一些极端路况测试中,例如:
重庆洪崖洞复杂道路,丽江山路弯道,统感知准确率达到:98%以上。
可以理解为:端到端负责思考怎么开车,而传感器负责看清这个世界。
04#
端到端,到底强在哪?
很多车企也在说自己是端到端。但关键区别只有一个:有没有中间翻译层。传统自动驾驶系统:传感器→ 目标识别 → 语义理解 → 决策
每一步都会损失信息。而一段式端到端只有一步:直接学习驾驶行为。
这种架构带来了三个明显变化。
第一:驾驶更平顺
点刹、蛇形变道等问题减少90%以上,晕车概率下降85%。
第二:泛化能力更强
系统可以理解很多中国特色场景:潮汐车道,施工绕行,非标准路口,不再依赖提前建模。
第三:驾驶更像人类
例如:无保护左转主动降速,对加塞车辆柔性博弈,这些能力来自:5亿公里中国路况训练数据。
05#
真正的杀手锏:城野通吃
目前绝大多数高阶智驾,解决的是城市道路。但HSD 想解决的,是:非标准路况。
例如:山路,乡村道路,无车道线,为此iCAR V27 推出了一个新功能:智驾漫游模式。
特点是:不需要导航,不需要地图,不需要车道线,系统会自己寻找可行路径。
在丽江山路测试中,车辆可以自动:避开坑洼,调整车速,规划路线
这其实更接近:越野驾驶辅助。
06#
自动驾驶真正的战争:成本
过去几年,高阶智驾有一个明显问题:太贵。很多系统的硬件成本:8000 – 15000 元。而HSD 的目标成本大约:6000 – 7000 元。
更关键的是,它搭载在:15万级车型。这意味着一件事:高阶端到端智驾,第一次真正进入大众市场。
07#
写在最后
地平线×iCAR HSD 的落地,证明了高阶智驾不再是豪华车的专属,也打破了硬派 SUV“重越野、轻智能” 的魔咒。
以560TOPS 算力为基、一段式端到端为魂、27 颗传感器为眼,HSD 实现了 “城野皆好开” 的核心承诺,更定义了国产智驾的新标杆
图片资料来源于网络整理,如有侵权即删,请联系小编
扫描下方二维码,添加智驾派小助理微信,免费部分领取以下材料









 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
