想象一下:你的自动驾驶汽车正驶入城市中心的高楼林立区,两侧玻璃幕墙反射着阳光。突然,车辆轻微偏移车道,系统发出警报——“定位信号丢失”。或者,在地下车库入口,导航瞬间“失明”,车辆无法判断自己是否还在正确路径上。问题来了,明明开着GPS,为什么自动驾驶还会“迷路”?
答案是,仅靠传统GPS(或泛指GNSS),根本无法满足自动驾驶对“精准、连续、可靠”定位的严苛要求。
GPS(更准确地说,是GNSS,包括北斗、伽利略等)通过接收至少4颗卫星的信号,计算信号传播时间,从而确定你在地球上的位置。在空旷野外,它能实现米级甚至亚米级精度。
但现实很"骨感":
高楼遮挡 → 可见卫星数量骤减;
信号反射(多路径效应) → 伪距测量错误;
隧道/高架下 → 完全无信号;
动态场景(急转弯、加减速) → 单靠GNSS无法感知姿态与瞬时速度变化。
结果就是车辆可能“以为”自己在隔壁车道,甚至“穿越”到楼里!
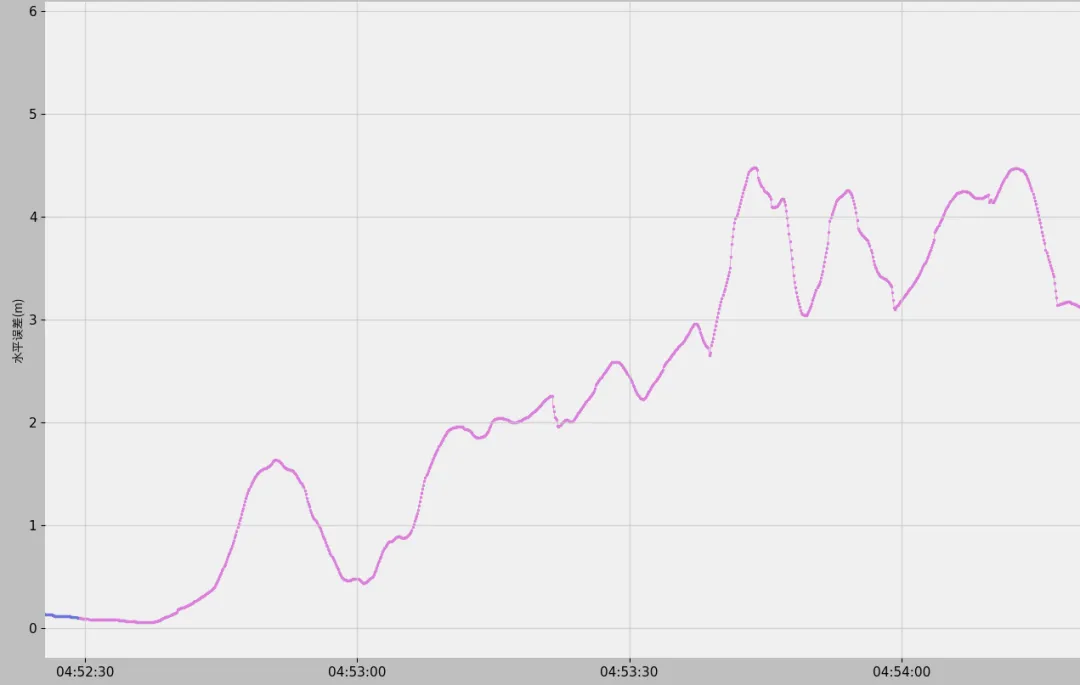
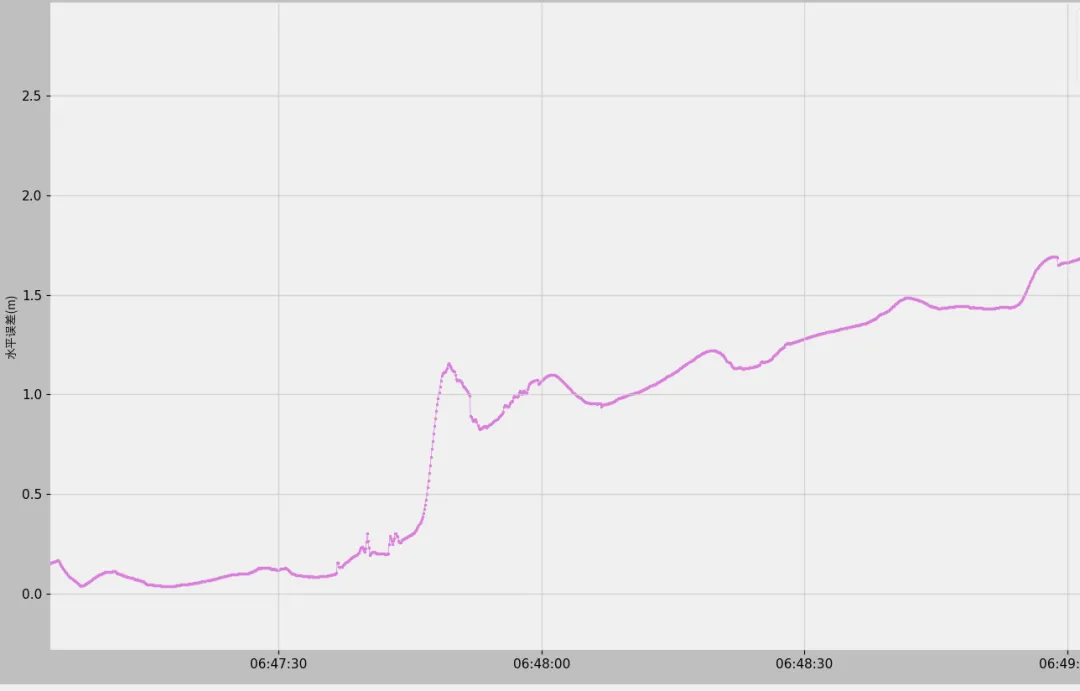
目前市面上许多智能汽车仍依赖“GNSS + 轮速计 + 低精度IMU”的简易融合方案。这类系统在高速公路上或许够用,但在以下场景频频“掉链子”:
城市复杂路口:定位抖动超1米,无法精准识别转向车道;
静止状态:无法输出航向(单天线GNSS在静止时无方向);
信号中断超过10秒:位置迅速漂移,系统被迫降级或退出自动驾驶。
这就像让一个蒙眼的人走路——偶尔睁眼看一眼方向,其余时间全靠猜测。
对于L3及以上自动驾驶,这是不可接受的风险。
为解决这一行业难题,阿奇智能自主研发了PBOX紧组合高精度GNSS/INS组合导航接收机,从底层架构实现三大突破:
紧组合融合算法,不再简单拼接GNSS与IMU数据,而是将原始伪距、载波相位与IMU测量值在滤波器内深度融合,即使仅剩2颗卫星,也能维持高精度输出。
全频多系统 + 双天线定向,同时支持GPS L1/L2/L5、北斗 B1I/B1C/B2a 等多频点,抗电离层误差;双天线基线设计,静止状态下也能输出0.1°精度的航向角。
车规级高稳MEMS IMU + 自适应温补模型,采用工业级IMU,配合自研温度漂移补偿算法,在-40°C~85°C工况下保持姿态稳定,确保GNSS中断期间航位推算(Dead Reckoning)误差 < 0.1米/30秒。
阿奇智能PBOX紧组合导航接收机,不是“GNSS+INS”,而是“GNSS×INS”——真正意义上的1+1>2。
选择阿奇智能PBOX紧组合导航接收机,就是选择让每一辆车,无论身处何地,都拥有厘米级的“空间自觉”,在复杂环境中依然能够实现稳定、连续且可靠的定位与导航能力。





 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
