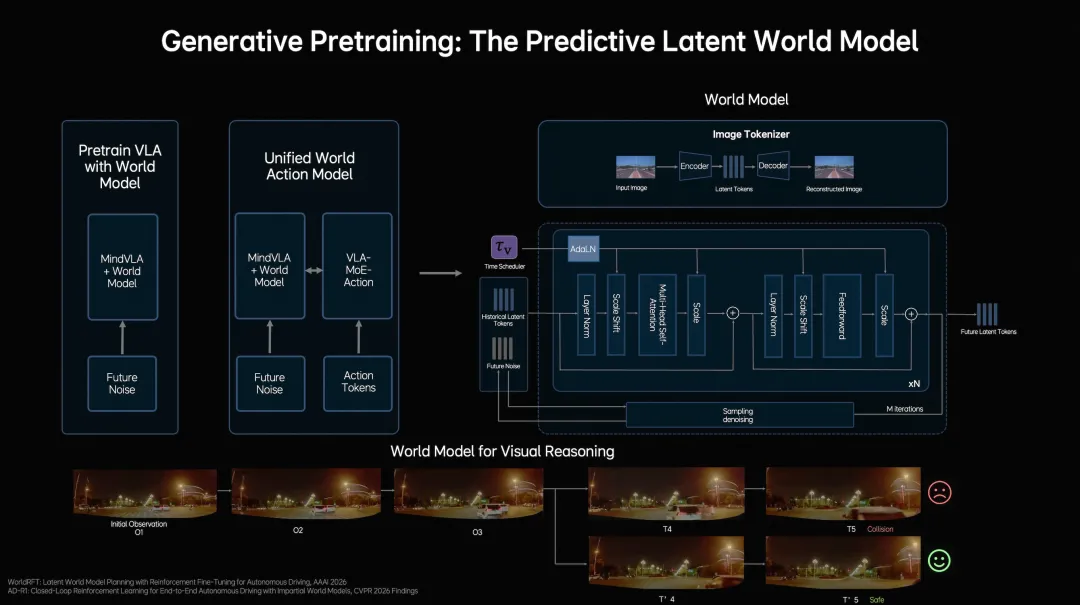
Momenta这两天宣布推出R7强化学习世界模型,几乎同时,理想在GTC上发布新一代基座模型MindVLA-o1。一边是理想、小鹏、元戎从端到端转向VLA,一边是华为、Momenta押注世界模型。行业一直在争论:VLA和世界模型,到底谁才是终局?
但仔细看各家技术架构,会发现一个有意思的事实:他们几乎都在同时用世界模型和VLA。
理想的MindVLA-o1架构里,世界模型在隐空间里“想象”未来,VLA把想象的结果变成驾驶轨迹。一个负责预测,一个负责执行,不是非此即彼,是各司其职。
同样的逻辑,特斯拉在做神经世界模拟器,小鹏的VLA依赖世界模型提供仿真数据,元戎的基座模型也需要世界模型做闭环训练。说白了,技术路线还在演进,但共识正在形成:不是“选哪个”,而是“怎么融合”。
算法迭代还在加速,正如理想詹锟在GTC上所说:“自动驾驶只是物理AI的一个起点。”面对快速变化的技术路线,一个人真心追不明白,欢迎加入自动驾驶之心知识星球。目前星友面对面已经开展到了第四期,我们聊技术、聊趋势、聊变化。未来柱哥还会持续邀请学术界和工业界的同行和大家交流。欢迎加入自动驾驶之心知识星球,我们准备的大额的新人优惠......
对于很多想入门的同学来说,试错成本有点高。没时间和缺乏完整的体系是最大问题,这也容易导致行业壁垒越来越高,如果想要卷赢那就更加困难了。
所以我们联合了诸多学术界和工业界的大佬,共同打造了我们维护三年之久的『自动驾驶之心知识星球』!星球目前集视频 + 图文 + 学习路线 + 问答 + 求职交流为一体,是一个综合类的自驾社区,已经超过4000人了。我们期望未来2年内做到近万人的规模。给大家打造一个交流+技术分享的聚集地,是许多初学者和进阶的同学经常逛的地方。
如果你也想和我们一起推动自驾领域的进步,欢迎加入我们的社区团队,和我们一起推动!我们准备了大额优惠券给大家,欢迎微信扫码领取,还有少量~
社区内部还经常为大家解答各类实用问题:端到端如何入门?自动驾驶多模态大模型如何学习?自动驾驶VLA的学习路线。数据闭环4D标注的工程实践。快速解答,方便大家应用到项目中。
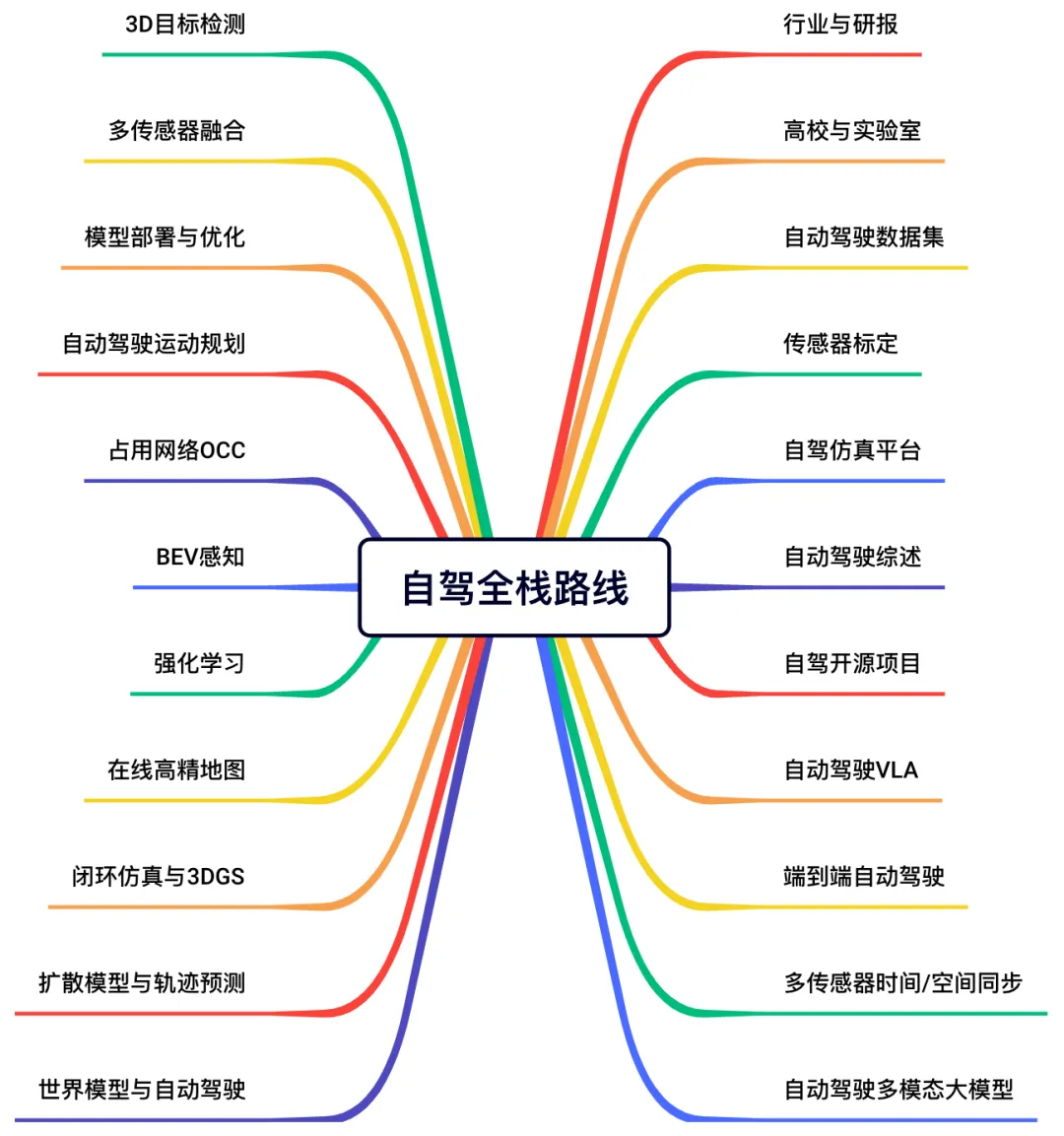
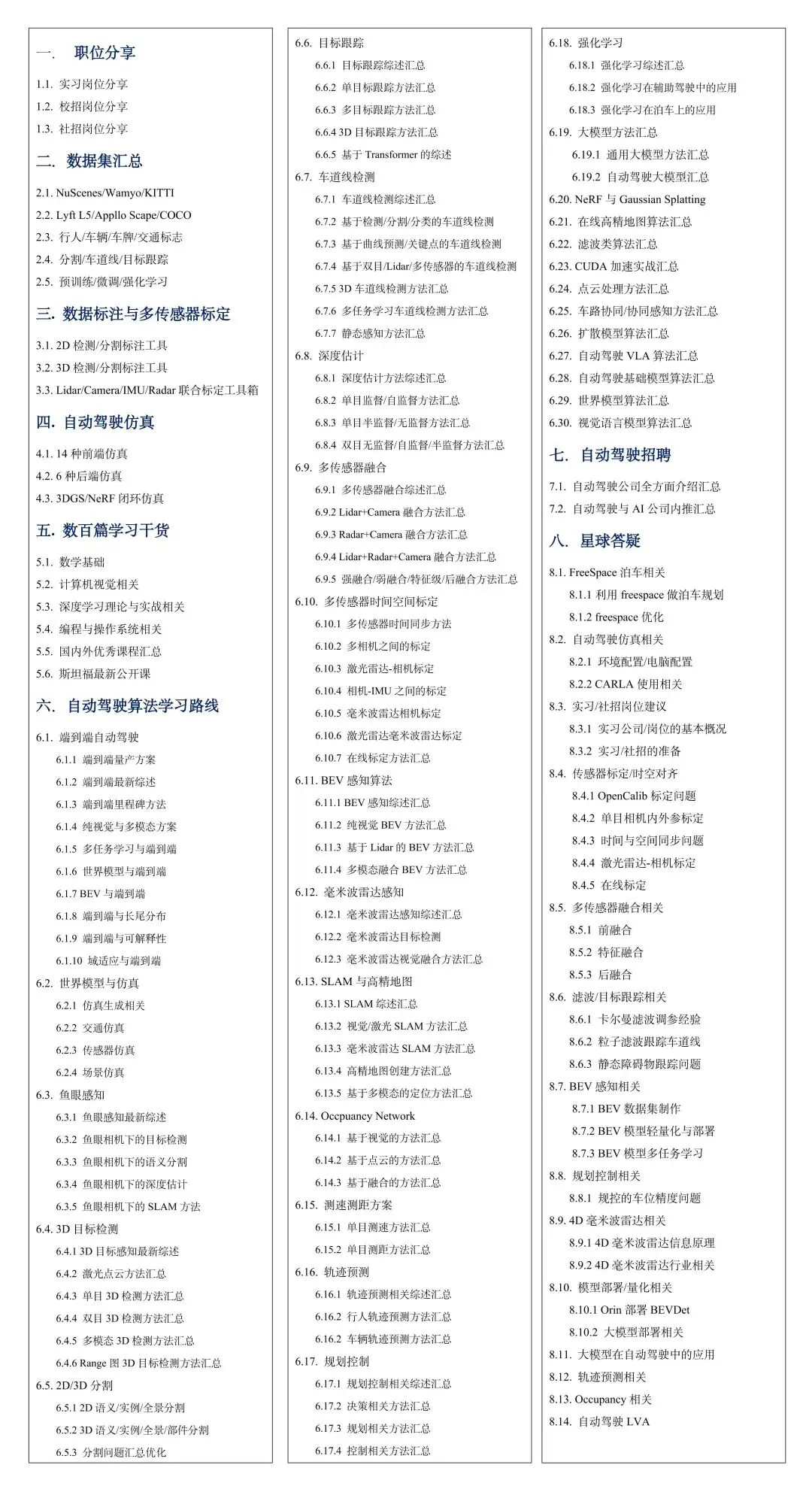
更有料的是:星球内部为大家梳理了近40+技术路线,无论你是咨询行业应用、还是要找最新的VLA benchmark、综述和学习入门路线,都能极大缩短检索时间。星球还为大家邀请了数十位自动驾驶领域嘉宾,都是活跃在一线产业界和工业界的大佬(经常出现的顶会和各类访谈中哦)。欢迎随时提问,他们将会为大家答疑解惑。除了上面的问题,我们还为大家梳理了很多其它的内容:
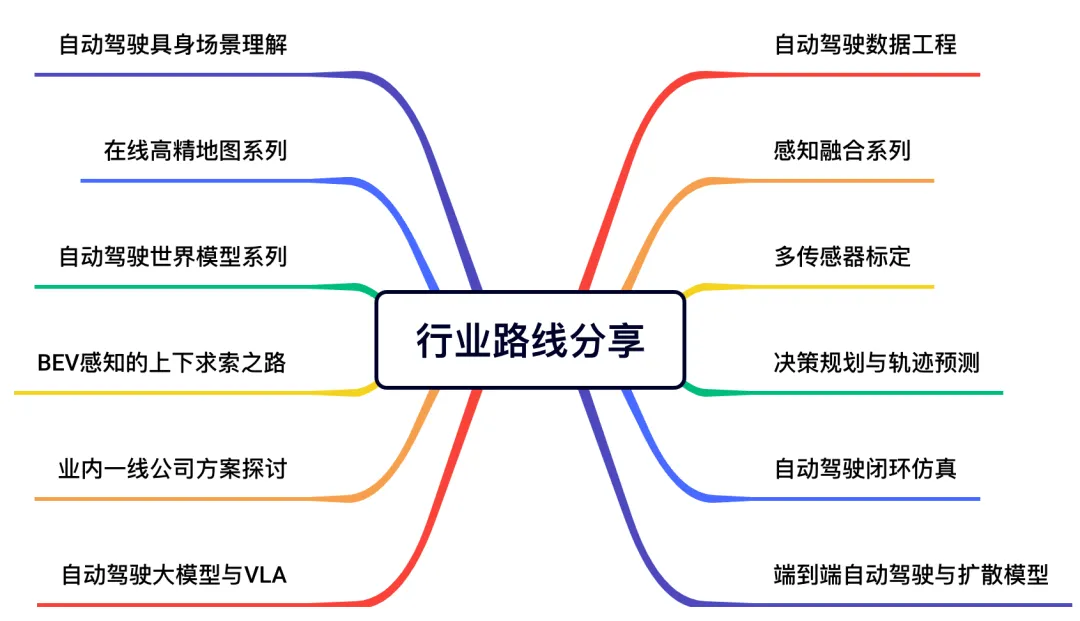
我们会不定期和一线的学术界&工业界大佬畅聊自动驾驶发展趋势,探讨技术走向和量产痛点:
这是一个认真做内容的社区,一个培养未来领袖的地方。星球内部梳理了近40+自动驾驶技术方向,同时也有面向求职的问答梳理。
针对入门学习的同学,我们更是准备了全栈方向的学习课程,非常适合0基础的小白。
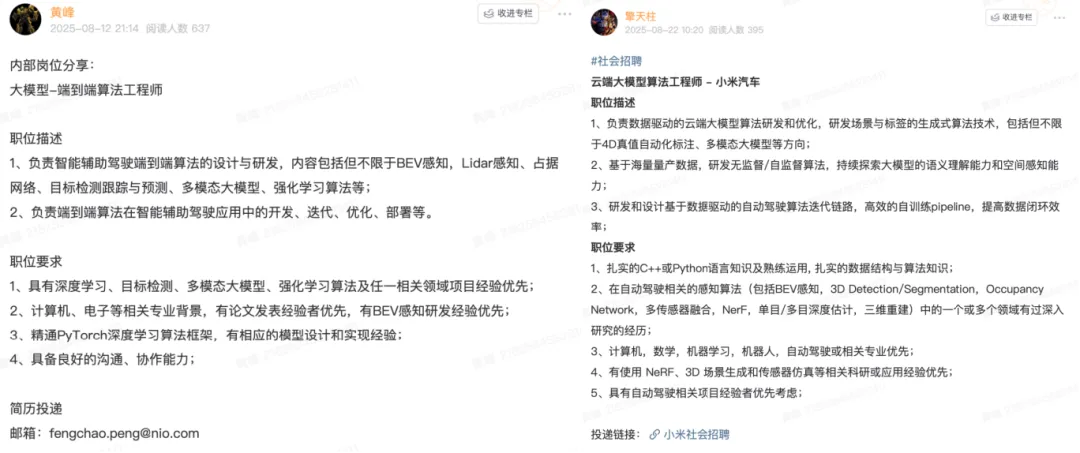
我们还和多家自动驾驶公司建立了岗位内推机制,欢迎大家随时艾特我们。第一时间将您的简历送到心仪公司的手上。
针对入门者,我们整理了完备的小白入门技术栈和全栈路线图。
已经从事相关研究的同学,我们也给大家提供了很多有价值的产业体系和项目方案。
欢迎和我们一起打造完整的自驾生态。
社区创建的出发点是给大家提供一个自动驾驶相关的技术交流平台,交流学术和工程上的问题。星球内部的成员来自国内外知名高校实验室、自动驾驶相关的头部公司,其中高校和科研机构包括但不限于:上海交大、北京大学、CMU、清华大学、西湖大学、上海人工智能实验室、港科大、港大、南洋理工、新加坡国立、ETH、南京大学、华中科技大学、ETH等等!公司包括但不限于:蔚小理、地平线、华为、大疆、广汽、上汽、博世、轻舟智航、斑马智行、小米汽车、英伟达、Momenta、百度等等。前沿技术聚集地一直是自动驾驶之心的标签!
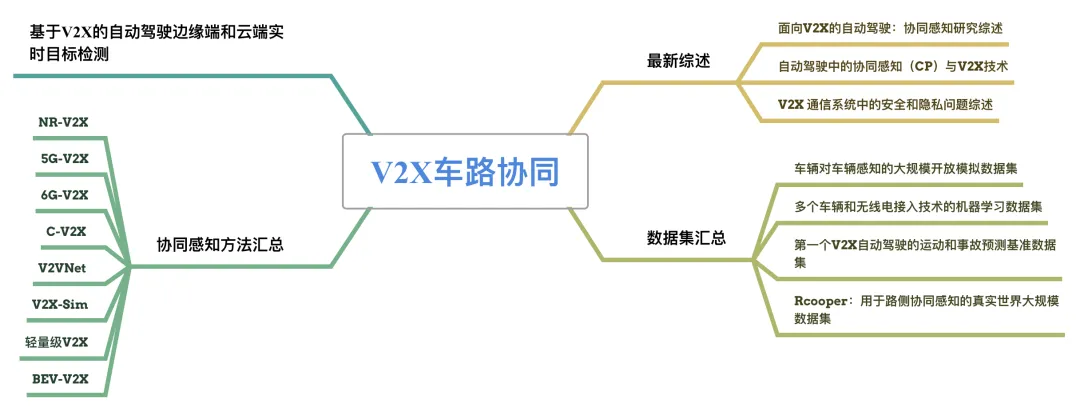
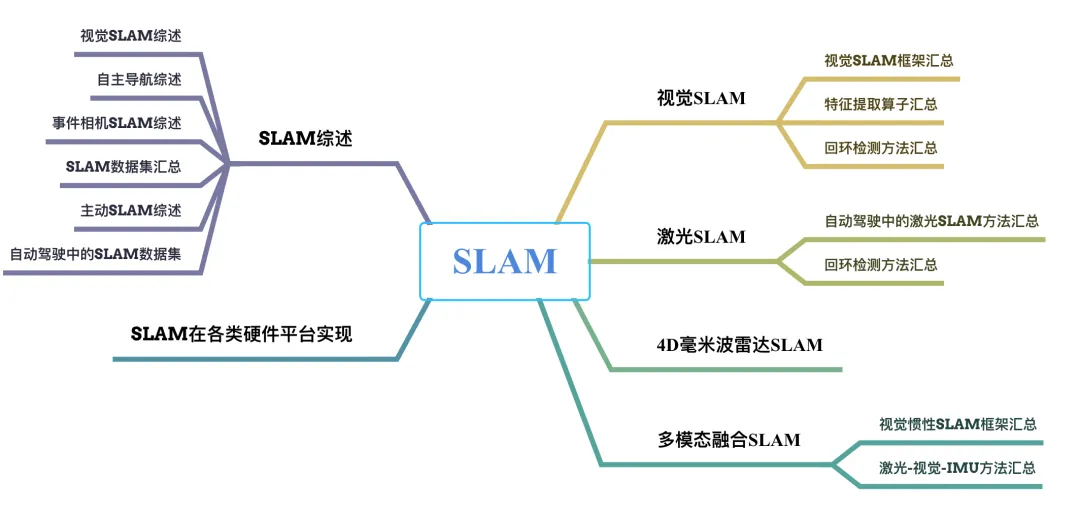
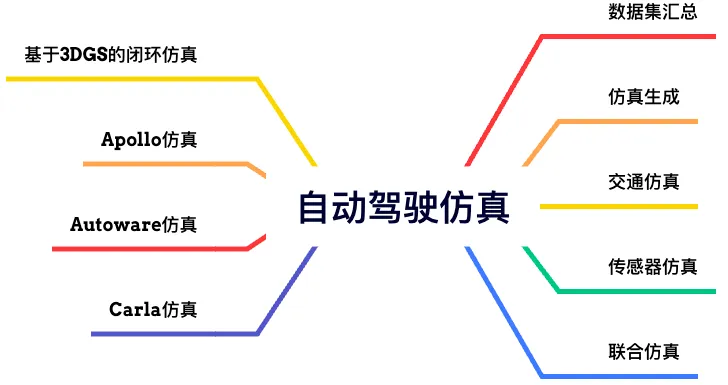
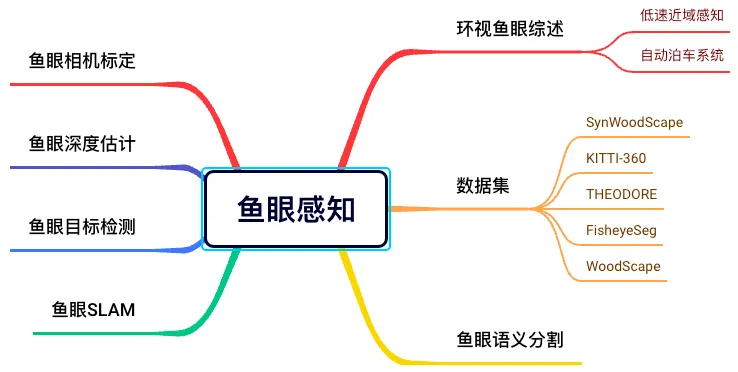
我们为大家汇总了近40+开源项目、近60+自动驾驶相关数据集、行业主流自驾仿真平台、以及各类技术学习路线,包括但不限于:
这里能够让小白快速入门,让已经入门的同学进一步提升,已经提升的同学结交更多的朋友。
星球内容一览!
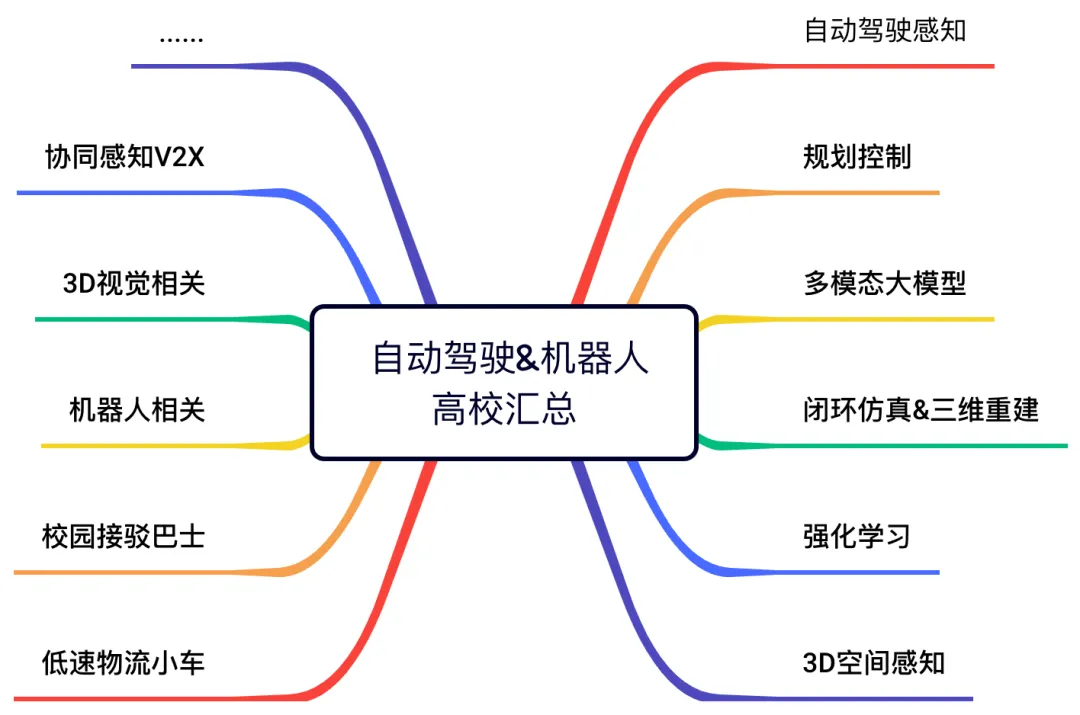
星球内部为大家汇总了自动驾驶&机器人多个研究方向的国内外知名实验室,供大家后期读研、申博、博后参考。
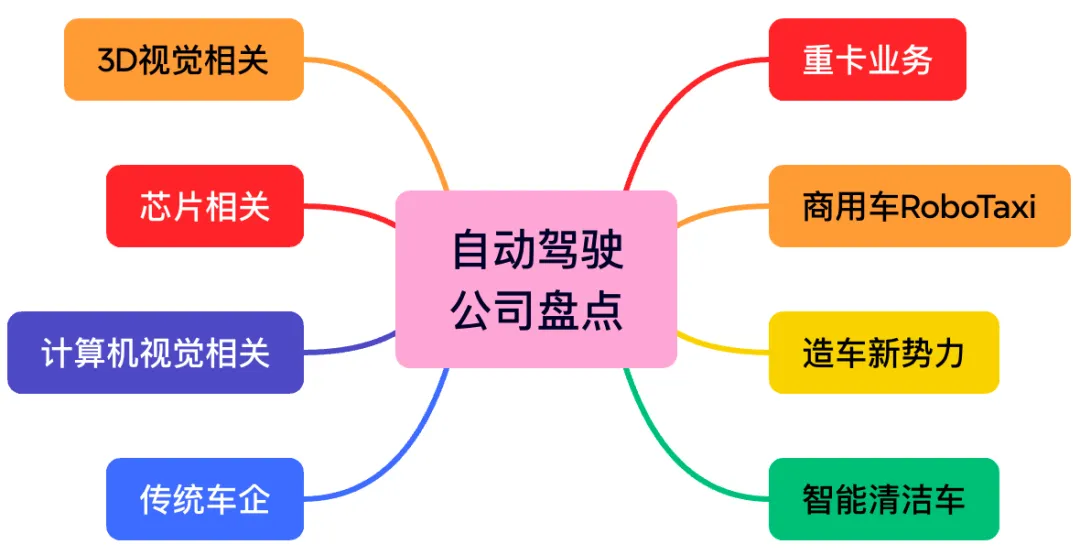
星球内部为大家汇总了各类国内外各类自动驾驶相关机器人公司,涉及RoboTaxi、重卡业务、造车新势力等等!
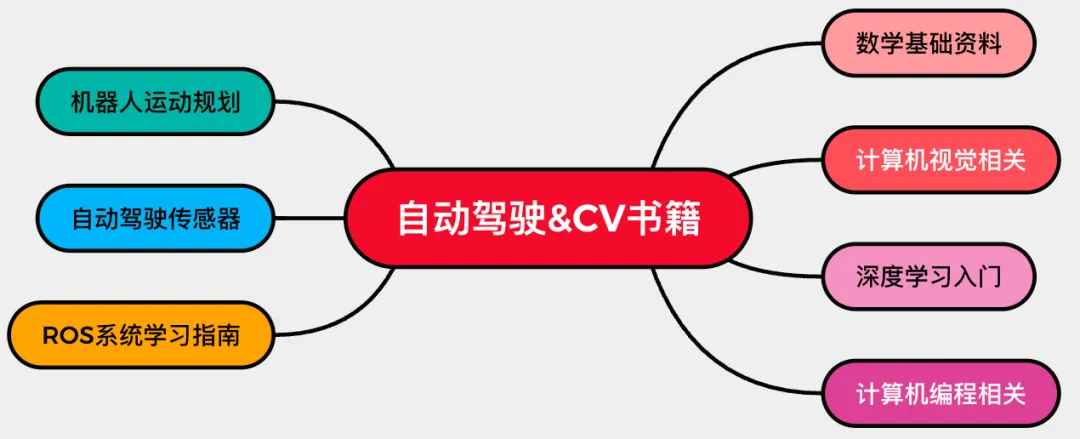
星球内部汇总了自动驾驶和CV相关的学习书籍,涵盖数学基础、计算机视觉、深度学习入门、coding、运动规划、自动驾驶传感器、ROS系统学习指南等等~
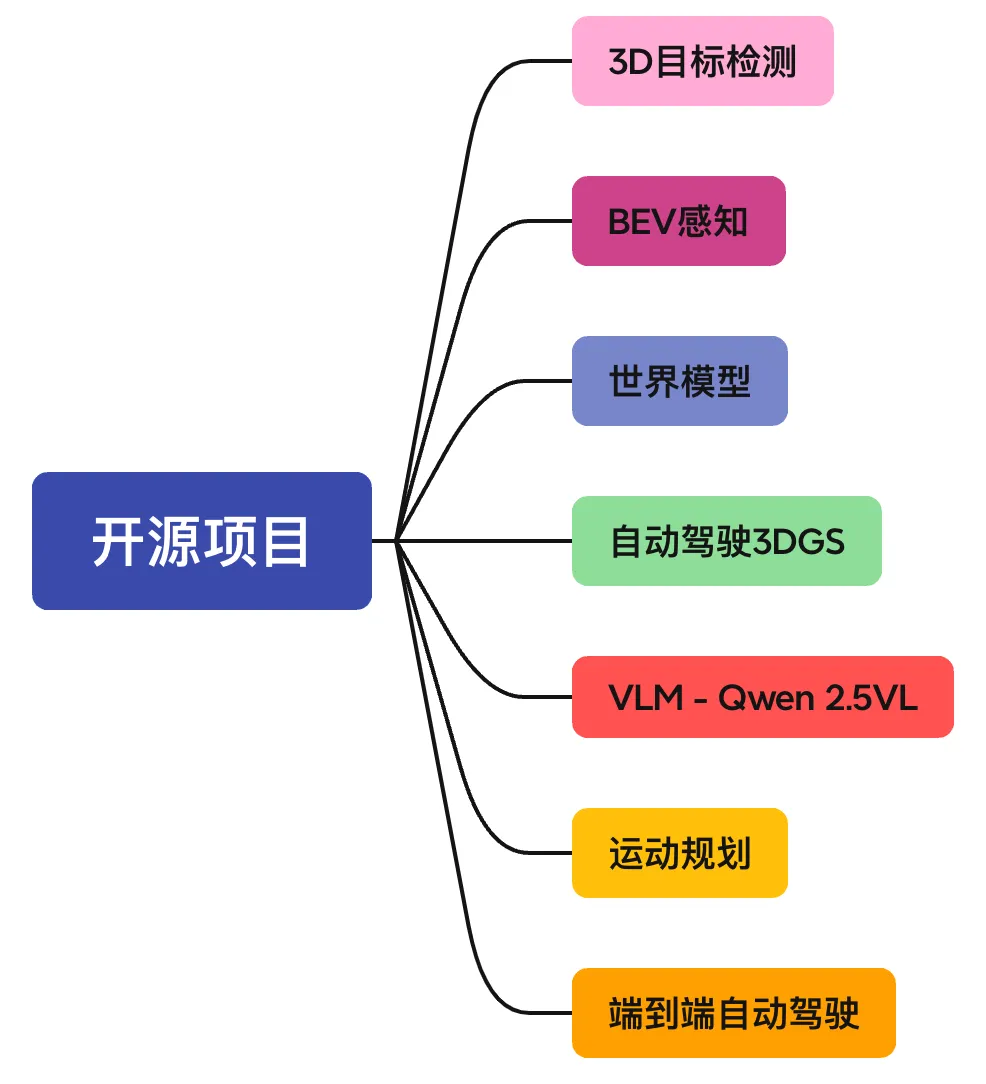
星球内部针对3D目标检测、BEV感知、世界模型、闭环仿真3DGS、自动驾驶大模型、端到端自动驾驶等多个领域的开源项目进行了汇总,助力快速上手。
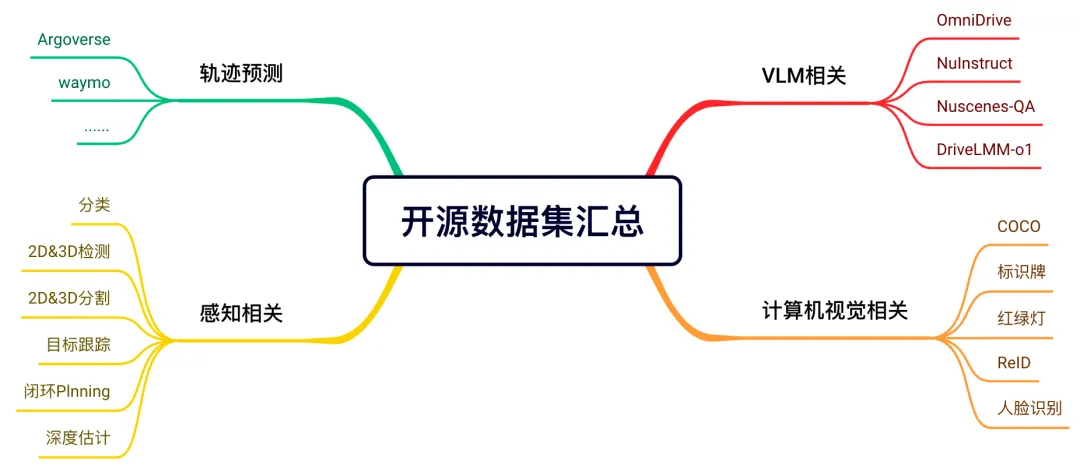
星球内部针对自动驾驶相关数据集进行了详细的梳理,针对通用CV数据集、感知相关数据集、轨迹预测等等。尤其是自动驾驶多模态大模型数据集,我们详细梳理了自动驾驶VLM预训练数据集、微调数据集、思维链数据集、强化学习数据集等等~
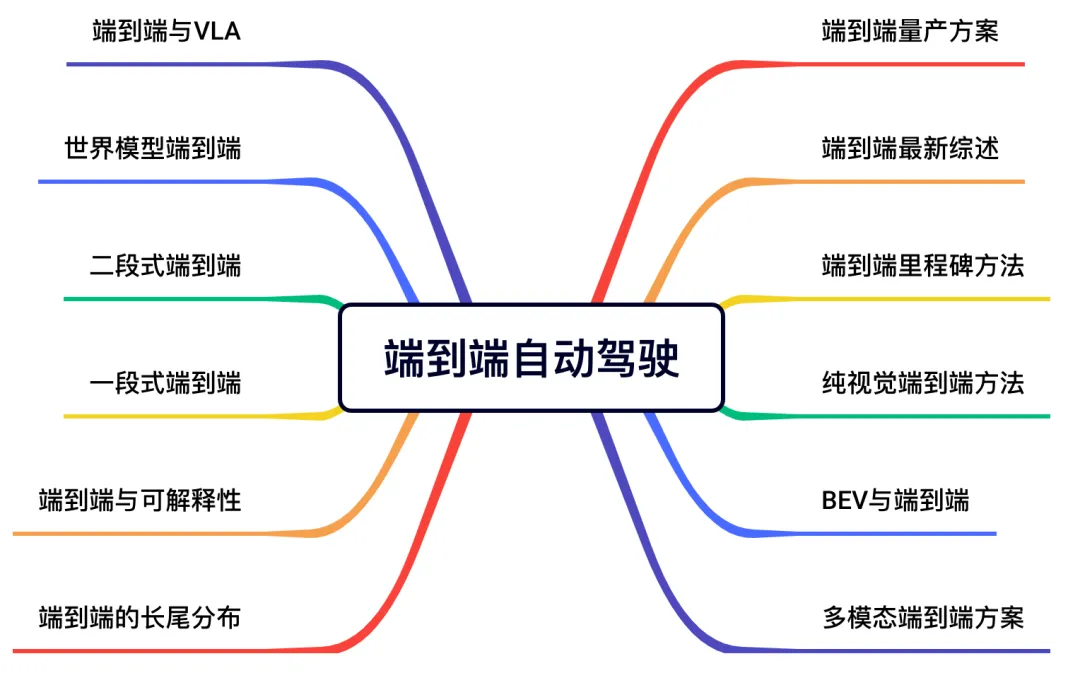
针对学术界和工业界的研究热点 - 端到端自动驾驶,我们详细梳理了一段式端到端、二段式端到端、量产方案、综述汇总、里程碑方法、VLA相关算法等等,兼顾学术界和工业界,真正做到知行合一~
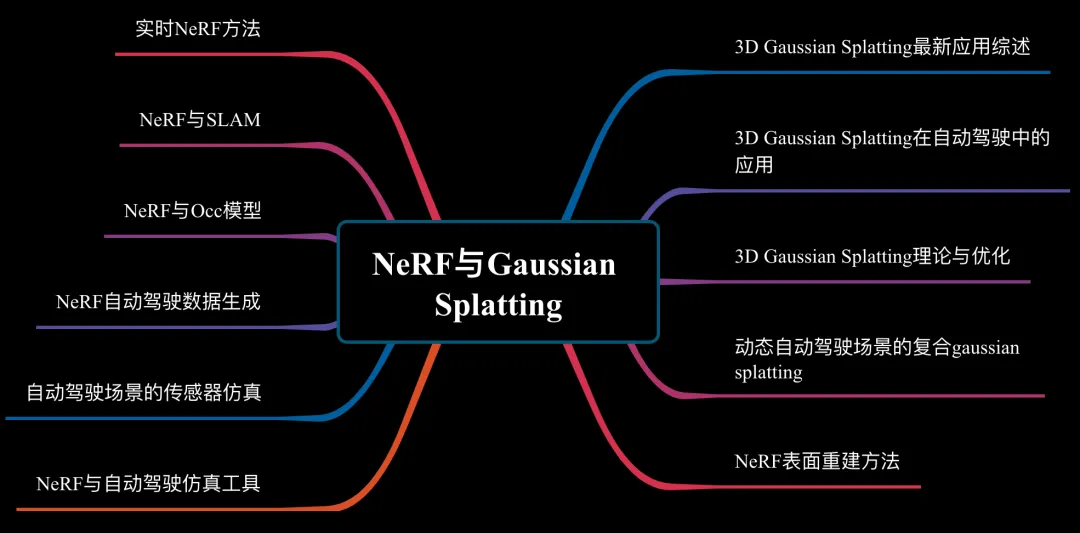
我们为大家汇总了3DGS和NeRF的相关技术领域,3DGS的算法原理、自动驾驶场景重建与闭环仿真、NeRF与自动驾驶仿真,NeRF与自动驾驶感知,同时我们也邀请到诸位学术界大佬分享3DGS和NeRF的最新工作,这里全都有!
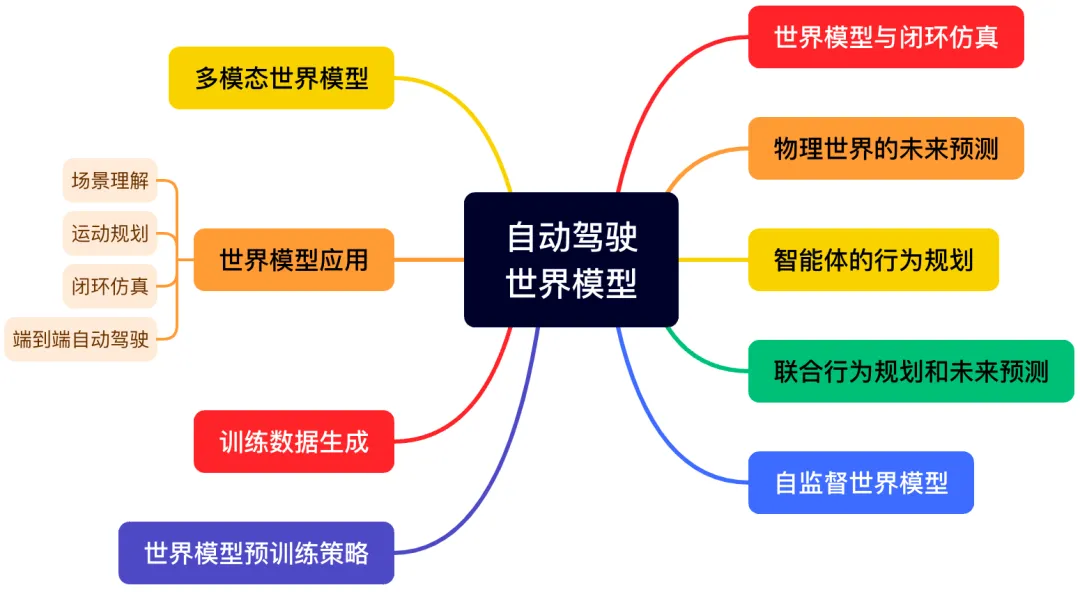
针对当前学术界和工业界的热点 - 自动驾驶世界模型,星球内部做了详细的汇总,涵盖技术前沿和业界应用。
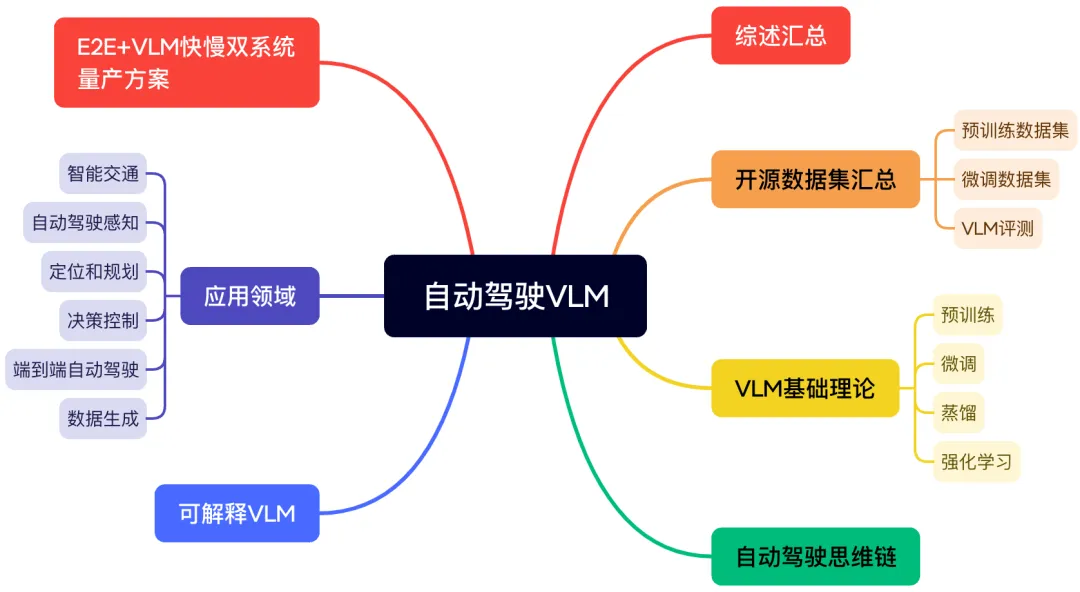
我们汇总了自动驾驶VLM最新综述、开源数据集、思维链推理、量产方案快慢双系统DriveVLM等多项内容,让大家对这一前沿领域可以更深入的理解。
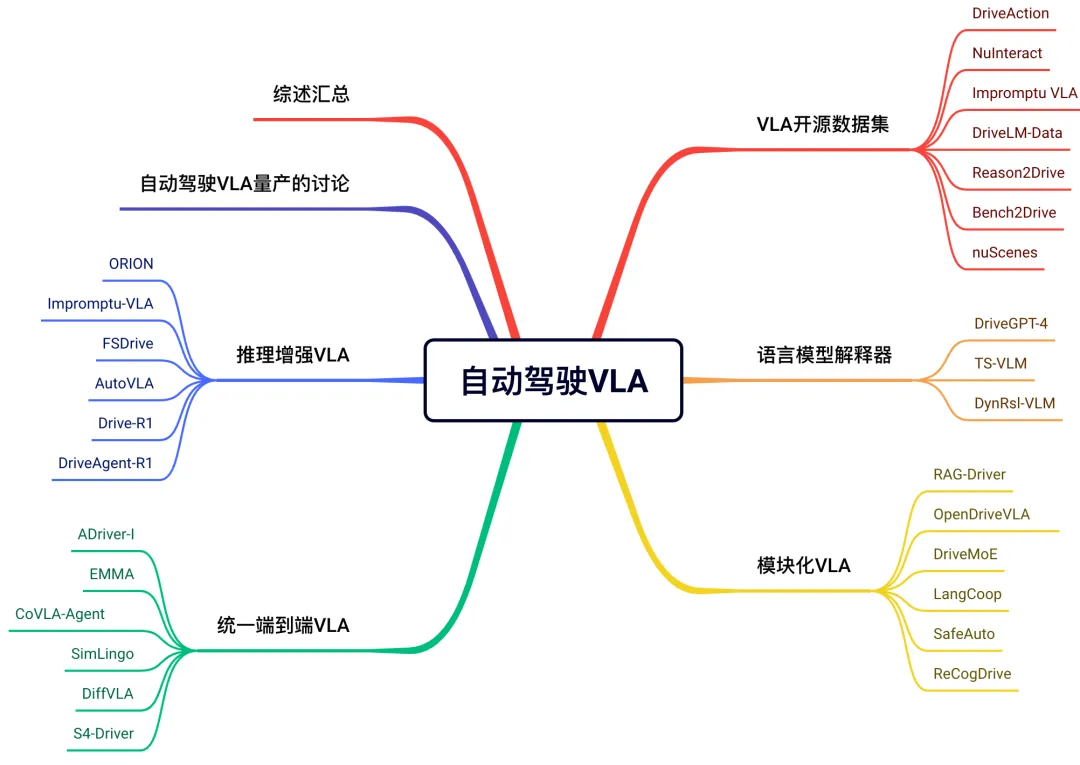
针对2025年最火的自动驾驶VLA,我们详细梳理了最新的综述、VLA开源数据集、作为语言解释器的相关算法、模块化VLA、端到端VLA和推理增强VLA,更有诸多关于VLA量产的讨论,在这里有你想知道的一切~
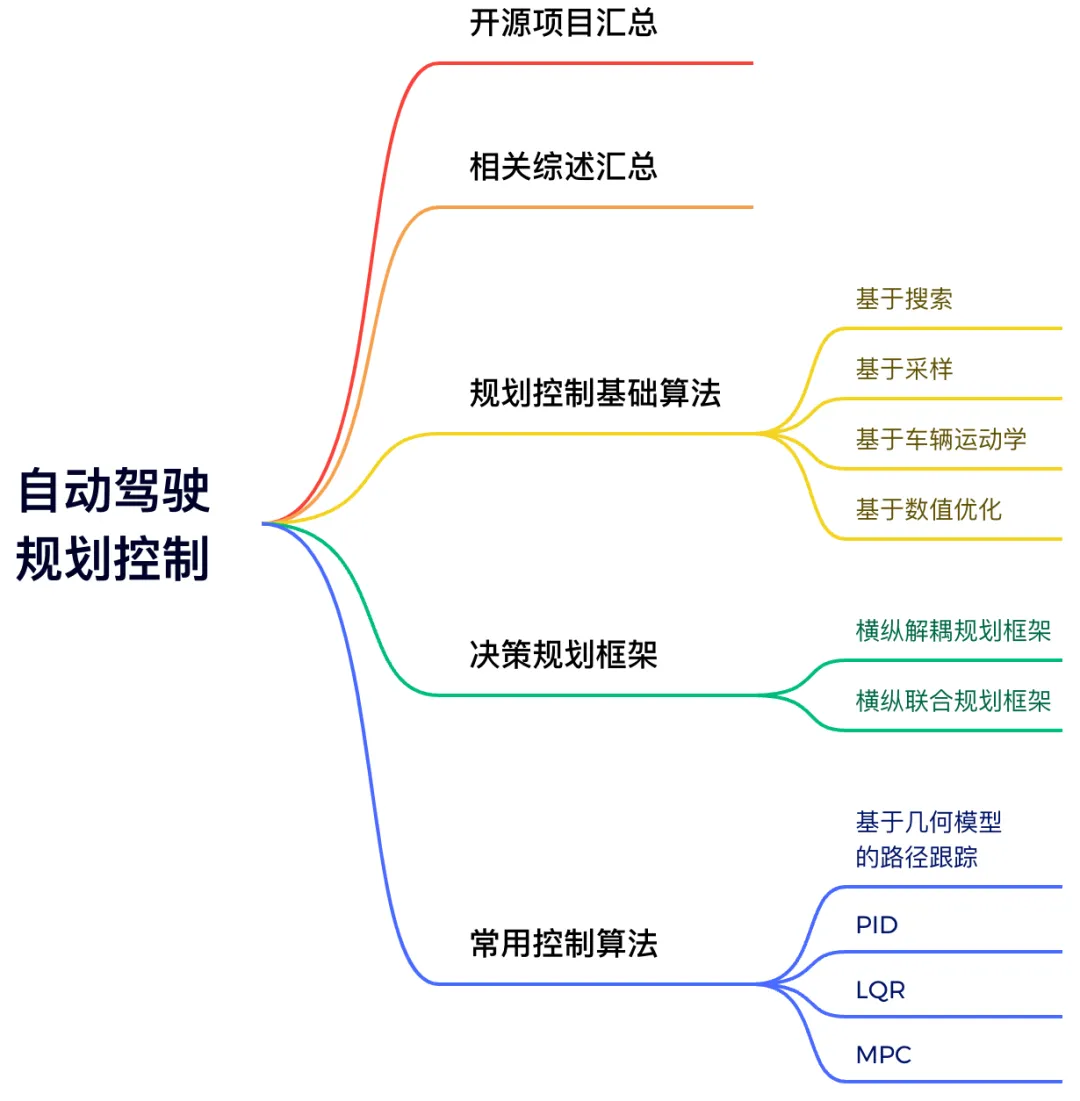
星球内部汇总了传统规划内容的相关技术栈,包括但不限于规划控制基础算法、决策规划框架和常用控制算法。
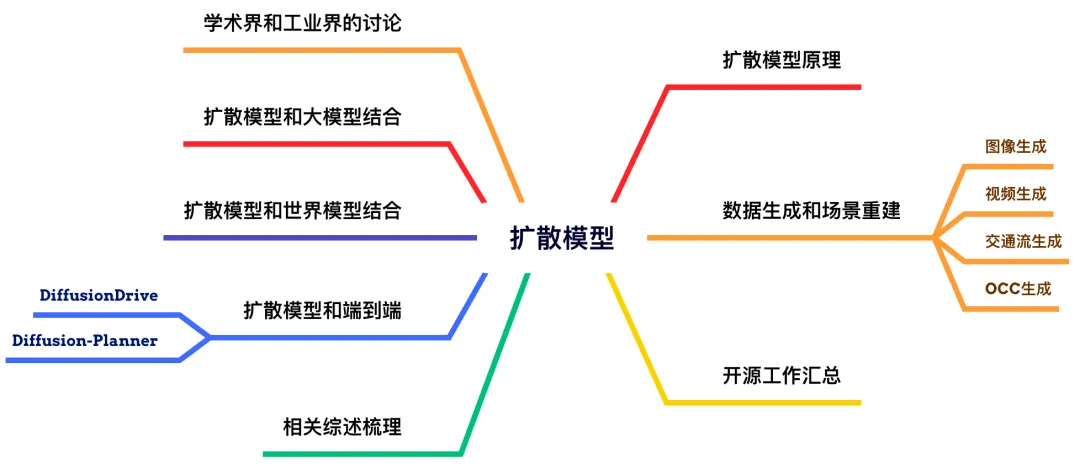
扩散模型作为当下的研究热点,星球内部也做了非常详细的梳理,从算法原理,到数据生成、场景重建、端到端、世界模型结合、大模型结合等等!
BEV感知作为当下量产的基石,星球内部做了非常成熟的梳理,纯视觉、多模态、多任务、激光雷达和相关数据集以及工程部署等等~
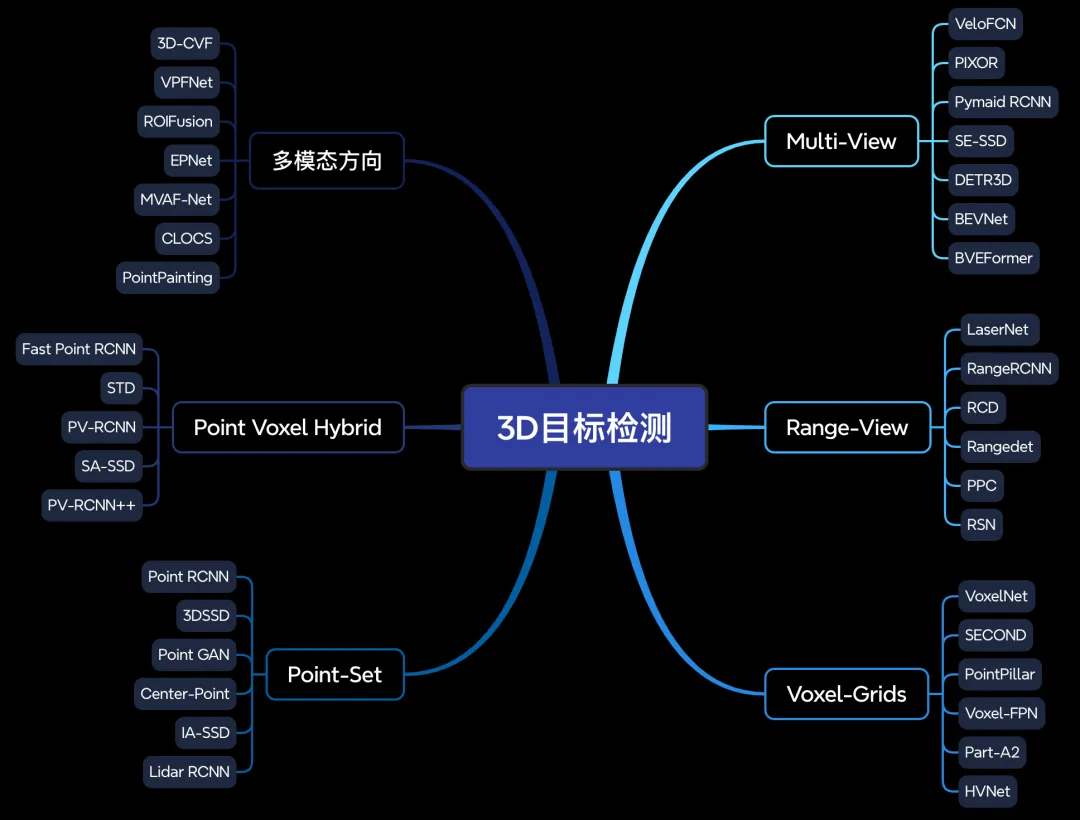
针对3D目标检测领域,我们梳理了环视方法、range-view、基于voxel、Point及多模态方向。
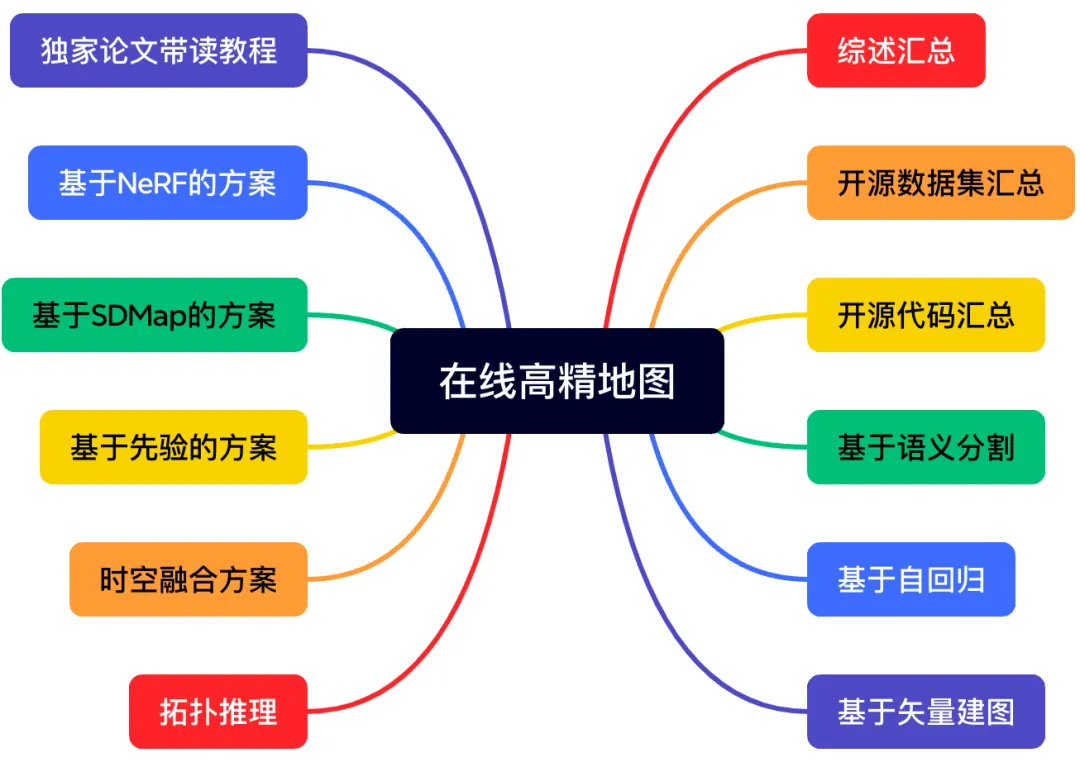
在线高精地图是无图NOA量产方案的核心,星球详细梳理了近几年学术界和工业界关注最多的工作。
强化学习是VLM必备的组件,星球内部梳理了强化学习理论、常用算法、优秀公开课、热门工作等等内容,一应俱全!
星球内部会员独享七大福利视频教程!涵盖世界模型、自动驾驶大模型、Transformer、3D目标检测、毫米波感知等等...
星球内部不定期邀请行业大佬直播分享,直播内容可以反复观看,部分直播内容一览!目前已经超过一百场专业技术直播!!!
星球成员可以在星球内部自由提问,无论是工作选择还是研究方向选择,都能得到解答~
不定期分享和业内大佬的观点交流!
欢迎扫码加入我们的社区,和近300家机构与自驾公司成员一起交流产业、产品、求职等内容。