景烁科技正式发布全新物理AI系列自动驾驶感知数据集,凭借千万帧海量真实场景数据,全方位覆盖自动驾驶核心感知场景,为L4级自动驾驶的全域泛化能力提供强力数据支撑,进一步夯实公司在物理AI领域的技术布局。
此次发布的数据集聚焦自动驾驶感知核心环节,精准涵盖红绿灯识别、激光雷达点云感知、车辆检测与意图预测三大关键模块。目前,该数据集已成功应用于多家头部主机厂的城市NOA功能研发工作,支撑其功能落地,成为自动驾驶量产落地背后的核心数据驱动力。
自动驾驶系统的智能化进阶,核心依赖训练数据的覆盖广度与标注精度。算法实现精准决策需历经“接收数据—总结规律—形成判断”的完整流程,数据样本类型越丰富、场景覆盖越全面、标注精度越细致,算法的感知与决策能力就越趋近人类驾驶水平,这也是自动驾驶实现高阶泛化的关键前提。
为保障数据集的实用性与针对性,本次发布的数据集100%来自真实道路实景采集。景烁科技深入一线城市,针对早晚高峰拥堵路况、夜间低光环境、雨雪恶劣天气、逆光眩光等复杂驾驶工况开展持续路测,重点补齐极端场景与边缘案例(Corner Case)的数据短板,确保数据集能覆盖日常驾驶中各类罕见、复杂的突发状况,让算法在真实路况中更具适应性。
在数据集细分构成上,三大模块数据各有侧重,精准解决行业核心痛点:
红绿灯识别与预测一直是城市NOA落地的核心痛点之一。该数据集搭载120度广角+30度长焦双视角同步采集系统,全面覆盖直行、左转、右转、U形转弯、BRT专用灯、数字倒计时灯、行人信号灯、非机动车信号灯等全品类交通灯具。
区别于常规数据集的基础标注,本次数据集实现灯泡级精细化标注,不仅标注信号灯颜色、形状,更针对朝向、遮挡状态、镜面反光、亮度变化等细节做结构化记录,精准覆盖夜间逆光、树叶遮挡、强光反光等典型边缘场景。哪怕是倒计时数字模糊、灯泡被车辆/树木/自身遮挡、反光程度差异等细微特征,都完成精准分级标注,直接提升算法在复杂路口的通行通过率与决策准确率。
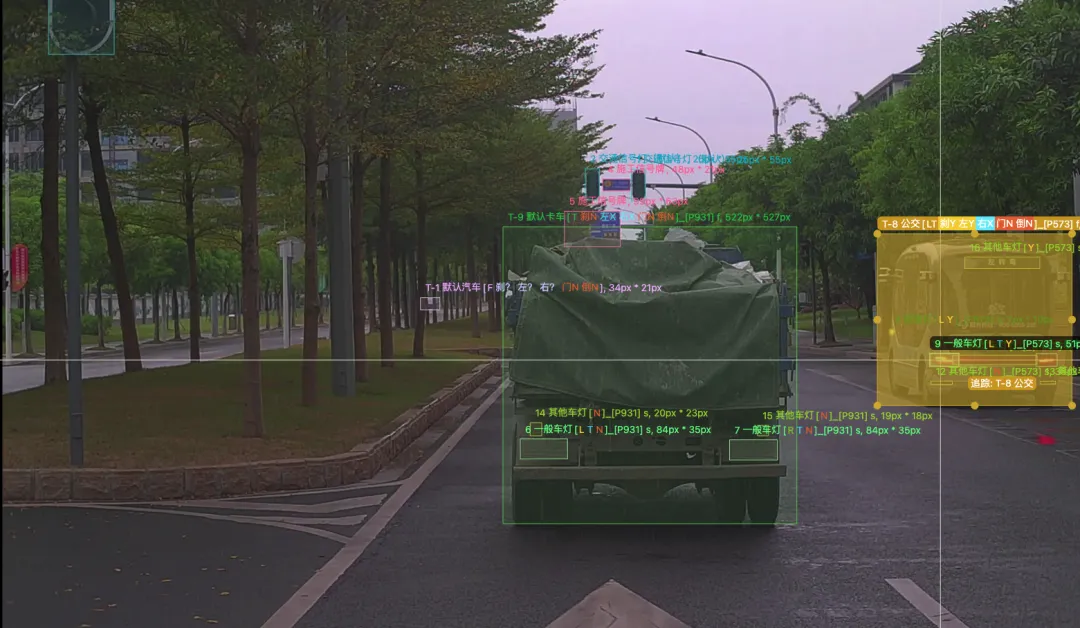
车尾灯数据:前车意图精准标注,实现从“看见”到“看懂”
跟车行驶场景中,前车意图判断是保障行车安全的关键,如同人类驾驶员依靠车尾灯预判前车动作,自动驾驶算法同样需要精细化数据支撑。数据集全面覆盖轿车、卡车、非机动车、行人、静态障碍物等全品类道路目标。
同时,数据集独创倒车属性、靠边停属性、可跨越属性等精细化标签,让算法不仅能“看见”障碍物,更能精准判断:前车是否处于倒车状态、路边停靠车辆是临时驻车还是即将起步、前方障碍物是否可安全跨越,推动算法感知能力从基础目标检测向深度意图理解升级。
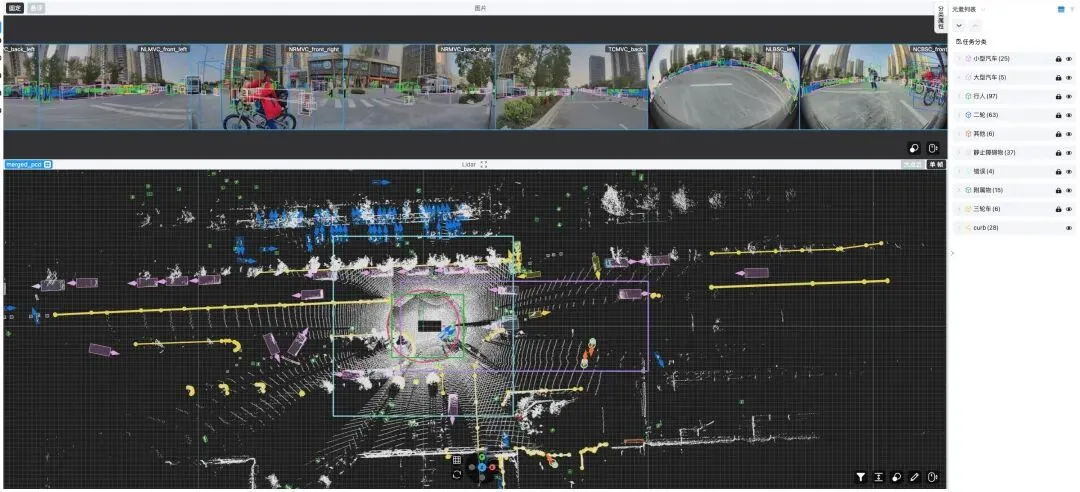
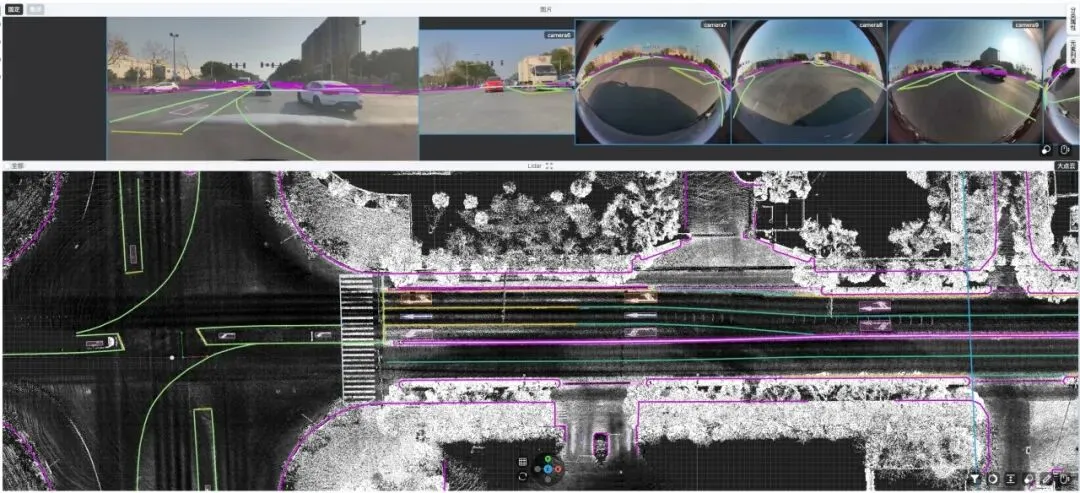
数据集配备激光雷达点云数据,作为自动驾驶3D感知的核心底座,可完美支持3D目标检测、目标距离/速度/朝向精准估计、时序目标跟踪等核心功能。景烁科技通过与图像数据实现深度多传感器融合,为L4级自动驾驶提供精准的空间感知与环境建模能力,构建起可靠的自动驾驶感知底层架构。
从实际应用成效来看,多家头部主机厂基于该数据集训练感知模型后,城市NOA功能落地速度大幅提升,累计已在100+城市推送。实测数据显示,模型红绿灯识别准确率突破99.9%+,夜间复杂场景通行成功率大幅提升,全面优化了自动驾驶在复杂城市路况中的表现。
景烁科技长期专注于自动驾驶与具身智能双场景的智能闭环研发,截至目前已累计服务20+家行业客户。此次物理AI自动驾驶数据集的发布,不仅为高阶自动驾驶研发提供了优质数据资源,更进一步完善了公司在物理AI领域的全链条布局,为自动驾驶技术的规模化落地与持续迭代注入新动能。