马斯克再放豪言:自动驾驶比人安全10倍!特斯拉车主:真实体验远比空谈更有分量!
- 2026-05-06 14:18:17


编辑 | 林芯
2026年3月29日,马斯克又在X上抛出一句话:“特斯拉的AI自动驾驶将比人类驾驶员安全10倍以上。”
10倍,到底是个什么概念?
如果FSD真比人类安全10倍,是不是意味着我们可以放心在后座睡觉?
如果只是“选择性呈现”的数据游戏,那真实的差距又有多大?
马斯克说的10倍是怎么算出来的,是真是假?
特斯拉到底做了什么,才能把事故率压到这么低?
这篇文章就帮大家剖开了来看。
01 十倍数据从何而来?
我们先把马斯克这句话里最关键的东西扒出来——那个“10倍”,到底是怎么算出来的?
答案在两份报告里。
第一份:特斯拉安全报告
特斯拉每季度都会出一份安全报告,就以2025Q1季度报告为例:
使用 Autopilot 技术的车辆平均每行驶 774 万英里(约 1076.7 万公里)才会发生一次事故
第二份:美国NHTSA的数据
根据美国国家公路交通安全管理局(NHTSA)与联邦公路管理局(FHWA)发布的报告:
美国平均每行驶70.2万英里(约113万公里)就会发生一起车祸。
然后,算一下:
744/70.2≈10.6
💡 这不是马斯克随口编的,是特斯拉官方报告里的数字。
发布周期 | 开启 Autopilot 车辆事故间隔里程 | 全美人类驾驶平均事故间隔里程 | 测算的安全倍数 |
2025 年 Q1 | 744 万英里 | 70.2 万英里 | 10.6 倍 |
2025 年 Q2 | 669 万英里 | 70.2 万英里 | 9.5 倍(接近 10 倍) |
2025 年 Q3 | 636 万英里 | 70.2 万英里 | 9.1 倍 |
02 特斯拉是怎么做到的?技术拆解
2025年4月,特斯拉副总裁陶琳分享了一段马斯克的视频。视频里马斯克说了一段话,把特斯拉自动驾驶的底层逻辑讲得很清楚:
“无论道路标线是否正确,甚至即便出现UFO降落路中央这样的极端情况,车辆都不应发生碰撞。”
这句话的核心是:避免碰撞优先于所有其他指令。
在道路交通事故中,超 90% 的诱因是人祸—— 视觉盲区、反应滞后、决策失误、疲劳分心、情绪化操作等。而特斯拉能实现10倍安全,是在【技术架构+数据收集+硬件设备】上多方面实现降维打击。
英伟达CEO黄仁勋也公开表示:“特斯拉在自动驾驶方面遥遥领先!”
技术架构
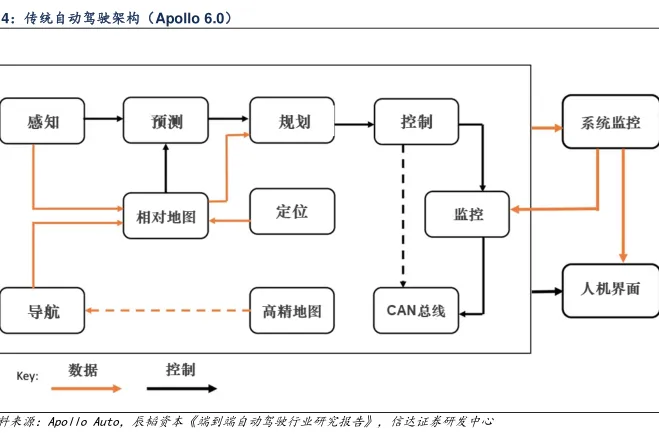
传统自动驾驶系统长什么样?
“感知→规划→控制”三个模块分开。摄像头先识别出“前面有个车”,然后把信息传给规划模块,规划模块再决定“减速”,最后控制模块执行。每传一次,信息就损耗一次。碰到不规则的物体,比如一个塑料袋飘过来,传统系统可能直接懵了——因为它的训练数据里没有“塑料袋”这个标签。
而特斯拉自FSD V12开始,彻底抛弃了这个路线。取而代之的是端到端的神经网络架构————英文叫“Photon In, Control Out”
特斯拉副总裁阿肖克・埃卢斯瓦米分享:
“自动驾驶汽车无时无刻不在面对‘微型电车难题’,通过在人类驾驶数据上进行训练,机器人得以学习与人类价值观相一致的行为准则。”
简单来说:
输入端:摄像头视频、导航信息、车速、车身姿态等所有传感器数据一股脑喂进一个巨大的神经网络。
输出端:方向盘角度、加速踏板开度、刹车力度——没了。
中间没有“感知结果传递给规划”的环节,没有人工设定的接口。神经网络自己学会“看到什么就该怎么做”。
但是端到端也面临着最大难题:维度诅咒
来算一笔账:FSD的输入端,30秒内以36Hz采集7路摄像头视频,加上导航、车速、IMU信号……总信息量
相当于数十亿个token。而输出端呢?只有两个控制信号——方向和加减速。
怎么从几十亿个输入里,稳定输出两个正确的指令?
这就是端到端最难的地方。也是特斯拉花了这么多年、烧了这么多钱才搞定的核心壁垒。
数据飞轮
1月8日,特斯拉CEO马斯克发文指出:“要实现安全、无人监督的自动驾驶,大约需要100亿英里的训练数
据。现实情况极其复杂,远超想象。”
算法再牛,没有数据也是纸上谈兵。
特斯拉最大的优势之一,就是它的车队规模。
2025年第三季度,特斯拉车主使用FSD(监督模式)单日总行驶里程超过1413万英里。
全球有400万辆特斯拉在路上跑,每一辆都在干两件事:数据采集与影子模式。
数据采集:当车主开FSD时,系统会记录下各种路况——尤其是那些“差点出问题”的场景。比如人类驾驶员突然接管了,说明AI刚才的处理可能不对;比如遇到一个奇怪的障碍物,系统会把这个片段打包传回云端。
影子模式:即使你没开FSD,系统也在后台默默运行,拿自己的决策和你的操作做对比——“刚才这个弯,我打算这么过,但车主是那么过的,哪个更合理?”
特斯拉每天能收集相当于500年驾驶时长的数据,但数据多不代表质量高。特斯拉通过用模型自动筛选高价值数据,识别“哪些片段值得回传”,然后把数据送回Dojo超级计算机里训练。
硬件配备
软件强,硬件也得跟上。
特斯拉的Autopilot硬件有几个关键设计:
8个摄像头:360度全覆盖。前视有三颗不同焦距的,兼顾远距离和广角。侧后方摄像头负责盲区。虽然特斯拉是“纯视觉”路线,但摄像头数量和布局经过精心设计,确保没有死角。
自研芯片:FSD计算单元是特斯拉自己设计的,HW4.0版本算力更强、能跑更大的模型。
冗余设计:关键模块有备份,一个出问题另一个能顶上。
固定延迟:特斯拉的神经网络推理时间是固定的——无论场景多复杂,系统都能在毫秒级内给出响应。这在自动驾驶里至关重要,保证了车辆行为的可预测性。
03 网友怎么说?——两派对立
网友的意见分为两派:力挺派和质疑派。
力挺派大多是特斯拉车主,或者长期关注自动驾驶的技术爱好者,对这套技术抱有强烈认可。他们的核心逻辑很简单:自动驾驶的官方数据就摆在那里。质疑可以,但至少得拿出另一份数据来对打。
自动驾驶的价值早已不是理论猜想,而早已经过大量数据实测:截至目前,特斯拉官网显示智能辅助驾驶已超过89亿英里。
系统能做到人类难以企及的反应速度,并规避突发障碍;在疲劳驾驶、分心走神、夜间视线不佳等人类司机高风险场景下,辅助驾驶依然能保持稳定判断;从官方统计到大量车主实测,自动驾驶介入后追尾、碰撞事故率显著下降,这些可追溯、可复现的数据,远比主观感受更有说服力。
驾驶特斯拉的车主更是直言,FDS体验感很好,这种真实安全感,远比空谈更有分量。

同样在质疑者眼里,自动驾驶就是将个人的安全交由算法,声称“人类司机永远不会出现所有人同时犯同一个错的情况,但同版本的 AI 系统会"。

04 自动驾驶未来会走向何处?
聊完了10倍从哪来、特斯拉怎么做到的、网友怎么吵的,最后一个问题绕不开:
自动驾驶的未来,到底会走向哪里?
这个问题没有标准答案。
从辅助驾驶到真正的自动驾驶,从L2到L4,差的不是一两个功能,而是一个数量级的可靠性提升。
马斯克说“自动驾驶比人类安全10倍”,这个数字本身会随着数据波动,会随着对比口径变化。但它指向的方向是明确的:自动驾驶的安全天花板,正在被一点点推高。
——好文推荐——
Anthropic凌晨“闪击”订阅用户:月付20美刀的丝滑时代,正式终结!网友绷不住:中国模型便宜50倍!无限Token的订阅模式正在失效
没卡没感情!智谱张鹏坦承GLM涨价苦衷:龙虾让推理成本涨了十倍百倍!罗福莉:算力限制催生中国极致效率!无问芯穹:infra也将智能体化
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 自动驾驶精英,正疯狂涌向具身智能机器人!
- 呼伦贝尔+阿尔山7天,全程SUV出行,5.18前报名立减300,代订机票有优惠!
- 十几米长的重卡,转弯半径竟像SUV?揭秘欧洲会扭屁股的后桥黑科技
- 马斯克:6月将首次交付MODEL Y自动驾驶汽车
- 2026年最新!大连至广州轿车托运价格大揭秘,你了解多少?
- 英菲尼迪出新SUV了,不是电车,不是加长版,也不是换壳老车.它叫QX65!
- 2026年亳州至黔南轿车托运价格大揭秘:究竟多少?
- 媒体聚焦 | 《广州日报》:自动驾驶也要“打怪升级”!
- 2026年最新!定西至吉林轿车托运价格大揭秘,你想知道多少?
- 【宜春奔驰】GLE SUV丨如何时刻保持从容
