从CES到GTC,英伟达正以前所未有的速度,将自动驾驶推向人工智能浪潮的潮头。在2026年GTC大会上,黄仁勋反复强调:“下一波人工智能的浪潮是物理AI。AI将理解物理世界的规律,而自动驾驶汽车,就是我们目前能看到的最庞大、最成熟的具身智能机器人。”
为此,英伟达不仅推出了DRIVE AV全栈自动驾驶平台,更一举携手比亚迪、吉利、五十铃、日产四大全球头部车企,并联合Uber等出行巨头,高调宣布将加速L4级自动驾驶的规模化落地。
2026年,无疑是自动驾驶领域具有分水岭意义的一年。全球科技企业正紧锣密鼓地展开新一轮角逐:Zoox在迈阿密和奥斯汀开启自动驾驶出租车测试,Arm围绕汽车与机器人业务重新梳理战略重心,小鹏汽车成立Robotaxi业务部,蘑菇车联的自动驾驶巴士登陆新加坡,轻舟智航完成亿元融资,文远知行的商业化进程全面提速……
在政策支持与技术成熟的双重驱动下,自动驾驶正于公共交通、干线物流、末端配送等细分场景全面开花。谁能率先跑通商业化闭环,谁就将重构未来的出行生态。这场关乎未来的产业竞速,其答案正随着新一轮竞赛的展开而日益清晰。
从“一级跳”到“二级跳”
回顾过往十余载,自动驾驶技术的演进轨迹清晰可见:从规则驱动、数据驱动,再到学习驱动,系统对环境的感知精度与路径规划能力虽步步为营,但其内核始终未能脱离统计模式识别与数据拟合的范畴。
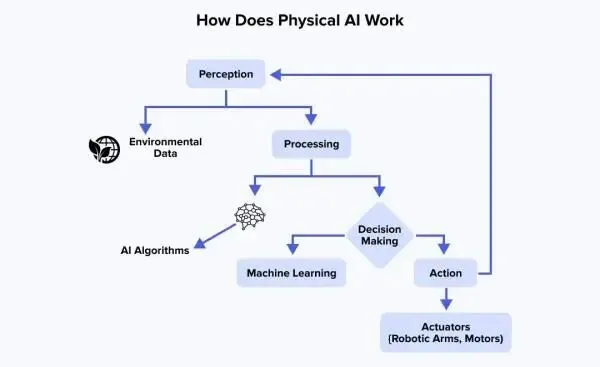
而英伟达所定义的“物理AI”(Physical AI),则开辟了一条迥异于传统学习驱动架构的全新路径。其核心要义,在于让AI深刻理解现实世界的因果关系与物理规律。通过仿真、合成数据生成与端到端模型,AI得以在虚拟的物理环境中锤炼感知、推理与行动能力,进而实现与现实世界的无缝交互。这一变革,绝非单点技术的迭代升级,而是面向真实世界应用的系统性重构,其价值尤其体现在对极端与长尾场景的卓越处理能力上。
将这一理念映射至自动驾驶领域,意味着系统不再满足于依据感知结果或模型输出直接生成控制指令,而是需要在纷繁复杂的交通环境中,敏锐识别潜在风险、审慎评估多种可能情境,并精准推演下一步行为。当面对施工区域、非常规交通行为或未曾充分覆盖的长尾场景时,系统需以接近人类驾驶员的思维方式进行推理判断,而非完全依赖海量特定场景的数据训练。
基于这一思路,自动驾驶系统正被AI重塑为一个真正的“推理平台”。其核心转变在于,从以“感知+大模型推演”为主的堆栈式架构,向“理解+推理+决策”的全新架构迁移。