嵌入式视觉:驱动农业自动驾驶拖拉机的“智慧之眼”
- 2026-04-23 00:03:59
自1837年约翰·迪尔以首台商用钢犁帮助农业实现初步机械化以来,拖拉机经历了从人工操作、部分自动化到完全自主系统的漫长演进。如今,结合人工智能(AI)与嵌入式处理平台的快速发展,自动驾驶拖拉机正成为精准农业的核心载体。然而,这场变革的催化剂并非仅是AI算法或物联网(IoT)。要让这些技术实现智能化的自动决策,首先需要获取精确的图像数据——这正是嵌入式视觉(embedded vision)发挥关键作用的舞台。
一、 从GPS到AI:自动驾驶拖拉机的技术跃迁
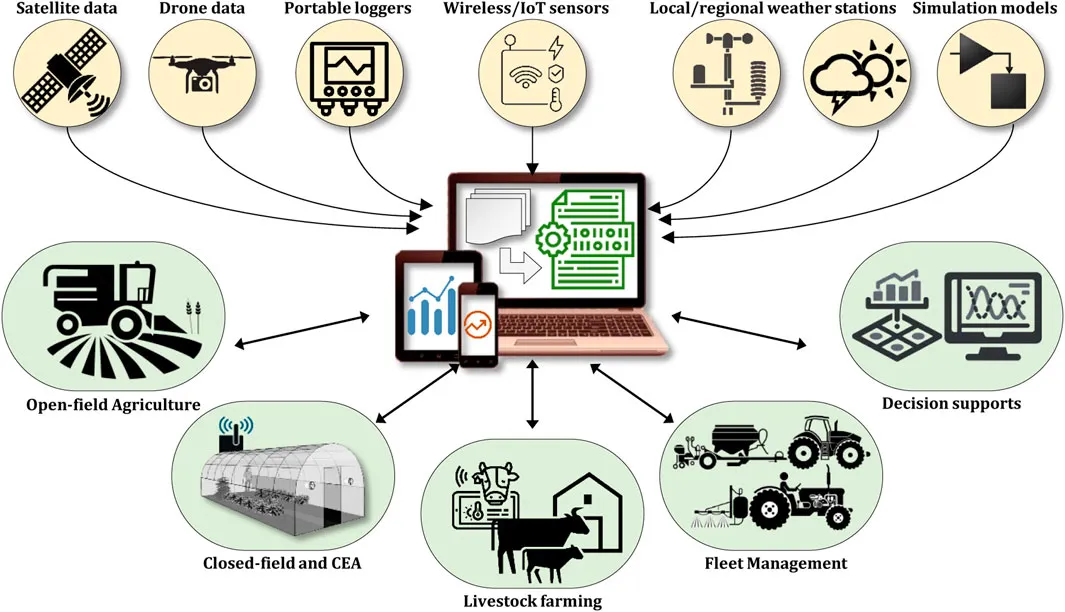
上世纪90年代,拖拉机主要依赖GPS进行导航。而今天的先进自动驾驶拖拉机,则融合了计算机视觉、遥测技术、深度学习算法以及基于云的移动应用。它们利用激光雷达(LiDAR)和深度相机等技术来感知环境、测量距离,从而在无需人工干预的情况下自主行进。
更重要的是,相机系统能够持续收集关于植物生长、杂草分布、病害、营养缺乏和虫害等多维度数据。这些数据被上传至云端应用程序,通过机器学习和深度学习算法进行分析,生成如归一化差异植被指数(NDVI) 等关键指标,用以评估作物健康状况。分析结果既会呈现在供农民查看的移动应用仪表盘上,也会直接反馈给拖拉机,指导其执行精准作业。
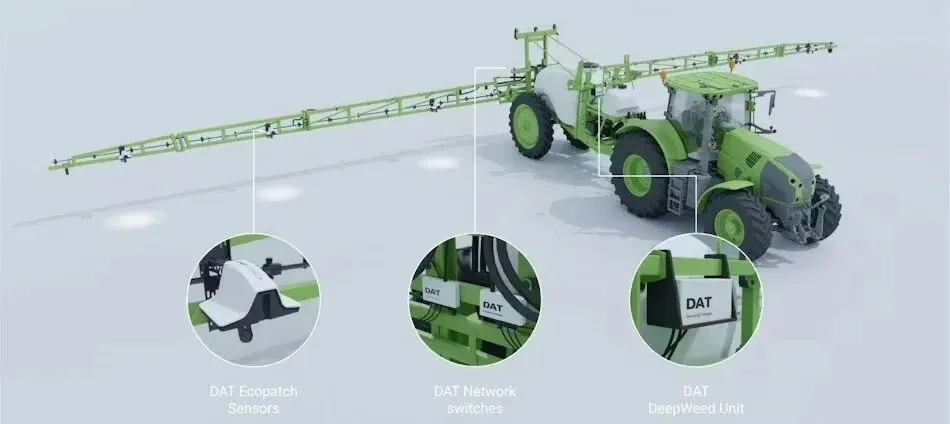
例如,拖拉机可以依据视觉分析结果,仅对植株的特定患病部位进行高精度农药喷洒,或根据土壤与作物需求变量施肥。这一切都建立在嵌入式视觉系统提供的实时、准确图像信息基础之上。

二、 嵌入式相机的四大核心功能
在自动驾驶拖拉机中,相机主要承担四大类任务:
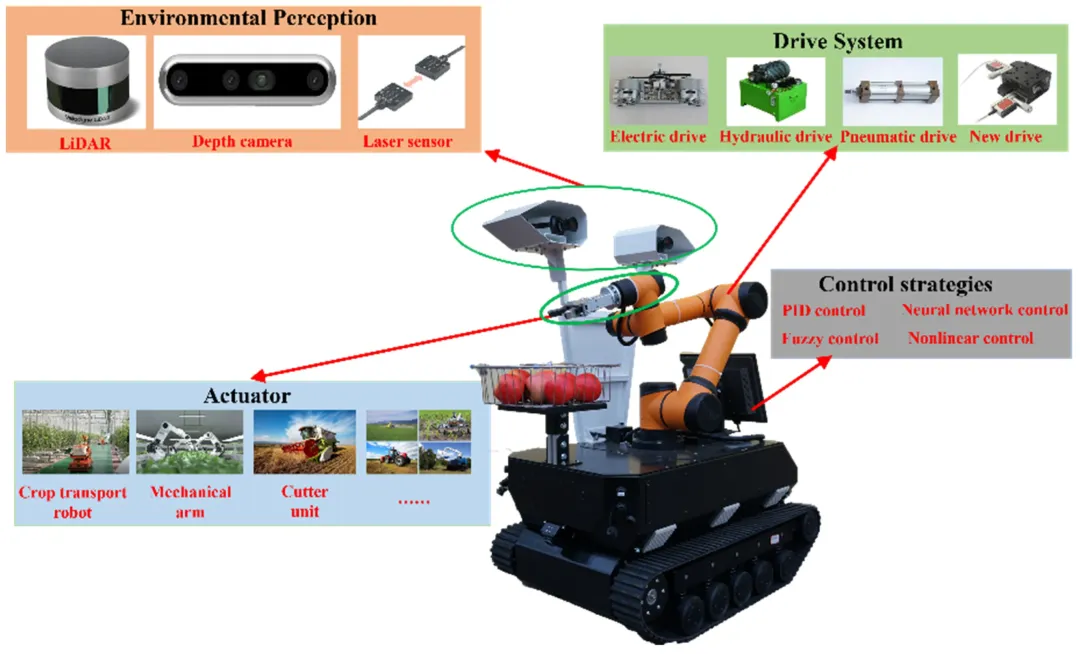
深度感知与导航:用于测量距离、实现导航和精确定位。当探测范围在10米以内时,立体相机、飞行时间(ToF)相机和结构光相机是比昂贵激光雷达更具成本效益的解决方案。立体相机使用两个传感器构成视差,而后两者则利用光照明技术来测算深度。
障碍物与人员检测:为确保田间作业安全,防止人员靠近动力输出装置等危险区域,拖拉机后端会安装相机,用于实时检测附近的物体或人体,并识别与设备连接的农具类型。
视频流传输与监控:为农民提供持续的田间监控画面,使其能够远程观察作物生长与田间状况。根据具体需求,可以选择具备相应特性的相机模块。
高细节图像捕获与分析:为精确测量作物生长和检测细微问题,需要相机能捕获高细节度的图像。在拖拉机高速移动可能导致“滚动快门”畸变的场景下,全局快门相机是更优的选择,它能有效避免运动模糊。

三、 系统挑战与相机选型要点
为自动驾驶拖拉机构建完美的视觉系统面临独特挑战,通常没有单一相机能满足所有需求,往往需要组合使用深度相机和环视相机。一台现代自动驾驶拖拉机内部可能集成多达48个相机。在选择相机解决方案时,需综合考虑以下关键特性:
深度感知能力:根据作业范围(是否超过10米)决定采用激光雷达或前述的立体/ToF/结构光相机。
高分辨率:如需捕获叶片纹理、虫害细节等微小特征,则需要支持数字变焦等功能的高分辨率相机模块。
高动态范围(HDR):应对户外强烈的明暗对比(如树荫下与阳光直射处),HDR相机能同时保留场景最亮与最暗区域的细节。
远距离传输:由于拖拉机体型庞大,相机常需远离主机处理器安装。
多相机同步与外部触发:支持多相机同步和外部触发功能,可实现对多个相机操作的精准协同控制。
与边缘AI处理器兼容:相机需能与主流的边缘AI计算平台(如NVIDIA Jetson、NXP i.MX系列、Google Coral、树莓派等)良好兼容,以支撑复杂的实时图像分析与AI推理。
全局快门与高帧率:在快速移动中避免畸变和模糊,全局快门和高帧率(配合低曝光时间)相机至关重要。
坚固性与环境适应性:拖拉机常在恶劣环境中作业,采用具备IP防护等级(如IP67)外壳的相机,能有效防尘防水。
值得注意的是,并非所有自动驾驶拖拉机都需要具备上述全部特性的相机。最终的选择取决于具体的应用场景、功能需求和作业环境。
四、 结语:看见未来田野
嵌入式视觉系统如同为自动驾驶拖拉机装上了“智慧之眼”,使其能够感知、理解并智能响应复杂的农田环境。从深度导航、安全避障到精准农事操作,相机捕获的数据是整套AI决策链条的起点。随着相机技术与AI算法的不断进步,未来的自动驾驶拖拉机将变得更加智能、高效与可靠,持续推动农业向更精准、更可持续的方向发展。

