一篇讲清楚“测试模块”的核心价值(建议收藏)
在自动驾驶系统中,如果说:
那么测试模块解决的,是一个更底层但同样关键的问题:
这套系统,是否真的可以安全、稳定地运行?这篇文章只做一件事——把自动驾驶测试模块的核心逻辑与工作内容拆解清楚。
一、测试在系统中的位置
自动驾驶系统可以拆解为:
感知 → 规划 → 控制 → 测试
其中:测试并不是一个独立的“功能模块”,而是贯穿整个系统生命周期的验证环节。
可以把测试理解为:系统的“质量保障机制”。
二、测试的核心目标是什么?
可以用一句话概括:
验证系统在各种场景下是否安全、稳定、可控。
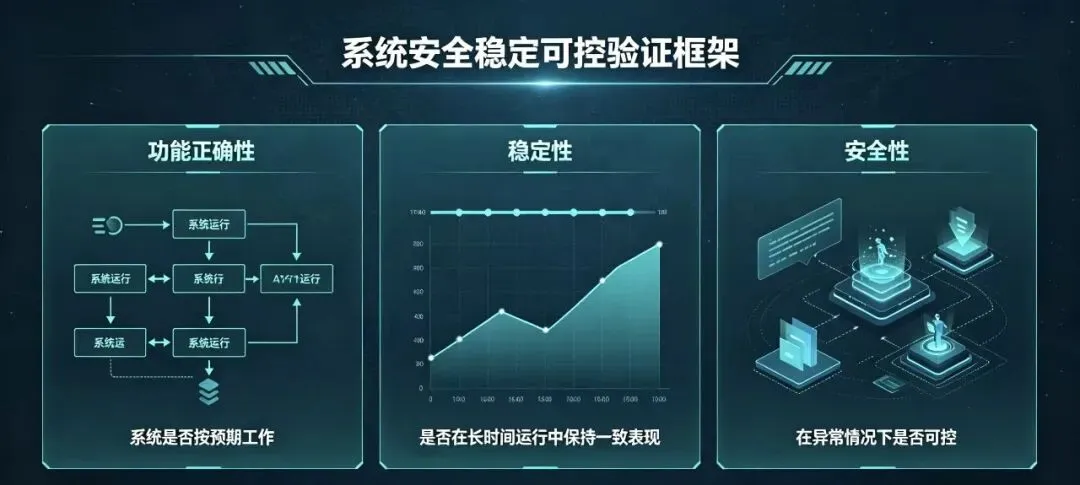
这里包含三个关键维度:
功能正确性:系统是否按预期工作
稳定性:是否在长时间运行中保持一致表现
安全性:在异常情况下是否可控
三、测试模块具体在做什么?
从工作内容来看,测试可以拆解为三个核心方向:
功能验证 → 场景验证 → 系统验证
1. 功能验证
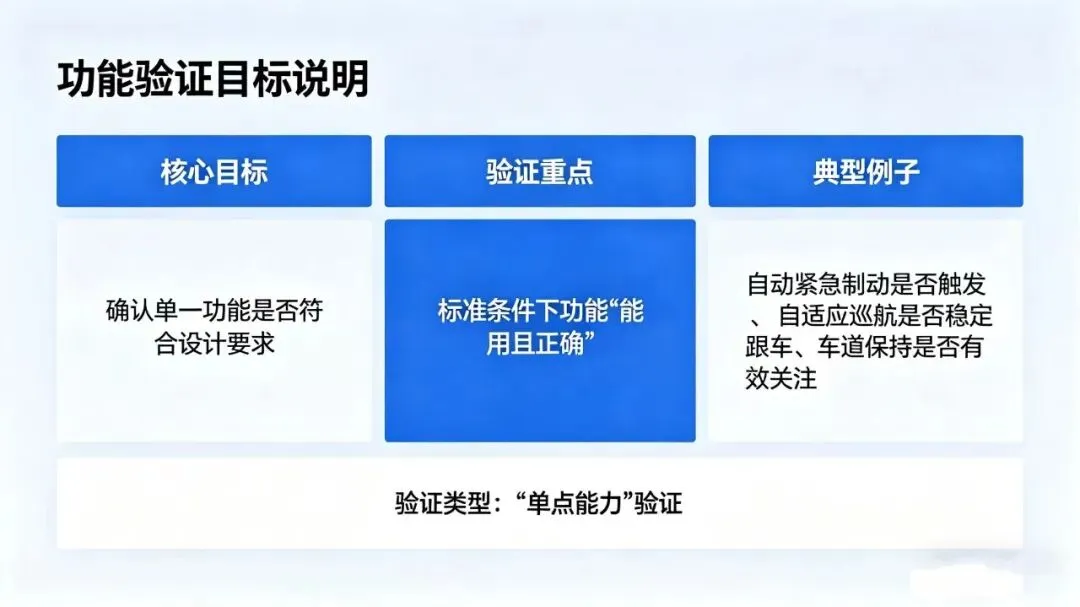
功能验证的目标是:
确认单一功能是否符合设计要求。
例如:
自动紧急制动是否能够触发
自适应巡航是否能够稳定跟车
车道保持是否有效
关注重点是:
在标准条件下,功能是否“能用且正确”。
可以理解为:对“单点能力”的验证。
2. 场景验证
真实道路环境复杂多变,因此需要通过大量场景进行验证,例如:
不同天气(雨雪、夜晚)
不同道路(城市、高速)
不同交通参与者(行人、非机动车)
其中一类重点是:
边缘场景(Corner Case)
这些场景出现频率低,但风险高,往往决定系统的安全上限。
可以理解为:对“复杂环境适应能力”的验证。
3. 系统验证
自动驾驶系统由多个模块协同完成:
感知 → 规划 → 控制
系统验证关注的是:模块之间的协同是否正常。
例如:
感知结果是否被正确使用
决策是否合理
控制执行是否符合预期
可以理解为:对“整体系统行为”的验证。

四、测试是如何开展的?
根据验证环境不同,测试通常分为三种方式:
1. 仿真测试(SIL)
在软件环境中进行测试,通过构建虚拟场景验证系统行为。
特点是:
2. 台架测试(HIL)
通过硬件在环系统,将真实控制单元接入测试环境。
特点是:
3. 实车测试
在真实道路环境中进行验证,是最终测试环节。
特点是:
五、测试工程师在做什么?
从日常工作来看,测试工程师主要包括:
测试用例设计
测试执行(仿真 / 台架 / 实车)
数据记录与日志分析
问题复现与定位
Bug提交与跟踪
其中一个关键点是:
测试不仅要发现问题,还要能够复现问题并说明原因。

六、测试的难点在哪里?
相比其他模块,测试的难点更多来自“复杂性与不确定性”,例如:
1. 场景覆盖问题:真实世界场景无限多,很难完全覆盖。
2. 问题定位困难:当系统表现异常时,可能涉及多个模块,需要逐步排查。
3. 数据量巨大:自动驾驶测试会产生大量日志与数据,需要进行有效分析。
4. 跨团队协作:测试需要与算法、软件、系统等多个团队协同推进问题解决。
七、总结
可以用一个简单结构来理解测试模块:
功能验证:验证单一能力场景验证:验证复杂环境适应能力系统验证:验证整体协同能力
从系统角度来看:测试贯穿感知、规划、控制全过程,是保障系统可靠性的关键环节。
如果你正在学习自动驾驶领域,建议在理解系统结构的同时,关注测试在其中的作用,因为它直接关系到系统是否能够真正落地。





 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
