【直播视频及ppt】作业船舶自动驾驶决策控制方法及实践
- 2026-05-13 09:40:39

报告
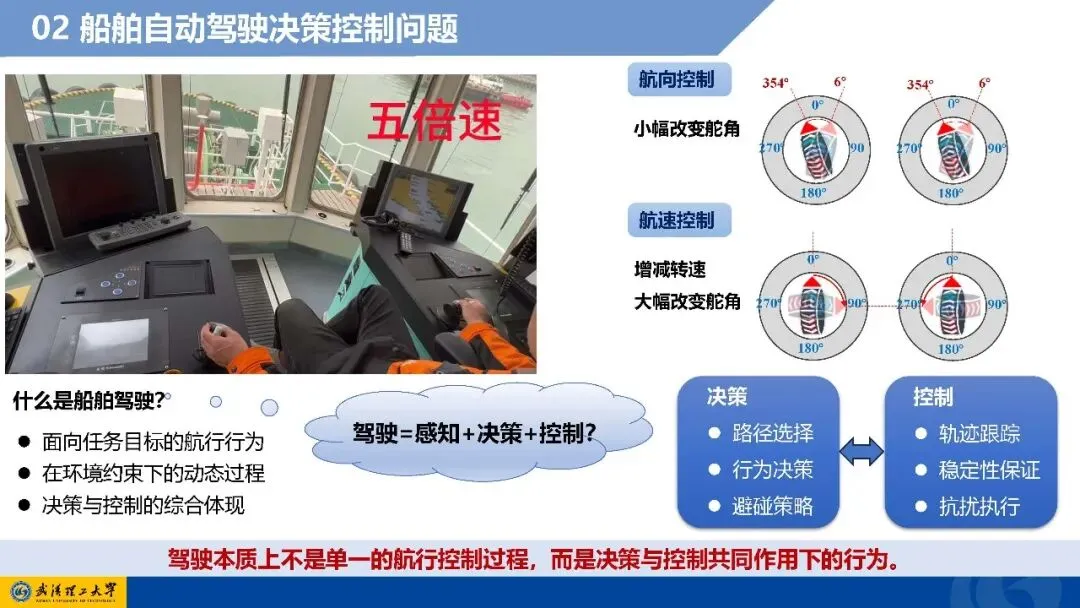
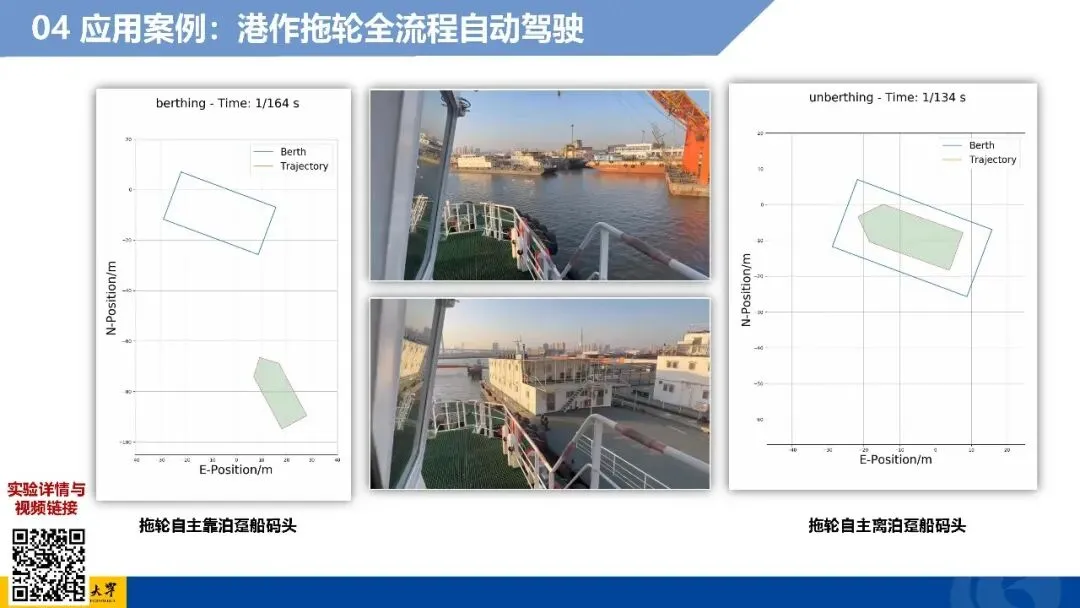
作业船舶自动驾驶决策控制方法
及实践
3月30日,《中国舰船研究》创刊20周年青年专家论坛第2期(总第13期)在线分享会——“智能船舶自主航行与决策控制技术”,在期刊视频号成功直播。大连海事大学关巍教授和武汉理工大学李诗杰副教授担任主讲嘉宾,分别针对“智能船舶全局路径规划与自主行为决策研究”和“作业船舶自动驾驶决策控制方法及实践”主题做了精彩分享。
在此奉上李诗杰副教授的直播视频和报告ppt,敬请观看!
李诗杰副教授直播问题回复(点击链接查看)

相关文献(点击查看):
[1] 李诗杰, 刘泰序, 刘佳仑, 等. 基于MPC-IMFAC的船舶路径跟随控制方法研究[J]. 中国舰船研究, 2025, 20(1): 317–325.
[2] 李诗杰, 何家伟, 刘佳仑, 等. 基于L1-GPR的船舶航向航迹控制方法研究[J]. 中国舰船研究, 2025, 20(1): 278–288.
[3] 李诗杰, 徐诚祺, 刘佳仑, 等. 船舶自抗扰无模型自适应航迹控制[J]. 中国舰船研究, 2024, 19(1): 280–289.
[4] 刘佳仑, 董智霖, 李诗杰, 等. 基于改进反步滑模控制算法的拖轮自主靠泊控制[J]. 中国舰船研究, 2024, 19(1): 119–127.




相关文献(点击查看):
[1] 李诗杰, 刘泰序, 刘佳仑, 等. 基于MPC-IMFAC的船舶路径跟随控制方法研究[J]. 中国舰船研究, 2025, 20(1): 317–325.
[2] 李诗杰, 何家伟, 刘佳仑, 等. 基于L1-GPR的船舶航向航迹控制方法研究[J]. 中国舰船研究, 2025, 20(1): 278–288.
[3] 李诗杰, 徐诚祺, 刘佳仑, 等. 船舶自抗扰无模型自适应航迹控制[J]. 中国舰船研究, 2024, 19(1): 280–289.
[4] 刘佳仑, 董智霖, 李诗杰, 等. 基于改进反步滑模控制算法的拖轮自主靠泊控制[J]. 中国舰船研究, 2024, 19(1): 119–127.
李诗杰副教授简介

李诗杰,武汉理工大学交通与物流工程学院副教授、博士生导师。主要从事船舶自动驾驶决策控制研究。主持国家自然科学基金青年项目、国家重点研发计划课题等科研项目,获中国智能交通协会技术发明二等奖、中国物流与采购联合会科技进步二等奖。发表SCI论文40余篇,授权发明专利30余项。
END
往期精彩回顾
【分享会ppt】上海交通大学王鸿东教授:无人舰艇操纵运动深度学习建模方法探索与应用
【直播视频及ppt】华中科技大学程远胜教授:数据与知识融合驱动的船舶优化设计方法
中国舰船研究
Chinese Journal of Ship Research
联系我们:
编辑部微信号:zgjcyjbjb
网站:www.ship-research.com
邮箱:cjsr@ship-research.com
电话:027-65235554/027-65232570
EBSCO收录期刊 Inspec收录期刊 Scopus收录期刊 JST 收录期刊 DOAJ收录期刊 CSCD核心期刊 中文核心期刊 RCCSE中国核心学术期刊 中国精品科技期刊 中国科协高质量科技期刊 T1级 湖北省最具影响力学术期刊 湖北十大名刊 |  微信公众号二维码  微信视频号二维码 |
欢迎分享到朋友圈✬ 评论功能现已开启, 接受一切形式的吐槽和赞美
核心期刊《中国舰船研究》学术论文免费检索、阅读
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 上海到常州轿车托运,长三角同城互运攻略
- 零跑D19太猛了!22万起的全尺寸SUV,到底香不香?
- 越级锋尚大五座SUV
- 小鹏最贵SUV开卖,39.98万,L4架构3000TOPS算力,座椅支持“三折叠”
- 把旗舰SUV价格打下来!零跑D19售21.98万起,双腔空悬+CDC减振兼顾舒适操控
- 智己LS8的线控四轮转向,为什么是大型SUV的“解药”
- 广州到南昌轿车托运|广州到南昌物流公司 南昌到广州汽车托运
- 广州到九江轿车托运|广州到九江物流专线 九江到广州轿车托运
- 长城哈弗H10正式定名 品牌旗舰SUV定位硬派新能源
- 【鲁南沿海】广州到日照轿车托运 广州到日照物流公司 鲁南沿海
