联想与文远知行L4级自动驾驶域控制器拆解,L2/L4差别在哪?
- 2026-05-13 07:58:14
文远知行无人出租车
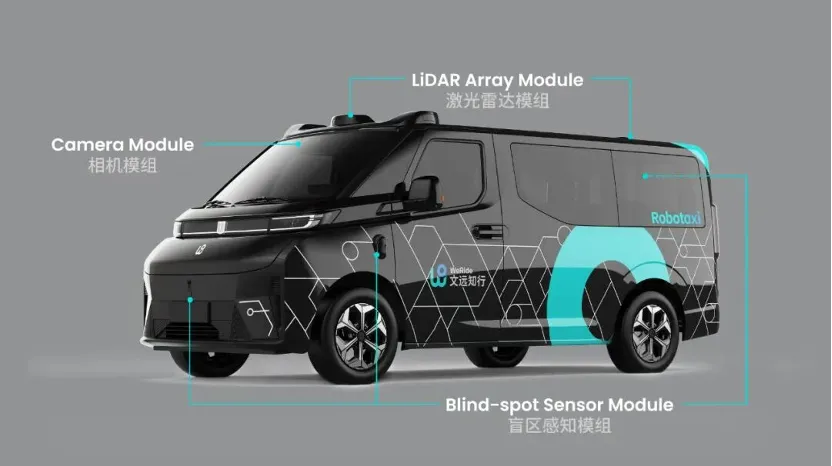
图片来源:文远知行
早在2023年底,联想和文远知行以及英伟达就在紧密合作,将Thor-X搬上L4级无人出租车,2024年7月便完成了域控制器AD1的开发,联想和中国台湾仁宝合资的合肥联宝负责贴片生产,整板1.6万个点位,近万元件,3900个BGA植球,难度远超L2级域控制器。特斯拉HW4不过7千个点位左右,近五千元件。
AD1智能驾驶域控制器

图片来源:网络
AD1是联想针对L4级无人驾驶行业所设计研发的,并在全球范围内首款采用全车规元器件的智能驾驶域控制器。其产品性能和研发进度遥遥领先——全球首次搭载NVIDIA DRIVE AGX Thor-X平台,比任何厂家都提前两年,拥有2000TOPS超高AI算力与集成效率,基于SPECrate 2017评估的CPU算力值达到174分,同时,叠加适配联想自研AI中间件UltraBoost。
AD1共获得5 项已实审发明专利:包括①一种异构系统动态调用不同芯片处理器的方法、②一种车载中央计算单元快装结构设计、③一种多时间域的时间同步方法及系统、④一种基于VLAN/ARP的复杂车载系统以太网EMC测试方案以及⑤一种应用于高热流密度芯片的液冷板。
同时,通过域控制器电源冗余解决方法等实用新型专利,形成从硬件架构到系统安全的立体化专利矩阵。
首先要分清联想用的Thor-X和极氪、理想、智己上的Thor-U的区别。
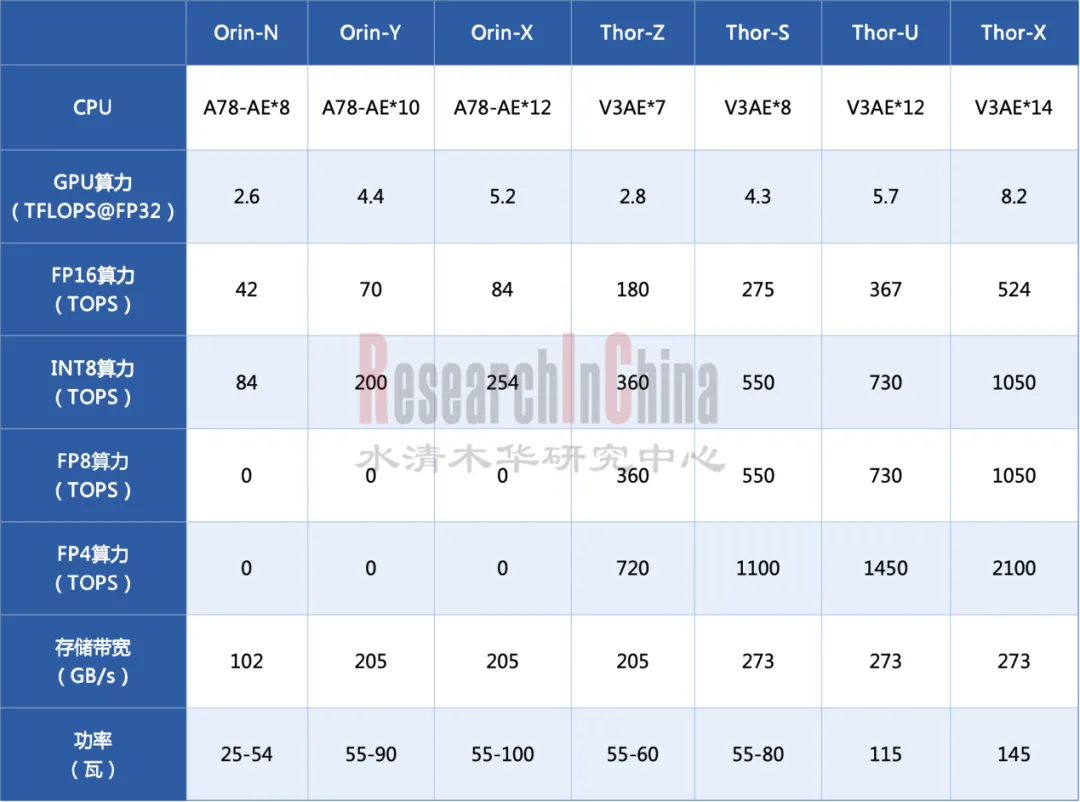
整理:北京水清木华研究中心
Thor-X比Thor-U强很多,英伟达的Jetson AGX Thor T5000用的也是Thor-X。

Thor-X的型号是TA1090-SA,有些早期Thor-X会标明CUSTSAMPLE,这是为联想订做的样品。

Thor-U的型号TA1080SA,ENG代表工程版。
图片来源:闲鱼
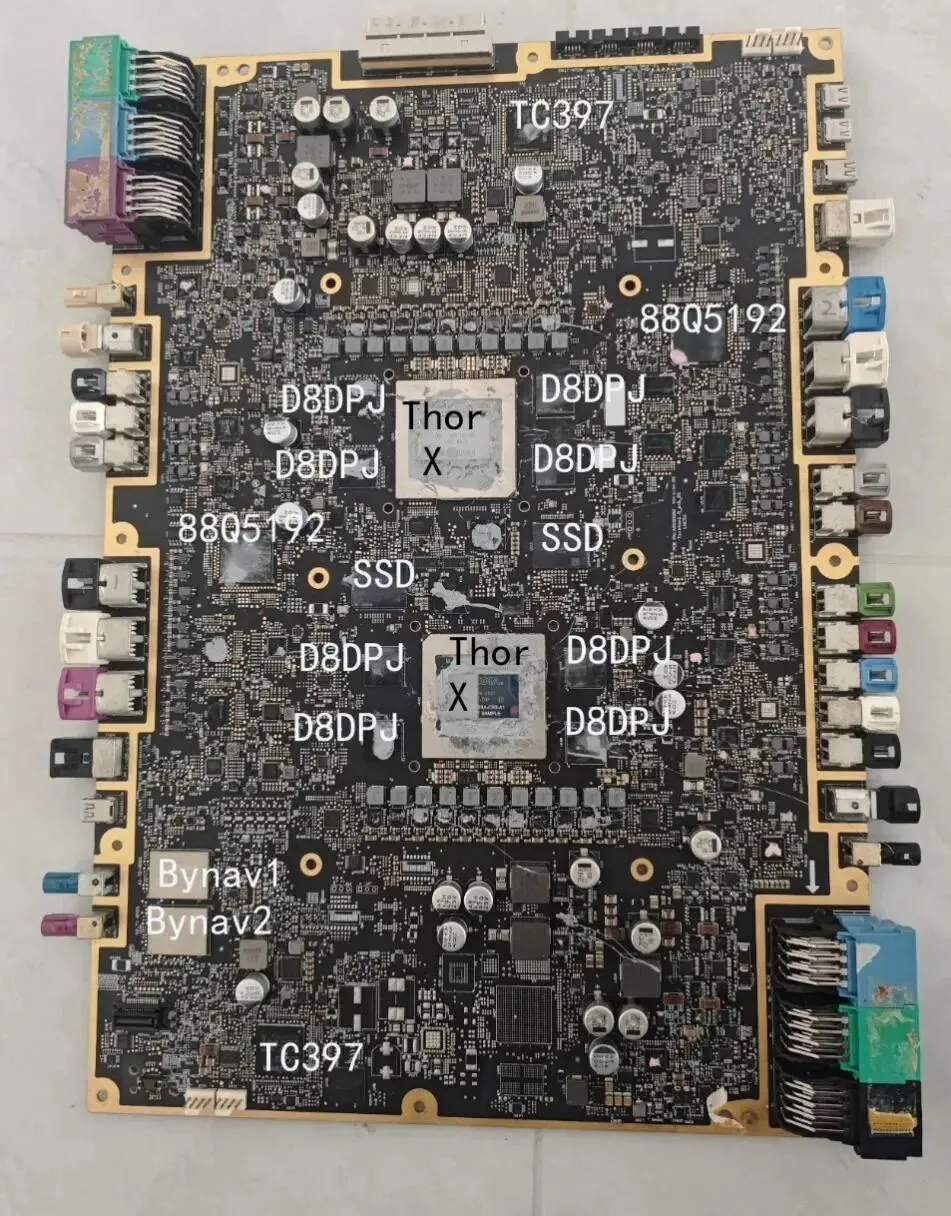
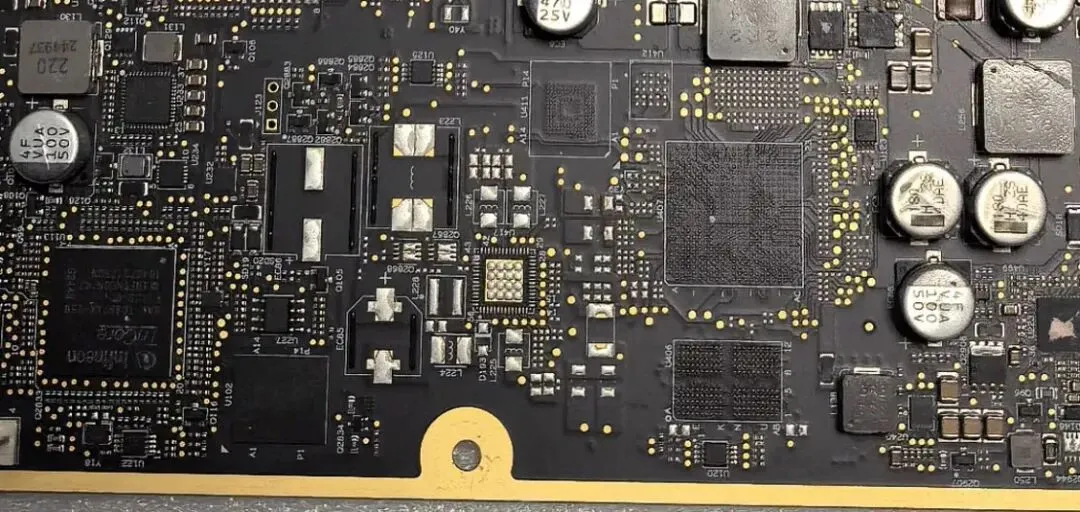
笔者添加了元件标注。AD1考虑多种冗余策略:在供电上,AD1采用双独立备份供电,在一路电源失效情况下,另一路电源仍可以保证域控正常工作;在传感器接入上,除了给摄像头独立供电以外,不同Thor SoC间摄像头可相互接入,在一个Thor SoC失效情况下,仍能保证一定功能的运行。这些不是L2/L4的主要区别,不少L2系统也有冗余。
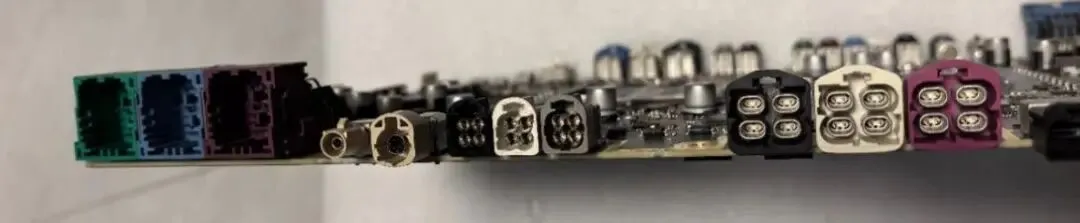
控制器一侧接口,可以看到有12个以太网接口。联想还使用了4片英飞凌的以太网物理层芯片,要知道88Q5192有12个端口已经集成了物理层芯片,这相当奢侈。推测用了4个激光雷达,盲区感知模块可能是固态补盲激光雷达,有4-6个,毫米波雷达估计有1-3个。
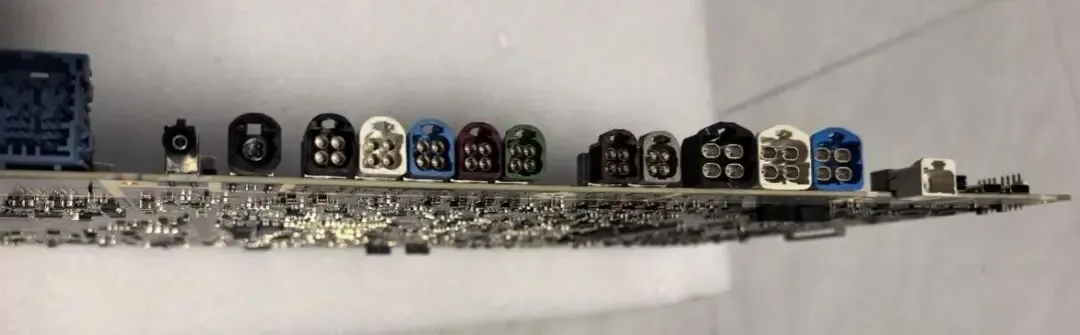
控制器另一侧接口,可以看到这一侧最多能接多达24个摄像头,当然如果分辨率高就接不了这么多。摄像头估计有10个,估计800万像素有2-5个,每个800万像素要占至少2个lane。从解串行芯片放置的方式看,应该是德州仪器的解串行芯片,ADI的通常都要求非水平放置,解串行芯片的数量大致是5-6个。推测800万像素五个,300或400万像素四个,一个车内的300万到400万像素摄像头。
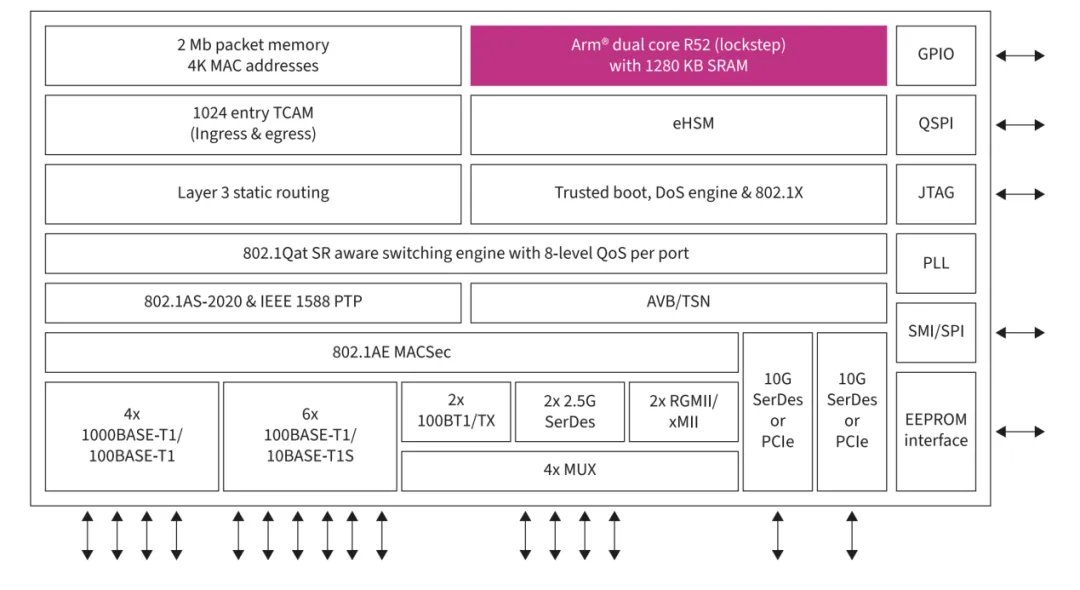
L2/L4最大区别是对速度的追求,联想这个AD1大量使用PCIe而非L2系统常用的以太网。首先是两个Thor-X的连接,使用了88Q5192这款英飞凌(前Marvell车载事业部)端口数最多的以太网交换机。
88Q5192内部框架图
图片来源:网络
88Q5192的内部框架图见上,拥有多达16个端口,包含两个PCIe端口,这让88Q5192等同于一个微型PCIe交换机,AD1使用了两个88Q5192,等于是一个4口的PCIe交换机。
图片来源:网络
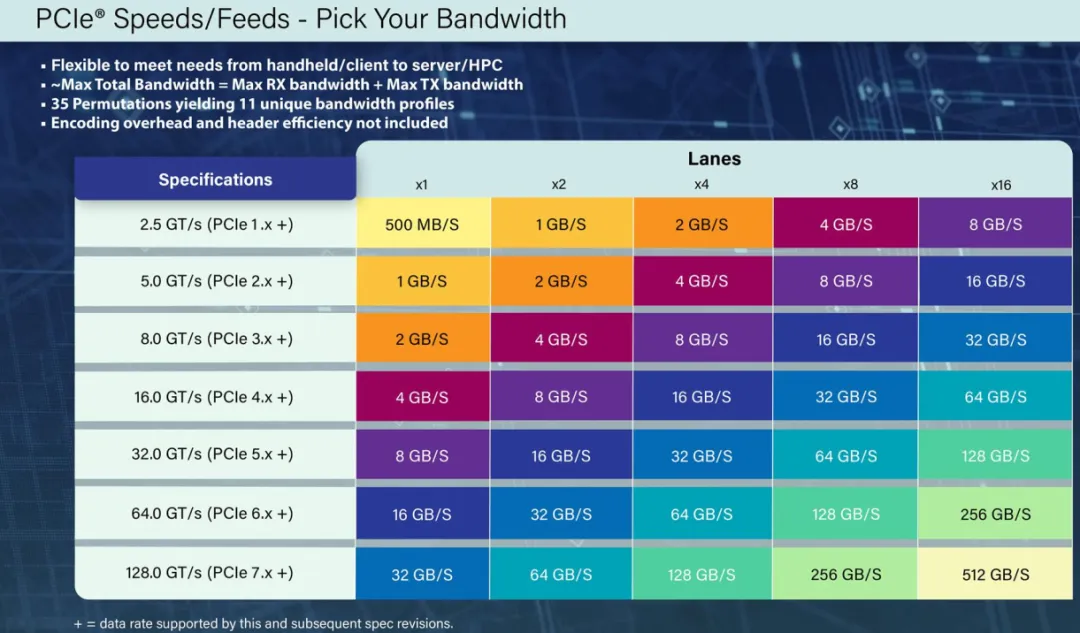
PCIe速率表,大写的B是小写b的8倍,虽然88Q5192是2010年的PCIe 三代标准,但仍比目前最先进的以太网交换机要快数倍,最低也有16Gb/s的速率,而通常SoC、外设以及以太网交换机都不超过5Gb/s。

因为使用了PCIe,所以关键的存储器件换成了SSD,L2级自动驾驶则全部是UFS,这也是第一次在汽车领域使用SSD,联想使用了美光的车规级SSD,即4150AT。
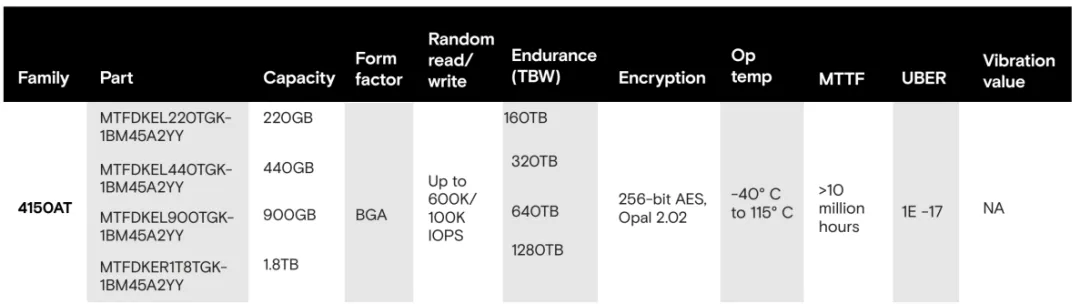
4150AT系列有4款,联想选择了900GB那款,目前车载领域最多也就是256GB/s。其随机读出速度是600K IOPS,也就是2457MB/s,随机写入速度是100K IOPS,即409MB/s,而目前车载领域最先进是UFS3.1,随机读出速度大约63-68K IOPS,远低于SSD。峰值读出速度,4 lane PCIe的SSD是3600MB/s,UFS3.1是2100MB/s。
LPDDR倒是与L2系统一样,也是比较常见的D8DPJ,这是一款16GB的LPDDR5X,8533Mbps,联想用了8片,L2系统一般2-3片足够。
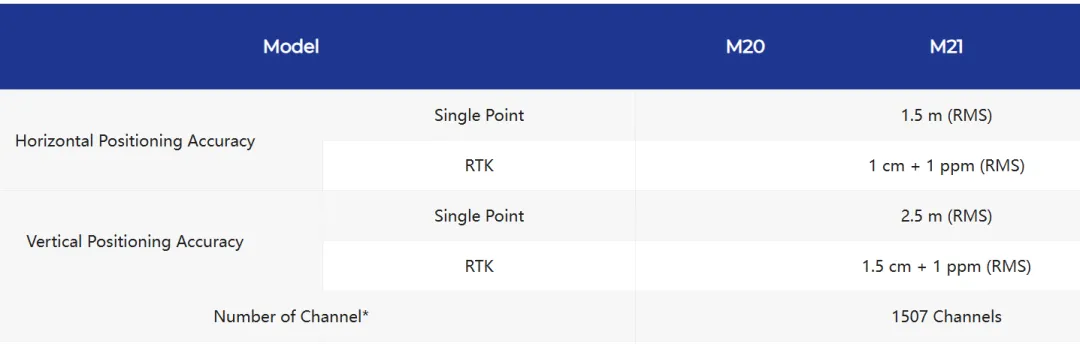
定位系统是两片北云科技的M2模组,性能远超L2系统,也远超特斯拉的HW4.0。
北云科技M2模组性能
图片来源:网络
特斯拉自然也是知道定位的重要性,HW3.0使用了u-blox的M8L做GPS定位,没有单独外置的IMU,定位精度与一千元的手机差不多。HW4.0的定位系统相比HW3.0可谓相当豪华,GNSS前端是意法半导体的STA5635A,价格约3-4美元,信号接收处理是意法半导体的STA8100GA,价格约7.2美元,IMU是意法半导体的ASM330LHH,价格是5.9美元。但和北云科技M2还是差得很多,特斯拉的HW4.0定位精度大约0.1-0.44米,北云科技M2在RTK加持下可以做到0.01米。
AD1域控制器下部局部
图片来源:闲鱼
上图是AD1域控制器下部局部,这里留了五个芯片的空位,应该是准备做网关的,中间最大的推测是主芯片,可能是NXP的S32G398/399,主芯片下面预留的空位是给LPDDR5X的,为S32G398/399服务,容量1-4GB,左上边的三个空位,一个是留够QSPI NorFlash做快速启动的,一个是ASIL-D级SBC芯片如VR5510,还有一个eMMC,容量可能在32-64GB之间。
联想的这款L4自动驾驶域控制器一开始就是奔着大规模量产上车设计的,与座舱和T-BOX的连接也考虑在内,同时也是目前量产级别最先进的自动驾驶域控制器,没有之一。
免责说明:本文观点和数据仅供参考,和实际情况可能存在偏差。本文不构成投资建议,文中所有观点、数据仅代表笔者立场,不具有任何指导、投资和决策意见。
更多报告
| AI机器人 | ||
AI机器人 | ||
| 云端和AI | ||
| 车云 | ||
| 动力层 | ||
| 动力 | 混合动力报告 | |
| 800-1000V高压平台 | 电驱动与动力域研究 | |
热管理 | ||
其他 |
| 电子电气架构层 | ||
| E/E架构框架 | E/E架构 | 汽车电子代工 |
| 48V低压供电网络 | ||
| 智驾域 | 自动驾驶SoC | |
| 座舱域 | 座舱域控 | |
| 车控域 | 车身(区)域控研究 | |
| 通信/网络域 | ||
| 跨域融合 | ||
| 其他芯片 | ||
| 车载存储芯片 |
| 智舱系统集成和应用层 | ||
智能座舱应用框架 | 座舱设计趋势 | |
自动驾驶算法和系统 |
| OS和支撑层 | ||
| SDV框架 | SDV:软件定义汽车 | |
信息安全/功能安全 |
| 其他宏观 | ||
| 车型平台 | 车企模块化平台 | |
| 政策、标准、准入 | 智能辅助驾驶法规和汽车出海 |
「AI与机器人月报」
「联系方式」
手机号同微信号
产业研究部丨赵先生 18702148304
推广传播部|杜先生 13910162318

