在自动驾驶技术从 L2 向 L3、L4 跨越的关键阶段,定位系统的精度、连续性和可靠性已经成为决定自动驾驶功能安全的核心要素。
单一的卫星定位或惯性导航已经无法满足高阶自动驾驶的需求。融合定位通过整合卫星、IMU、视觉等多源传感器信息,成为了高阶自动驾驶的 "标配"。然而,长期以来,车载融合定位行业缺乏统一的国家标准,各企业技术路线各异、性能指标混乱、试验方法不统一,导致产品质量参差不齐,给主机厂选型集成和行业监管带来了极大挑战。
近日,由工业和信息化部提出、全国汽车标准化技术委员会归口的GB/T 45086.3《车载定位系统技术要求及试验方法 第 3 部分:融合系统》国家标准(征求意见稿)正式发布。
这是我国首个专门针对车载融合定位系统的国家标准,由浙江吉利控股集团、德赛西威、中汽中心牵头,联合广汽、一汽、南京航空航天大学、上汽通用五菱、东风日产、均联智行、中国汽研、引望智能、百度阿波罗、速腾聚创、高通、大众中国、北斗智联、北汽福田、远程新能源、博世、导远电子、航盛电子等28 家产业链头部企业和科研机构共同起草。
这标志着我国车载融合定位行业正式进入标准化、规范化发展的新时代,为 L3 及以上级别自动驾驶的大规模量产奠定了坚实的技术基础。
本文将为汽车技术工程人员深度解读这份重磅标准的核心内容,全面解析自动驾驶融合定位的技术门槛、试验方法和行业影响。
一、标准概况:构建完整的车载定位标准体系
本标准是 GB/T 45086《车载定位系统技术要求及试验方法》系列标准的第 3 部分,该系列标准构建了车载定位系统完整的标准体系:
第 1 部分:卫星定位
第 2 部分:惯性测量单元
第 3 部分:融合系统
1.1 起草单位阵容空前强大
本标准的起草单位涵盖了车载融合定位产业链的各个环节,确保了标准的科学性、先进性和实用性:
整车企业:吉利、广汽、一汽、上汽通用五菱、东风日产、大众中国、北汽福田、远程新能源
核心供应商:德赛西威、均联智行、引望智能、百度阿波罗、速腾聚创、高通、博世、导远电子、航盛电子、北斗智联
高校科研机构:南京航空航天大学
检测机构:中汽中心、中汽智能、中国汽研、襄阳达安、招商局检测
1.2 适用范围明确
本标准适用于至少有卫星 (北斗优先)、惯性测量单元、视觉组合的车载融合系统,安装有融合系统的 M、N 类汽车。其他类型车辆可参考执行。
这一规定明确了融合系统的最低传感器配置要求,即必须包含 "卫星 + IMU + 视觉" 三要素,这也是当前高阶自动驾驶融合定位的主流技术路线。
二、核心技术要求详解:定义 L3 + 融合定位硬指标
本标准从一般要求、性能要求和场景要求三个维度对车载融合系统提出了全面的技术规范。
其中性能要求是核心,直接决定了融合系统的定位精度和可靠性。
2.1 一般要求
标准规定融合系统必须具备以下基本能力:
定位定姿能力:在规定的 ODD 具备输出位置、速度、航向、姿态信息,以及输出自车位置与车道线、交通标识物间的相对横纵向距离,自车航向与车道线夹角信息的能力
自检能力:启动后检查相关传感器件是否正常运行,检查相关通信链路是否正常通信
警示能力:在自检及运行期间发生故障时,给出区别于其他系统的故障指示信息
2.2 核心性能指标:13 项指标全面考核
标准对融合系统的定位性能提出了13 项核心指标要求,这些指标是衡量融合系统性能的 "金标准"。
表 1 定位性能要求
指标类型 | 项目 | 性能指标 |
地理坐标系 | 位置精度 | 水平:≤ 0.3 m 高程:≤ 0.8 m |
| 速度精度 | ≤ 0.2 m/s |
| 航向精度 | ≤ 0.5° |
| 姿态精度 | 俯仰:≤ 0.5° 横滚:≤ 0.5° |
| 位置漂移 (GNSS 失效) | ≤ 3‰ × 行驶里程 (测试时间 60s) |
| 速度漂移 (GNSS 失效) | ≤ 0.3 m/s (测试时间 60s) |
| 航向漂移 (GNSS 失效) | ≤ 0.5°(测试时间 60s) |
车体坐标系 | 横向精度 (相对车道线) | ≤ 0.5 m |
| 纵向精度 (相对标识物) | ≤ 2 m |
| 航向精度 (车道线切线夹角) | ≤ 2° |
其它指标 | 首次定位时间 | < 60 s |
| 定位重收敛时间 | < 20 s |
| 数据更新率 | ≤ 50 Hz |
注:地理坐标系和车体坐标系的性能指标圆概率误差为 CEP95
关键指标深度解读:
水平位置精度≤0.3m:这是 L3 级自动驾驶的基本要求。0.3m 的精度意味着车辆能够准确识别自己在车道内的位置,确保车辆始终行驶在车道中央。
GNSS 失效 60s 位置漂移≤3‰:这是隧道、城市峡谷等卫星信号丢失场景下的关键指标。以 100km/h 的速度行驶 60s,车辆行驶距离约为 1667m,3‰的漂移意味着位置误差不超过 5m,能够保证车辆在长隧道内的安全行驶。
横向精度 (相对车道线)≤0.5m:这是车道保持功能的核心指标。0.5m 的精度确保了车辆不会偏离车道,避免与相邻车道的车辆发生碰撞。
纵向精度 (相对标识物)≤2m:这是自动跟车、自动刹车等功能的关键指标。2m 的精度确保了车辆能够准确识别与前方车辆、交通信号灯、停止线等的距离。
首次定位时间 < 60s:这是用户体验的重要指标。车辆启动后,融合系统需要在 60s 内输出有效的定位结果,避免用户等待时间过长。
定位重收敛时间 < 20s:这是卫星信号恢复后的关键指标。当车辆驶出隧道后,融合系统需要在 20s 内重新获得高精度定位结果。
2.3 场景要求:覆盖所有典型自动驾驶场景
标准规定了融合系统性能测试的5 个必测场景和5 个选测场景,覆盖了高速公路、上下匝道、隧道、弯道、带交通标识道路等所有典型的自动驾驶场景。
表 2 试验场景和道路要素对应关系
序号 | 试验场地 | 场景要素组合 | 备注 |
1 | 高速道路 | 1-1-2-0-II &1-2-1-0-I &2-1-3-0-III&2-2-3-0-III&2-3-1-0-I&3-1-1-1-I &3-1-1-4-II | 必测 |
2 | 上下匝道 | 1-1-2-0-II &1-2-1-0-I &2-1-3-0-III&2-2-3-0-III&2-3-1-0-I&3-1-2-1-I &3-1-2-3-I | 必测 |
3 | 隧道道路 | 1-1-2-0-II &1-2-1-0-I &2-1-3-0-III&2-2-3-0-III&2-3-1-0-I&3-4-1-1-I &3-4-1-3-I | 必测 |
4 | 弯道 | 1-1-2-0-II &1-2-1-0-I &2-1-3-0-III&2-2-3-0-III&2-3-1-0-I&3-2-2-1-I &3-2-2-3-I | 必测 |
5 | 带交通标识道路 | 1-1-2-0-II &1-2-1-0-I &2-1-3-0-III&2-2-3-0-III&2-3-1-0-I&3-3-1-3-I &3-3-2-3-III | 必测 |
6 | 高速道路 | 1-1-3-0-III &1-2-2-0-II &2-1-3-0-III&2-2-3-0-III&2-3-1-0-III&3-1-1-2-II&3-1-1-4-II | 选测 |
7 | 上下匝道 | 1-1-3-0-III &1-2-2-0-II &2-1-3-0-III&2-2-3-0-III&2-3-1-0-I&3-1-2-2-II &3-1-2-4-II | 选测 |
8 | 隧道道路 | 1-1-3-0-III &1-2-2-0-II &2-1-3-0-III&2-2-3-0-III&2-3-1-0-I&3-4-1-2-II &3-4-1-4-II | 选测 |
9 | 弯道 | 1-1-3-0-III &1-2-2-0-II &2-1-3-0-III&2-2-3-0-III&2-3-1-0-I&3-2-2-2-II &3-2-2-4-II | 选测 |
10 | 带交通标识道路 | 1-1-3-0-III &1-2-2-0-II &2-1-3-0-III&2-2-3-0-III&2-3-1-0-I&3-3-1-4-II &3-3-2-4-II | 选测 |
标准还详细规定了每个场景的具体要素,包括自然环境(光照、天气)、GNSS 环境(收星数、PDOP 值、RTK 服务)和道路环境(车道线清晰度、纵向标识清晰度)。
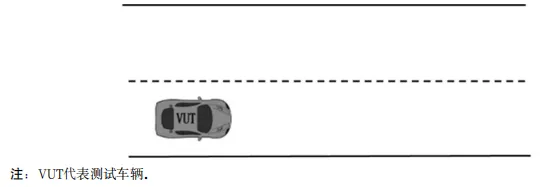
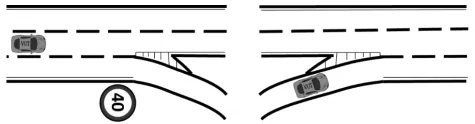
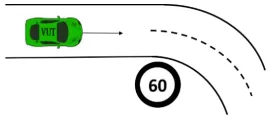
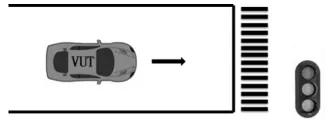
以下是标准中规定的 5 个必测试验场地示意图:
图 A.1 高速直行道路
图 A.2 高速直行带上下匝道
图 A.3 高速隧道
图 A.4 弯道
图 A.5 交通标识路段
三、关键试验方法解析:确保性能可验证、可重复
本标准不仅规定了技术要求,还详细规定了相应的试验方法和数据处理方法,确保各项指标能够被准确、可重复地验证。
标准规定了13 项核心试验,覆盖了所有性能指标:
首次定位时间
定位重收敛时间
数据更新率
位置精度
速度精度
航向精度
姿态精度
位置漂移 (GNSS 失效)
速度漂移 (GNSS 失效)
航向漂移 (GNSS 失效)
横向精度 (相对车道线)
纵向精度 (相对标识物)
航向精度 (车道线切线夹角)
3.1 试验条件
标准对试验车辆和试验设备提出了严格要求:
试验车辆要求:
试验设备要求:
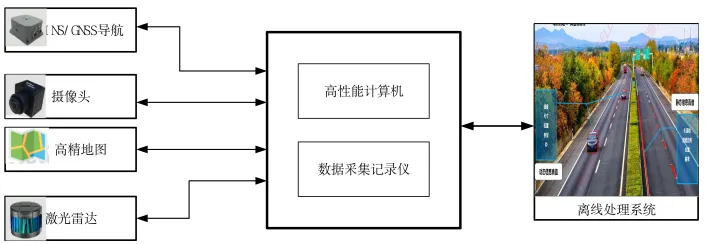
3.2 真值系统要求
真值系统是试验的 "标尺",其精度直接影响试验结果的准确性。标准对真值系统的性能提出了极高要求:
表 B.1 地理坐标系指标
GNSS 丢失时间 | 定位模式 | 定位精度 (m) RMS | | 速度精度 (m/s) RMS | | 姿态精度 (°) RMS | | |
| | 水平 | 垂直 | 水平 | 垂直 | 横滚 | 俯仰 | 方位 |
0s | RTK | 0.02 | 0.03 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 |
| 后处理 | 0.01 | 0.02 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 |
10s | RTK | 0.08 | 0.08 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 |
| 后处理 | 0.01 | 0.02 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 |
60s | RTK | 1.0 | 0.5 | 0.05 | 0.02 | 0.01 | 0.01 | 0.02 |
| 后处理 | 0.04 | 0.02 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 |
表 B.2 车体坐标系指标
指标项 | 性能指标 | 备注 |
车道准确率 | 100% | 离线处理 |
横向精度 | 10cm | 离线处理 |
纵向精度 | 20cm | 离线处理 |
航向精度 | 0.3° | 离线处理 |
数据更新率 | 100Hz | 离线处理 |
图 B.1 真值系统构成
3.3 数据输出格式
标准还规定了统一的数据输出格式,确保不同厂家的融合系统输出数据具有可比性:
表 C.1 数据输出格式
字节序号 | 字段 | 单位 | 数据类型 | 数据长度 | 描述 | 备注 |
0~3 | 同步头 | - | uint32 | 32bit | 同步字,0xFF55FF55 | |
4~7 | 数据类型 | - | uint32 | 32bit | 数据类型 | |
8~11 | 数据长度 | Byte | uint32 | 32bit | 数据长度 | |
12~15 | 厂家 | - | uint32 | 32bit | 厂家代码 | |
16~19 | 车型 | - | uint32 | 32bit | 车辆类型 | |
20~23 | 周数 | - | uint32 | 32bit | GNSS 周数 | |
24~27 | 周内秒 | us | uint32 | 32bit | GNSS 周内秒 | |
28 | 绝对定位状态 | - | uint8 | 8bit | 0: 无效 1: 有效 | |
29 | 融合定位状态 | - | uint8 | 8bit | 0: 无效 1: 有效 | |
30~37 | 纬度 | deg | double | 64bit | 地理纬度 | |
38~45 | 经度 | deg | double | 64bit | 地理经度 | |
46~53 | 高程 | m | double | 64bit | 地理高程 | |
54~57 | 地速 | m/s | float | 32bit | 地向速度 | |
58~61 | 航向 | deg | float | 32bit | 真北夹角 | |
62~65 | 俯仰 | deg | float | 32bit | 水平俯仰角 | |
66~69 | 横滚 | deg | float | 32bit | 水平横滚角 | |
70~73 | 横向距离 | cm | float | 32bit | 相对车道线横向距离 | |
74~77 | 纵向距离 | cm | float | 32bit | 相对纵向标识物 | 停止线、人行横道等静态标识物 |
78~81 | 航向 | deg | float | 32bit | (车道线切线夹角) | |
82~89 | Reserved1 | - | uint64 | 64bit | 保留字 | |
90~97 | Reserved2 | - | uint64 | 64bit | 保留字 | |
98~101 | 循环冗余校验 (CRC) | - | uint32 | 32bit | 校验字 | |
四、对行业的深远影响:推动自动驾驶量产进程
本标准的发布将对我国自动驾驶行业产生革命性的影响,主要体现在以下四个方面:
4.1 统一技术门槛,规范市场秩序
标准明确了融合定位系统的最低技术要求,将一批技术水平低、产品质量差的企业淘汰出局。
促进行业资源向头部企业集中,提升整个行业的技术水平和产品质量。
4.2 降低主机厂选型成本
统一的国家标准为主机厂提供了客观、公正的产品评价依据。
主机厂可以根据标准要求对供应商的产品进行统一测试和评估,大大降低了选型和集成的难度,减少了重复测试的成本。
4.3 促进技术创新,加速国产替代
标准规定的技术要求代表了当前国际先进水平,将引导国内企业加大研发投入,突破核心技术瓶颈。
加速车载融合定位系统的国产替代进程。目前,德赛西威、导远电子、百度阿波罗等国内企业已经能够生产符合标准要求的高性能融合定位产品。
4.4 为监管提供依据,保障自动驾驶安全
标准的实施将为政府部门对车载融合定位产品的市场监管提供技术依据。
确保进入市场的融合定位产品符合安全要求,为自动驾驶技术的大规模商业化应用奠定坚实的安全基础。
五、总结与展望
GB/T 45086.3《车载定位系统技术要求及试验方法 第 3 部分:融合系统》国家标准的发布,是我国自动驾驶行业发展的重要里程碑。
它不仅结束了车载融合定位行业长期无标可依的局面,还将推动整个行业向标准化、高质量方向发展。
互动讨论
你认为这份标准中哪项技术要求最严格,对行业影响最大?
目前你所在的公司使用的融合定位产品是否能达到这些标准要求?
你觉得标准实施后,国产融合定位企业和国际巨头相比会有哪些优势和挑战?
欢迎在评论区留言分享你的观点!也欢迎转发本文,让更多汽车技术同行了解这份重要的国家标准。
关注下面的微信公众号,回复关键字“20260504”免费获取上述标准全文

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
