Nature子刊|人形机器人能否填补自动驾驶公交的服务缺口?
- 2026-05-07 19:13:47
近年来,自动驾驶技术加速渗透公共交通领域。无人驾驶公交车、自动接驳小巴已在全球多个城市开展试点运营,省去驾驶员,理论上能够降低运营成本、提高发车频次。
然而,随着驾驶位逐渐空置,一个新的问题开始浮现。
当公交车不再配备驾驶员,那些原本由司机承担的乘客辅助、信息引导、安全保障等职能将随之消失。谁来帮助老年乘客上车?谁在紧急情况下组织疏散?谁为不熟悉路线的游客提供指引?
这些问题并非杞人忧天。一方面,老龄化社会对出行辅助的需求持续增长;另一方面,公交行业普遍面临招工难、留人难的困境。技术越先进,服务的“人情味”反而越容易被稀释。
于是,一个看似“科幻”的选项被提上桌面:人形机器人。
近期,德国慕尼黑工业大学的Klaus Bogenberger与Tanja Niels 在 Nature 旗下子刊npj Sustainable Mobility and Transport发表题为The role of humanoid robots in future public transport systems(人形机器人在未来公共交通系统中的角色)的观点论文,系统探讨了:利用人形机器人填补自动驾驶公交普及后,“无人化”留下的服务空白。
论文链接:https://doi.org/10.1038/s44333-026-00088-2

无人化越彻底,服务缺口越突出
在现有公交系统中,驾驶员除车辆操控外,还承担着大量软性服务:
帮助乘客抬购物车、回答问路、提醒坐稳扶好、在紧急情况下组织疏散。这些服务恰恰是乘客安全感和满意度的来源。
然而,一旦进入无人化自动驾驶,上述功能将全部缺位。
显著的压力来自于两端:
需求侧,发达国家老龄化加深。老年乘客在票务办理、换乘引导、登乘辅助等环节的依赖度持续提升,无障碍与包容性出行成为刚性需求。
供给侧,全球公共交通行业正面临普遍性一线人员短缺。
美国公共交通协会(APTA)调研显示,96% 的公共交通运营机构存在岗位缺口,且岗位录用拒绝率高达35%—— 这一数值是其他行业平均水平的两倍以上,直接反映出公共交通行业在就业市场中的吸引力显著不足。
多重因素叠加下,基础服务供给持续收缩,最终形成技术无人化与需求人性化的强烈错配。
研究明确指出:自动化不等于服务质量自动维持,必须主动设计替代方案。
而人形机器人,首次被系统性地纳入这一替代方案清单。
为何人形机器人是最优解决方案?
研究指出,人形机器人并非概念性尝试,而是适配公共交通场景的天然载体,核心优势在于与人类环境的高度兼容。
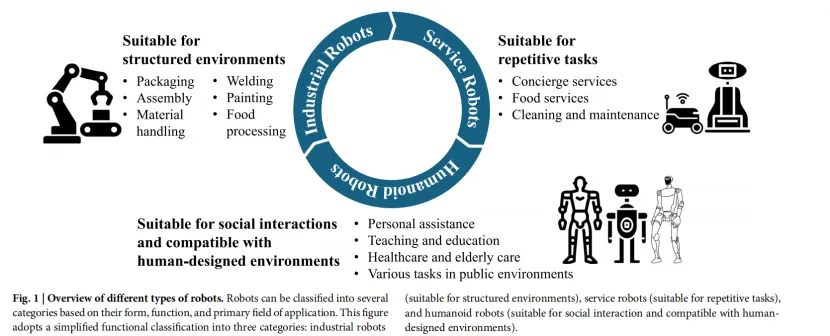
论文将机器人分为三类,功能边界清晰:
工业机器人:主要用于制造环境中的重复性、体力密集型任务,如焊接、装配。传统上被隔离在防护单元内,近年来逐步向人机协作演化。
服务机器人:设计用于有人类交互的环境,可在家庭、医疗、酒店等场景中提供支持。服务机器人可以是社交型的(如接待、陪伴),也可以是非社交型的(如扫地、割草)。
人形机器人:具有头、躯干、双臂、双腿等人体结构,能够在为人类设计的空间(含楼梯、窄门等)中移动。配备先进传感器、摄像头与人工智能,可进行面部识别、语音理解及情绪响应。
三类机器人的功能各有侧重。
工业机器人长于精度与重复性,服务机器人长于结构化任务,而人形机器人的核心优势在于对既有人类环境的兼容性与实时应对动态变化的能力。
例如,遇到临时障碍物或突发任务时,人形机器人可以灵活调整行为,这正是常规机器人系统难以企及之处。
更重要的是,现有实验已经表明:乘客对人形机器人的信任度和接受度,明显高于非人形界面。
基于多项 VR 实验与实地测试,研究证实人形机器人能够有效改善乘客体验:
用户对温和友好的类人机器人接受度显著高于功能性设备与极简界面,清晰的行为解释可进一步提升乘客对机器人指令的依从性。
此外,在自动驾驶车厢内,人形机器人的陪伴能够有效降低突发状况下的乘客焦虑感,强化对无人系统的信任。
对于老年、残障等弱势群体,人形机器人提供的物理辅助与个性化沟通,是自助设备与普通服务机器人无法替代的。

任务分类:什么工作适合人形机器人?
论文核心贡献之一,是构建了公共交通系统中机器人任务的三大分类矩阵,并明确了人形机器人与服务机器人的分工边界。
第一,信息交互与引导。
基础信息查询如时刻表、线路图等可由服务机器人或自助终端完成,而个性化引导、换乘陪同、跨语言沟通等需要语言与手势协同的任务,更适合由人形机器人承担,其类人形态能显著提升乘客信任度与接受度。
第二,乘客辅助。
上下车搀扶、轮椅辅助、座位引导、失物招领等涉及安全与情感交互的工作,必须依靠人形机器人的精细操作与社交能力完成;仅行李搬运等标准化任务可交由服务机器人执行。
第三,站台与场站管理。
清洁、设备巡检等重复性工作由服务机器人负责,而高峰客流疏导、应急秩序维护等动态高敏感任务,需要人形机器人以自然交互方式完成。客流统计、人员计数等后台监测任务,则由搭载传感器的服务机器人实现数据精准采集,无需占用人形机器人资源。
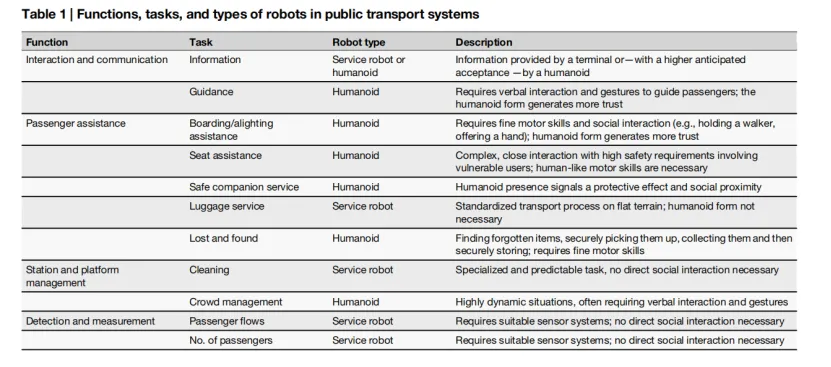
整体而言,高社交、高安全、高动态任务由人形机器人承担,而结构化、重复性、数据型任务由服务机器人执行,这一分工体系是未来机器人化公共交通的核心运行逻辑。

人形机器人与自动驾驶系统的协同框架
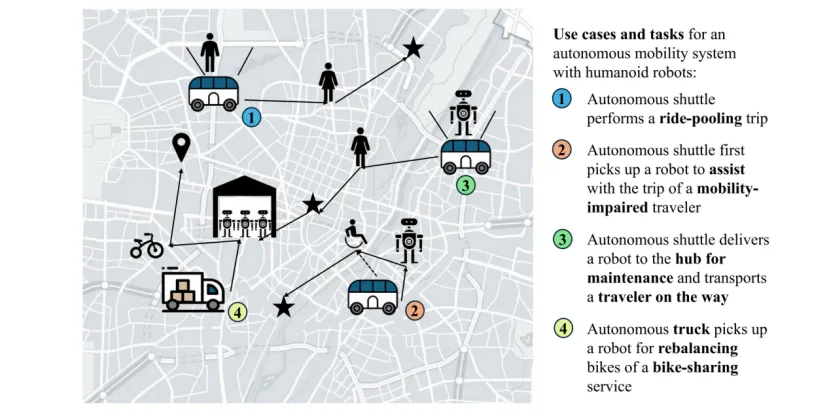
论文最具前瞻性的一点,是提出了一个系统级的运行概念:
人形机器人不是固定在某个车站,而是可以随车移动、跨区域调度,甚至在不同任务之间切换。
一个集中化操作系统可动态调度机器人执行多重角色。
如:早高峰时,人形机器人主要在大型换乘站引导客流;平峰期,部分人形机器人登上自动驾驶接驳车,辅助老年乘客前往医院;夜间,人形机器人可被调往物流枢纽,帮助分拣包裹或搬运共享单车。
中央调度系统根据实时需求,将人形机器人派往不同任务点——有的随车服务,有的站台管理,有的后勤维护。机器人与自动驾驶车辆共享同一个调度平台。
通过云端协同、群体学习与全域调度,人形机器人能力可快速复制:单台人形机器人可胜任多类型任务,其学会的任务能即时共享至整个车队,从而降低部署成本。
这一模式表明,投资一支人形机器人车队可以在多个城市服务场景中复用,显著提高资产利用率与经济可行性。

落地挑战:跨学科协同才能实现真正部署
论文后半部分系统列出了当前面临的主要挑战,这些挑战并不局限于技术层面。
技术层面,机器人需具备全天候环境适应能力,在极端温度、降水、振动条件下保持稳定运行,并具备多任务泛化能力。基于“世界模型”的训练有助于虚拟预演,但大规模学习网络中的数据质量、验证与治理仍是难题。
法律层面,需明确责任界定、安全认证与运营合规框架。人机交互场景下的事故责任归属尚无答案;实时感知、用户识别与云优化过程中,数据隐私与网络安全必须得到刚性保障。社会层面,需持续提升公众接受度,避免机器人设计强化性别与社会偏见。
社会层面,需持续提升公众接受度,避免机器人设计强化性别与社会偏见。不同用户群体——老年人、残障人士、儿童以及不熟悉数字服务的人群,对人形机器人的接受度存在显著差异。信任具有脆弱性:虽可通过可靠、透明的行为逐步建立,却也可能因一次意外迅速瓦解,尤其是对于依赖辅助且缺乏应对能力的弱势用户而言。
运营层面,要确定合理的经营主体、车队规模与运维体系,平衡成本与服务质量。例如,机器人服务应由公共部门运营、纳入现有交通管理机构,还是由私营出行供应商主导,混合模式下的问责与公平性问题同样需要明确。
论文强调,仅靠技术可行性不足以保证可持续部署,未来的研究必须采取跨学科路径,融合工程、城市规划、法律、人机交互与社会科学,确保人形机器人真正以包容、安全、有韧性的方式增强公共交通系统。

学术贡献与行业启示
整体而言,研究认为,在技术快速演进的同时,法律、伦理、社会接受度等领域的研究不应被动跟随,而应主动介入。
为此,研究首次提出人形机器人与自动驾驶公共交通的深度融合方案,建立了清晰的机器人任务分工框架,为工程落地提供学术依据,并从技术、法律、社会、管理四个维度构建跨学科研究议程,为后续研发与政策制定指明方向。
这一工作直接回应了无人化带来的服务缺失这一行业痛点,也传递出:公共交通的自动化不等于“去人化”,而是以新的形式重构人本服务。
人形机器人的价值,在于让自动驾驶系统在保持高效、灵活等技术优势的同时,重新回归安全、包容、有温度的出行本质,从而为未来可持续、普惠型的公共交通体系开辟一条可行的路径。
END
推荐阅读1、若提前知晓“已存在”的道路故障,这场“辅助驾驶”悲剧或可避免
2、专访朱西产|拷问示范区:花了钱、出了标准,却不敢说出事故
3、顶刊 | 车路云一体化破解信号灯难题:让自动驾驶学会“未卜先知”



