王小磊:自动驾驶技术的起源、演进与未来
- 2026-05-09 12:27:54

王小磊:高级工程师,中国土木工程学会城市公共交通分会智库专家,曾经任重庆市公共交通控股(集团)有限公司电车公司总工程师、BRT公司书记兼副总经理、公交维修公司总经理、恒通客车顾问、吉尔吉斯斯坦共和国史德洲(Шыдыр Жол Кей Джи)有限责任公司总机械师等。
王小磊先生是实现中国公交第一笔碳交易的参与者。
自动驾驶技术的起源、演进与未来
王小磊
引言
自内燃机汽车诞生以来,人类对“无需人力干预的自动行驶”的憧憬便从未止息。驾驶行为的本质,是一个集环境感知、决策判断与执行控制于一体的复杂闭环系统。历经近一个世纪的探索,自动驾驶技术已从科幻构想走向现实落地——从早期的无线电遥控实验,到如今无方向盘量产车型的测试运行。凭借人工智能算法在感知精度、决策效率及数据迭代上的压倒性优势,自动驾驶正在突破人类生理极限,被视为解决交通事故、提升路网效率、重构未来出行生态的核心路径。回顾其发展历程,不仅有助于厘清技术演进的内在逻辑,更能精准把握未来的产业风向。
1. 起源与早期探索:从机械幻想到概念验证
1.1 萌芽:“文艺复兴人”的智慧
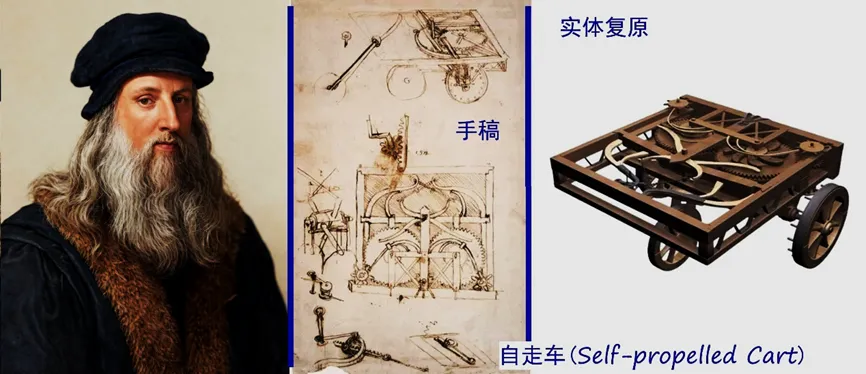
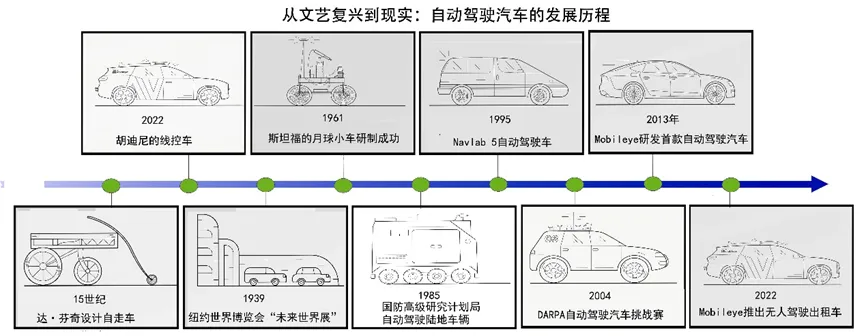
据《大西洋古抄本(Codice Atlantico)》记载,自动驾驶的思想火花最早可追溯至15世纪末。被誉为“文艺复兴全才(Genio universale del Rinascimento)”的列奥纳多·达·芬奇(Leonardo da Vinci),于1478年绘制了一份自走车(Self-propelled Cart)的手稿。长期以来,这被视为纯粹的概念草图。直到2004年,佛罗伦萨科学史研究所的保罗·加卢齐(Paolo Galluzzi)团队依据手稿成功复原了实体模型。该模型通过预设的弹簧机构驱动,利用可编程凸轮实现自动转向,能够沿预定路径行驶。尽管它并非现代意义上的汽车,但从工程控制角度看,这是人类历史上首个具备“路径规划 + 执行控制”理念的原始表达,证明了这位“文艺复兴人”在自动控制理念上领先了数个世纪。
1.2 探索:从遥控到基础设施引导
进入20世纪,自动驾驶的探索从机械结构转向电子控制:

- 无线电遥控雏形(1925年):美国发明家弗朗西斯·霍迪纳(Francis Houdina)展示了“American Wonder”。这辆通过无线电波控制方向、刹车和离合器的汽车,虽仍需人工远程操控,但首次实现了车辆与驾驶员的物理分离,开启了“无人直接操控”的想象空间。
- 概念愿景(1939年):在纽约世博会上,通用汽车(GM)展示了“Futurama”愿景,描绘了一个由无线电引导的未来高速公路系统。这一展示让公众首次直观感受到自动驾驶的潜力,极大地激发了社会遐想。
- 基础设施依赖期(1958年):通用汽车与RCA公司合作,在新泽西州公路上演示了基于路面埋设电缆的引导系统。虽然该系统因高昂的基础设施改造成本而难以普及,但它确证了“自动化驾驶”在工程上的可行性。
2. 实验与突破:从学术实验室到商业前夜
2.1 学术奠基:感知与智能的觉醒
20世纪60年代至90年代,学术界成为技术研发的主引擎:

- 感知起步(1960s-1970s):1961年,斯坦福大学的“StanfordCart”在实验室环境下实现了自主避障,奠定了环境感知的基础。70年代,随着微处理器的问世,日本筑波工学研究所(つくばこうがくけんきゅうしょ)开发了首台基于摄像头标记检测的车辆,时速达30公里。
- 视觉驾驶的确立(1980s):德国慕尼黑联邦国防军大学的恩斯特·迪克曼斯(Ernst Dickmanns)团队开发了VaMoRs和VITA-2车辆。它们利用动态视觉系统在高速公路上实现了自动跟踪与超车(时速130公里),证明了计算机视觉在高速动态场景中的可行性。
- 神经网络的引入(1990s):1989年,卡内基梅隆大学(Carnegie Mellon University,CMU)首次将神经网络应用于车辆控制。1995年,其NavLab项目完成了横跨美国的2797英里“不换手”测试,验证了自动驾驶在真实复杂路况下的潜力,为商业化积累了宝贵数据。
2.2 技术爆发:竞赛催化与巨头入局
21世纪初,自动驾驶进入加速发展期,标志性事件频发:
- DARPA挑战赛(DARPA Grand Challenge 2004-2007):美国国防部高级研究计划局(DARPA)举办的系列挑战赛成为全球技术的催化剂。
- 2005年:斯坦福大学的“Stanley”与CMU的“H1ghlander”在沙漠中完赛,展示了激光雷达、视觉与规划算法的协同突破。
- 2007年:城市挑战赛(Urban Challenge)要求车辆在模拟城市环境中遵守交规并交互。此次赛事直接催生了谷歌自动驾驶项目的诞生。
- 科技巨头的入场(2009-2016):
- 谷歌(Waymo):2009年,由Sebastian Thrun领导的秘密项目启动。该项目大规模融合激光雷达(LiDAR)、高精地图与深度学习,首次将自动驾驶从实验室推向真实世界的复杂长尾场景。
- 特斯拉(Tesla):2014年推出Autopilot硬件,开创性地采用“纯视觉”路线,依托量产车队构建海量数据闭环。
- 标准确立与商业化启航(2016):国际汽车工程师学会(SAE)发布J3016标准,确立了L0-L5分级体系,为全球提供了统一的评价标尺。同年,通用汽车收购Cruise,标志着行业从“纯技术探索”迈向“科技公司+传统车企协同”的商业化新阶段。
3. 核心技术架构的演进趋势
当前,自动驾驶技术正经历从“规则驱动”向“数据驱动”的范式转移,具体体现在以下四个维度:
3.1 感知系统:从单一模态到多传感器深度融合
早期系统依赖单一传感器,存在明显的物理局限。现代架构普遍采用多传感器融合(Sensor Fusion)策略:
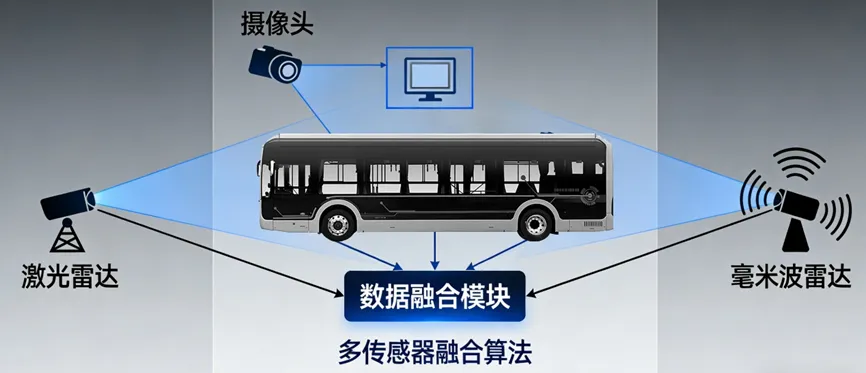
- 激光雷达(LiDAR):提供高精度3D点云,解决测距难题,成本已从数万美元下探至数百美元级别。
- 摄像头:模仿人眼,依托深度学习识别语义信息(车道线、标牌、物体类别)。
- 毫米波雷达:具备全天候特性,精准测量相对速度,穿透雨雾能力强。
- 趋势:尽管Tesla坚持“纯视觉”方案,但以Waymo、华为为代表的“激光雷达+视觉”融合方案因具备更高的安全冗余,已成为L4级及以上的主流选择。
3.2 决策规划:从规则堆叠→端到端大模型
这是近年来最深刻的变革:
- 规则驱动(Rule-based):早期依赖工程师编写海量的“如果 - 那么”代码,难以覆盖无穷尽的长尾场景(Corner Cases)。
- 数据驱动(Data-driven):引入机器学习与强化学习,使车辆具备预测博弈能力。
- 端到端(End-to-End):2023-2024年,随着Transformer架构与BEV(鸟瞰图)技术的成熟,行业迈入“端到端大模型”时代。系统直接输入传感器原始数据,经神经网络黑盒子处理后输出控制指令。这种架构大幅提升了车辆在无保护左转、复杂路口博弈等场景下的拟人化表现,实现了从“教机器规则”到“让机器习得直觉”的跨越。
3.3 地图与定位:从“重地图”到“轻地图/无图”
厘米级高精地图曾是L4自动驾驶的“拐杖”,但其更新成本高、覆盖慢的弊端日益凸显。行业正加速转向“重感知、轻地图”甚至“无图”方案。通过实时感知构建局部拓扑结构(Local Map),系统不再依赖预先采集的静态地图,极大地提升了自动驾驶城市的开通速度与泛化能力。
3.4 演进背后的深层逻辑
- 知识获取范式的转变:从“知识注入”(人工编码规则)转向“知识习得”(模型从数据中自我进化)。如同从“背诵交规”转变为“观摩老司机驾驶”。
- 信息流的无损传递:传统模块化架构中,感知结果被压缩为结构化标签,丢失了大量细节。端到端架构保留了原始数据的全量信息,使模型能利用细微线索(如前车轮胎偏角、行人姿态)进行更精准的决策。
- 算力与数据的飞轮效应:随着专用芯片(如NVIDIA Thor、Tesla Dojo)算力的指数级增长,叠加海量真实驾驶数据,端到端模型的性能呈现非线性提升,而传统规则系统的边际效益已触及天花板。

4. 结论
自动驾驶技术的百年演进,是人类对解放双手、重塑出行梦想的执着追求。从达·芬奇的弹簧车到如今的端到端大模型,技术已跨越了从“不可能”到“可能”,再到“好用”的关键门槛。
当前,自动驾驶正处于大规模商业化应用的前夜。未来,随着大算力芯片的普及、端到端算法的成熟以及数据闭环的高效运转,系统将具备更强的极端场景处理能力。与此同时,法律法规的完善、伦理框架的建立以及基础设施的智能化升级,将为技术的全面铺开扫清障碍。自动驾驶将不再仅仅是交通工具的升级,而是成为重塑城市形态、释放社会生产力、提升人类生活品质的新型基础设施。尽管前路仍有挑战,但智能化的车轮已不可逆转地驶向未来。


