HDMAP、SDMAP与轻图/无图自动驾驶:一场从“记住世界”到“理解世界”的迁移
- 2026-05-27 04:46:55
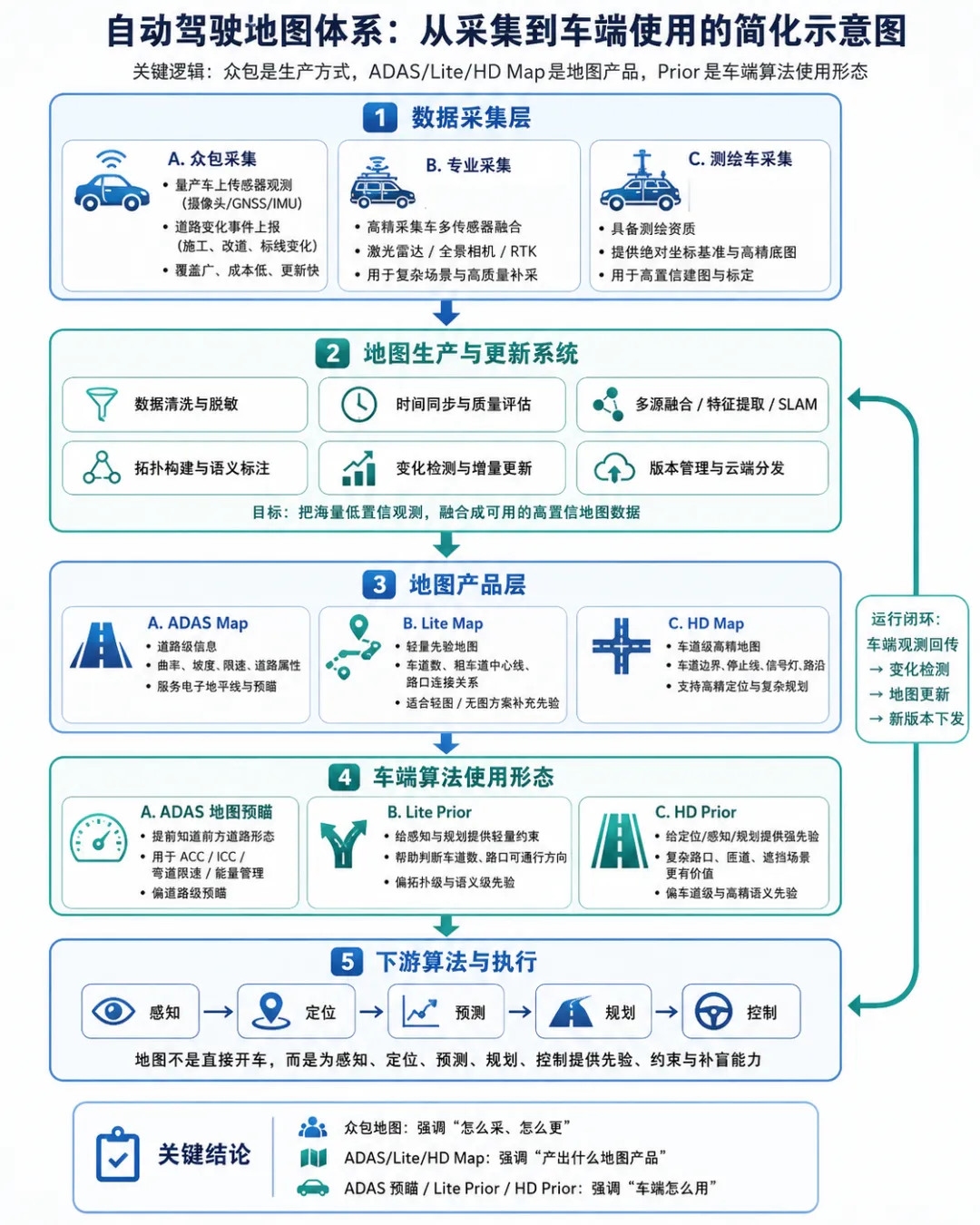
“有图”到“无图”不是“完全不看地图”,工程上真正发生的变化是:系统正在对HDMAP的强依赖转向多源信息互补,具体转变可描述为:
从
依赖预先采集、制作并审核发布的高精地图,将车道线、车道中心线、车道连接关系、停止线、路沿、交通灯位置、交通标志、道路曲率、坡度和限速等静态道路要素,提前作为车辆感知、定位和规划的基础参考
迁移到
用 SD 导航地图提供全局路线与道路级拓扑,再由车端在线感知和局部建图模块实时补齐车道线、路沿、停止线、信号灯、障碍物和可通行空间等细粒度信息,形成车辆周边几十到上百米范围内的局部道路语义图
换句话说,地图没有消失,只是从“绝对主导者”变成了“参谋之一”。
HDMAP 像一份精密到厘米级的城市剖面图,提前把车道线、停止线、红绿灯、路缘、交通牌、道路曲率、坡度、限速、车道连接关系都写进系统。SDMAP 更像普通导航地图,告诉车辆“从哪条路到哪条路、哪里转弯、道路大致怎么连”。
轻图/无图方案则像一个熟练司机:导航给目的地,大脑实时看路,过去的经验提供倾向。
从产品角度需要先把边界说清:
当前绝大量产乘用车城市 NOA/城区 NCA/XNGP 等仍属于驾驶辅助范畴,驾驶员需要持续监督;
L2 仍由驾驶员负责监控;
L3 在限定 ODD 内由 ADS 执行完整动态驾驶任务,但需要人类 承担fallback;
L4 则在 ODD 内由 ADS 执行动态驾驶任务并承担 fallback,必要时进入最小风险状态。
责任边界决定了 HDMAP、SDMAP 与无图方案的工程取舍完全不同。L2 追求覆盖、成本和体验;L4 追求可验证安全和运营边界。
一、地图是自动驾驶系统的“长期记忆”
自动驾驶系统里,“地图”不是手机导航里的那张图。它更接近一个外部记忆器:告诉车辆哪些东西大概率是静态的、哪些规则长期有效、哪些道路结构肉眼看到之前就应该被预期。
TomTom(通腾)对 ADAS Map 和 HD Map 的区分很典型:ADAS Map 提供坡度、曲率、交通标志、限速、路口曲率、路口车道等信息,精度通常是数米级;而 HD Map 面向更高阶自动化,强调厘米级精度、车道模型、交通标志、道路设施与车道几何,用于辅助定位、感知与路径规划。
表1:HDMAP、SDMAP、轻图、在线地图的工程分工
行业真正的迁移方向是:
离线确定性地图 → 在线概率地图 → 模型内隐式地图
自动驾驶也一样,地图并没有消失,而是从一个独立的静态底图,逐渐拆解为路线意图、道路拓扑、交通规则、定位参考和局部道路先验等多类信息,分别进入感知、定位、决策和规划链路。
二、HDMAP 价值
HDMAP 最有价值的地方不在于“告诉车怎么开”,而在于给车辆一个稳定的静态世界锚点。Waymo 对自家地图的描述很清楚:车辆通过多传感器感知道路,同时使用高度详细的自定义地图提供位置上下文;地图记录道路类型、道路尺寸、车道合流、停止标志、人行横道等静态信息,并帮助车辆在 GPS 困难的隧道或高楼峡谷中定位。Waymo 也强调,如果道路封闭或施工区与地图不一致,车端感知会实时识别并调整,且变化会反馈给运营中心与车队。
其中的工程真相是:成熟 L4 系统不是“盲信 HDMAP”,而是把 HDMAP 当作一个强先验传感器。
如果把车端摄像头、激光雷达、毫米波雷达比作“眼睛和耳朵”,HDMAP 就是“记忆”。人开熟悉道路时,注意力也不是平均分配的。你知道前面有匝道、学校、急弯、公交站,就会提前减速和选道。HDMAP 做的是同一件事,只是精度更高、结构化程度更强。
但 HDMAP 也有硬伤。
它最怕三件事:变化、规模、合规。
城市道路不是 CAD 图纸,而是一个会自我变形的生物体。施工围挡、临时改道、车道重划、锥桶、潮汐车道、事故封路、违停占道,都会让“昨天正确的地图”在今天变成误导。Mobileye 在介绍 REM 时批评传统 HD Maps 依赖昂贵采集车、半自动/人工流程、更新不够实时,并提出用众包车辆以小数据包方式构建和更新道路语义,并强调近实时变化检测。

传统 HDMAP 是“派专业测绘车去拍高清纪录片”众包语义地图是“让成千上万辆普通车每天顺手交路况笔记”
众包:量产车在正常行驶过程中,车端感知系统识别出道路中的关键语义元素,例如车道线、路沿、停止线、人行横道、交通标志、限速牌、道路分叉、匝道入口、交通灯位置等,然后把这些元素压缩成很小的结构化数据包上传到云端。云端把大量车辆上传的数据进行匹配、融合、去噪和一致性校验,生成或更新轻量化道路语义地图(粒度介于HD和SD之间)。
近实时变化检测:系统通过大量车辆持续上传的道路语义数据,快速发现某个道路位置与已有地图不一致,例如新增施工围挡、车道线重画、限速改变、匝道封闭、路口改造、停止线变化等,然后在云端判断这是偶发异常还是稳定道路变化,并触发地图更新或风险提示。
HDMAP 的第二个问题是规模。Robotaxi 可以在有限 ODD 内反复打磨地图,乘用车 NOA 却要覆盖全国甚至全球道路。前者像开一家米其林餐厅,菜单少但每道菜极致可控;后者像做多家连锁快餐,核心矛盾不是单点极致,而是成本、覆盖和一致性。
第三个问题是合规。在中国,智能网联汽车采集车辆周边道路设施空间坐标、实景影像、点云及道路拓扑等地理信息数据,会被纳入测绘地理信息管理(自动驾驶核心法规体系总结);基础地图、高级辅助驾驶地图、高精度地图、自动驾驶地图等也被归入导航电子地图范畴。这意味着高精地图不是普通软件资产,而是强监管地理信息资产。
所以,HDMAP 不是技术落后,而是商业扩张时代价变重了。
三、SDMAP 的角色:“路线意图总线”
SDMAP 在轻图/无图架构里不是为了替代 HDMAP 的厘米级车道几何,而是承担三个更基础的任务:
导航目标:我要去哪里,当前路线经过哪些道路、路口、匝道、主辅路。
拓扑骨架:道路间如何连接,哪里可以左转、右转、掉头,哪条路接哪条路。
语义提示:道路等级、限速、隧道、桥梁、收费站、环岛、高速/城市道路属性。
轻图/无图系统真正做的是:让 SDMAP 给出“宏观主动脉”,让车端感知生成“微观毛细血管”。
DeepRoute 与腾讯地图的合作很有代表性。公开材料称,DeepRoute Driver 3.0 Mapfree 方案可仅依赖 SD Map 实现地址到地址导航,并感知车道线、交通信号等信息;这不是不使用地图,而是用标准导航地图承载全局路线,用车端系统补足高精车道级信息。
图1:轻图/无图系统中的地图分工

图里最关键的是“可选”两个字,HDMAP 不再是系统启动的必要条件,而是提升确定性、舒适性和安全冗余的增强项。
四、“无图”本质是把 HDMAP 的工作拆给了感知、预测、规控和云端闭环
量产车企说“无图城市智驾”,工程上通常意味着四件事:
1. 车辆不再强依赖预先采集、审图、发布的厘米级 HDMAP。
2. SD 导航地图仍用于路线规划和道路级拓扑约束。
3. 车端模型需要在线识别车道、路沿、停止线、交通灯、障碍物、施工锥桶、临时标线,并推理局部拓扑。
4. 云端通过车队数据持续训练模型、发现坏例、更新策略。
小鹏 2023 年 11 月官方公告显示,XNGP 在 21 座无高精地图覆盖城市开放城市导航辅助驾驶能力;2024 年 5 月,媒体转引小鹏官方信息称 XNGP 城区智驾完成“100% 无图化”。
华为 ADS 2.0 的公开发布信息强调降低对高精地图的依赖,并通过 BEV、GOD/RCR 等感知与拓扑推理能力扩展城区 NCA 覆盖;但“无图”仍应理解为“不以传统高精地图为强前置条件”,而不是脱离导航地图、传感器可视范围和功能 ODD。
理想汽车 2024 年发布 OTA 6.0 时也强调无图 NOA“全国都能开”,覆盖 AD Max 车型,并称城市、城镇、二级道路都能行驶。全国都能开”属于产品传播口径,应理解为功能不再按传统高精地图城市名单强限制,而不是承诺所有道路、所有天气、所有交通组织形态都具备同等可用性。
这类方案的战略优势很明显:开城速度快,成本低,用户覆盖大,数据闭环强。但别被话术麻醉,它牺牲的是另一部分东西:把可验证性压力从地图生产与版本管理转移到了模型泛化、长尾数据、仿真回放和运行时安全监控。
五、主流落地项目的真实组合方案
表2:典型项目路线对比
Tesla 这条路线尤其容易被误读,其核心不是“不用地图”,而是尽量不使用传统 HDMAP 作为车辆运行的强依赖,更多依赖视觉输入、神经网络与大规模驾驶数据。Reuters 对 Tesla robotaxi 技术路线的分析指出,Tesla 相比 Waymo 等竞争对手更依赖视觉和端到端机器学习,少用雷达/激光雷达等额外安全层,因此成本与规模潜力高,但黑盒风险、错误诊断与监管挑战也更突出。
Waymo 则走另一条路。2026 年 Waymo 宣布第六代 Waymo Driver 开始全自动运营,系统包括高分辨率摄像头、成像雷达和激光雷达,强调在雨雪、低光、道路喷溅等长尾场景中的多模态冗余。总体仍延续其高度详细地图与车队运营闭环。
这不是谁绝对先进谁绝对落后,而是商业目标不同。
Waymo 是“我宁可慢,也要把无人责任边界守住”。 量产 NOA 是“我必须快,否则用户覆盖、数据闭环、商业竞争都输”。Tesla 是“我押注模型和数据规模能消化规则与地图复杂度”。 Mobileye 是“我用众包轻语义地图,把地图做成可规模化基础设施”。
六、HDMAP 与 SDMAP 的结合-分层仲裁
成熟系统不会粗暴地问“用不用高精地图”,而是问:
在当前 ODD、当前道路、当前感知置信度、当前驾驶任务下,地图应该占多大权重?
图2:HDMAP + SDMAP + 在线感知的融合架构
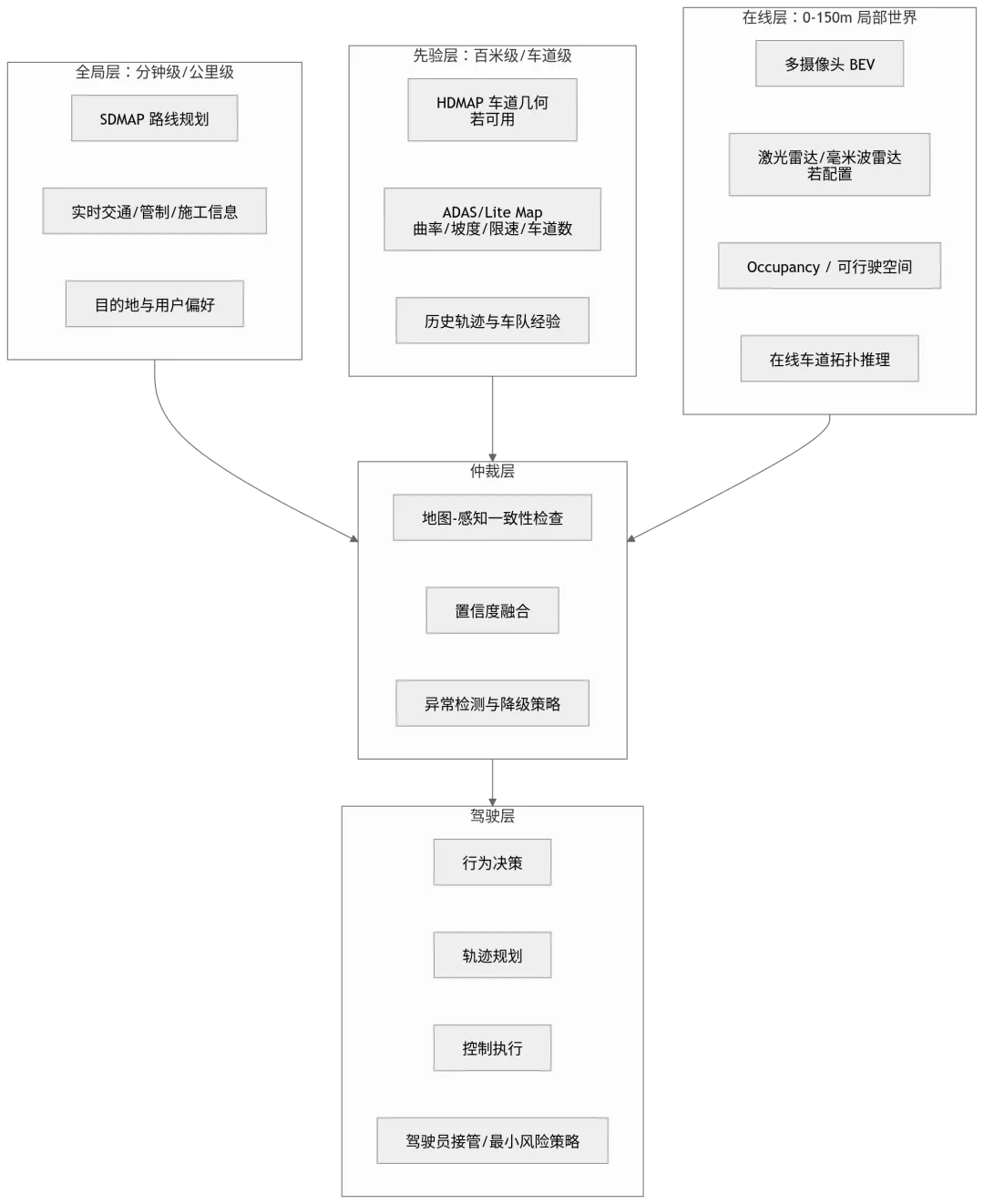
这里的关键模块不是感知,也不是地图,而是仲裁层。
地图和感知冲突时,系统不能机械地“相信新鲜感知”或“相信高精地图”。正确做法是按场景分级:
这就是“轻图”的真正含义:不是地图变小这么简单,而是地图从绝对真值变成概率先验。
七、在线建图是无图方案的发动机
无图方案能跑起来,核心依赖 BEV 感知、Occupancy Network、在线矢量化地图构建、局部拓扑推理和数据闭环。学术界近几年也在系统性推动这件事。
VectorMapNet 直接预测地图中的车道线、道路边界、停止线等关键线状元素,并用少量有序点连接成折线生成对下游任务更友好的矢量化 HD 语义地图;MapTR/MapTRv2 把在线建图问题改写成一个 DETR 式的矢量元素预测问题:给车载摄像头/传感器输入,网络直接输出一组地图元素,每个元素由类别和一串点坐标组成,例如车道线、道路边界、人行横道、中心线等。论文明确说,它采用 encoder-decoder Transformer,把在线矢量化 HD Map 构建变成并行回归问题,而不是像 VectorMapNet 那样逐点自回归生成。
这些研究对应到量产工程,就是让车辆在没有离线 HDMAP 的情况下,临时“画出”眼前道路的局部 HDMAP。
图3:无图 NOA 的在线局部地图生成流程

但在线建图有四个天然痛点。
遮挡:前方大车挡住地面标线,系统很难知道被遮住的车道如何延续。HDMAP 可以提前知道,在线感知只能猜。
远距预瞄:高速匝道、复杂立交、连续变道需要提前几百米规划。SDMAP 能给大方向,但 lane-level 细节不够;在线感知距离有限。
拓扑歧义:中国城市道路大量存在主辅路、非标准路口、潮汐车道、借道左转、机非混行。感知看到的是几何,驾驶需要的是规则。
验证困难:HDMAP 系统的问题可以部分归因到地图版本、定位误差、感知冲突;端到端/在线建图系统的问题往往埋在模型参数和时序上下文里,复现、解释、认证都更难。
所以,“无图”不是省掉地图成本那么简单,它是把成本转移到了模型、数据、算力、测试和安全论证上。可能导致成本更隐蔽,也更难管理。
八、轻图/无图落地重在系统闭环
轻图/无图方案高价值创新集中在五个地方。
1. 从“地图匹配定位”转向“语义局部定位”
传统 HDMAP 系统常用点云、车道线、路牌、杆状物等静态特征做高精定位。轻图方案会更重视语义一致性:我不一定要知道自己在全球坐标里精确到 5cm,但我要知道自己在当前道路结构中的相对位置——我在哪条车道、左侧几条车道、前方是否停止线、目标路线需要哪次变道。
这是一种从“绝对坐标”向“任务坐标”的迁移。对驾驶来说,很多时候“我在这条车道中心偏左 20cm”比“我的 WGS84 坐标是多少”更有用。
2. 从“HDMAP 车道图”转向“在线拓扑图”
轻图/无图系统的关键不只是识别车道线,而是理解车道连接关系。
路口里最难的不是看见线,而是知道哪条线通向哪条路、哪个交通灯控哪条流向、哪片区域可以等待、哪里不能压、哪里可以临时借道。视觉能看见像素,但驾驶需要拓扑。
所以现在的系统越来越像在实时生成一个局部 Lane Graph:
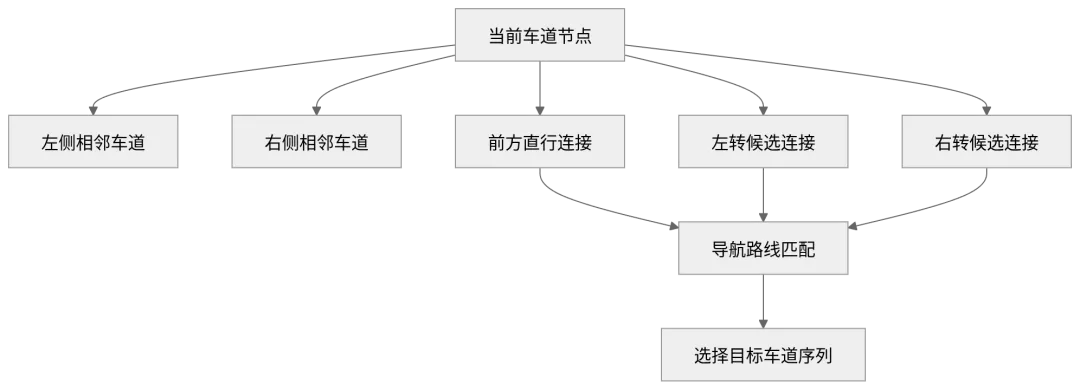
3. 从“地图给答案”转向“地图给候选,感知做判定”
这点是工程分水岭。
旧架构常常是地图给出确定车道边界和连接关系,感知负责检测临时动静态障碍物。新架构更像多假设推理:SDMAP 给出道路级路径,在线感知生成多个局部车道拓扑候选,模型结合导航意图、交通灯、车辆行为、历史轨迹,选择最可信路径。
这像医生诊断,地图不是诊断书,而是病历;传感器也不是全部真相,而是此次检查结果。
4. 从“开城工程”转向“泛化工程”
高精地图时代,一个城市开通 NOA 往往像修铁路:采集、生产、审核、发布、测试、灰度。无图时代更像训练司机:系统需要在大量城市里形成对道路结构和交通行为的泛化能力。这也是小鹏、华为、理想等路线的核心竞争点。它们宣传“全国都能开”,实际背后拼的是模型泛化、坏例挖掘、OTA 迭代和用户数据闭环,而不是地图资产本身。
5. 从“显式规则栈”转向“神经策略 + 安全壳”
端到端路线带来的不是简单替换模块,而是驾驶策略生成方式变化。Tesla FSD 的争议也在这里:端到端学习可能降低人工规则维护成本,提高人类驾驶风格拟合能力;但 Reuters 报道也指出,端到端 AI 的黑盒特性会让错误诊断和安全防护更难。
工程上更稳妥的形态不是“纯端到端裸奔”,而是:
神经网络负责提出高质量驾驶意图(全局轨迹规划、行为决策),传统安全模块负责约束不可越界行为(局部轨迹规划)。
九、不同落地路线的架构取舍
方案A:HDMAP 主导型
适用于L4 Robotaxi、高安全冗余系统、限定园区/港口/矿区/机场等 ODD。
优势是确定性强、可验证性好、定位稳定、对遮挡和复杂路口更友好。缺点是扩展慢、地图运营重、合规门槛高。
Waymo 是代表。它不是因为技术弱才用 HDMAP,而是因为 L4 无人运营的安全目标更残酷。没有安全员的车,不能用“模型大概能泛化”当主要安全论据。Waymo 第六代 Driver 仍强调多模态传感器冗余,在摄像头之外保留激光雷达和成像雷达,用于恶劣天气和长尾事件。
方案B:SDMAP + 在线建图主导型
适用于量产城市 NOA、城区 NCA等 L2+/L2++ 辅助驾驶。
优势是覆盖快、成本低、商业规模大、数据闭环强。缺点是需要极强感知和拓扑推理能力,系统稳定性更依赖模型泛化;在标线混乱、遮挡严重、规则非标、施工密集区域,表现会更波动。
方案C:众包轻语义地图型
适用于全球化 ADAS、L2+、未来低成本 L3。
Mobileye REM 的思路是把地图做成车队自动采集的轻量语义层,不追求传统 HDMAP 那种大而全的全局厘米级几何,而是记录自动驾驶真正需要的道路语义和局部精确关系。它公开强调众包、低带宽、自动化和近实时更新。
这条路线的关键资产不是单车模型,而是装车规模。车辆越多,变化检测越快,语义地图越鲜活。
方案D:端到端隐式地图型
适用于拥有超大车队数据、强训练基础设施、可承受长期技术波动的玩家。
它的诱惑很大:少维护地图,少写规则,让模型从驾驶数据中直接学习世界结构和行为策略。问题也尖锐:模型学到的“地图”藏在参数里,不能像 HDMAP 一样直接查看、编辑、审图和版本回滚。
这像把一本纸质地图烧掉,然后让一个人凭记忆带路。高手可以走得很快,但当他走错时,很难知道是记忆错了、判断错了,还是他根本没理解那个路口。
十、HDMAP 与 SDMAP 的最佳结合方案:分场景、分置信度、分责任边界
真正可落地的主流架构,不会纯粹站队 HDMAP 或无图,大概率采用分层架构,以“三层地图 + 双闭环”模式为例。
三层地图
SDMAP:全局路线层负责目的地、道路级路径、道路属性、限速、收费、主辅路、道路等级和宏观导航意图。
Lite/HD Prior:先验增强层在高价值区域保留车道级拓扑、匝道、复杂路口、灯组关系、停止线、特殊规则、易错点。它可以来自传统 HDMAP,也可以来自众包语义地图、历史轨迹聚合、云端自动化建图。
Online Local Map:实时驾驶层车端基于 BEV、Occupancy、检测、跟踪和局部拓扑推理,实时生成前方几十米到百米级的可驾驶区域,服务于近中距离规划。在高速、匝道和复杂立交等需要远距预瞄的场景中,仍需要 SDMAP、ADAS Map、轻图或历史先验提供更长视距的路线与拓扑约束。
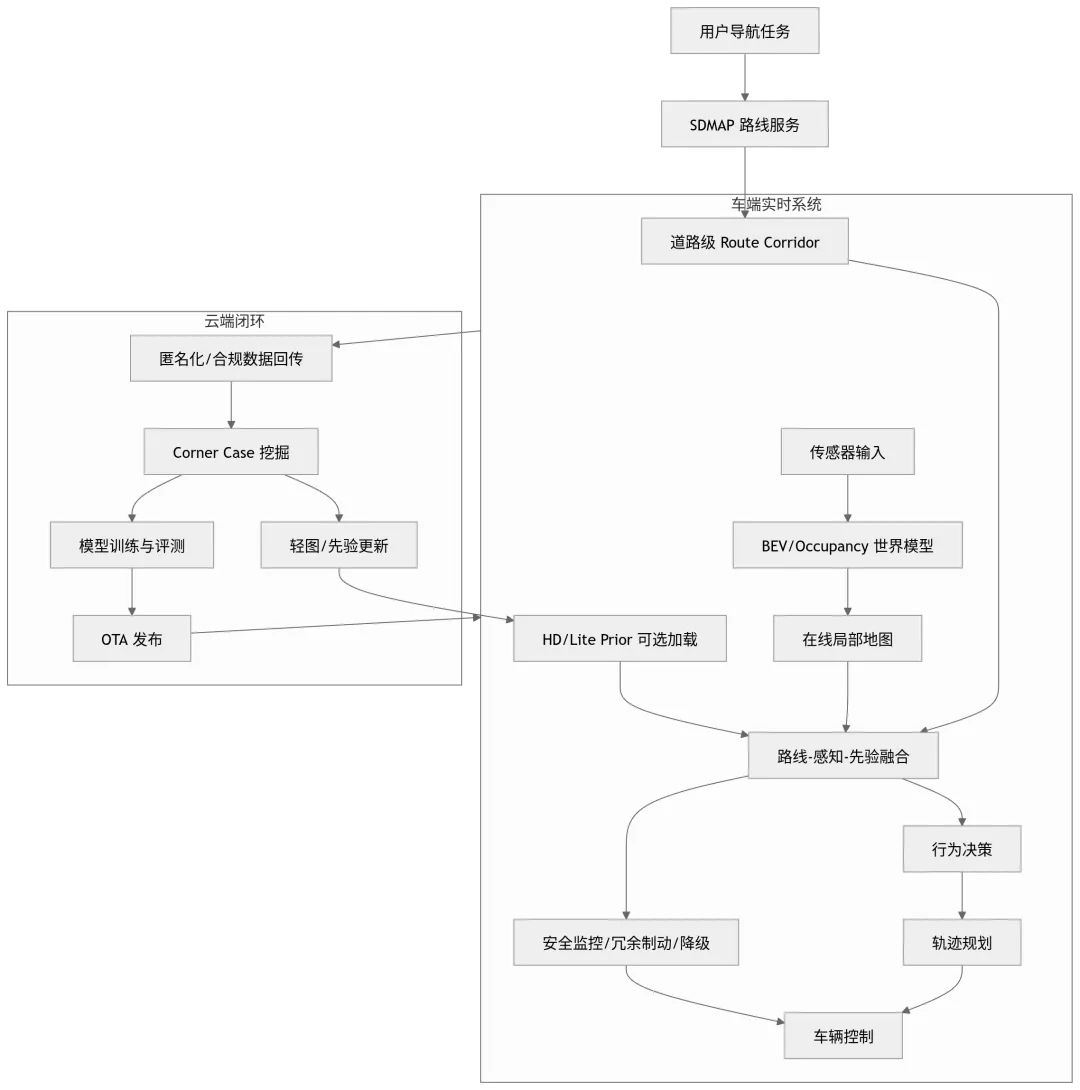
双闭环
车端闭环:感知—预测—规划—控制—安全监控,毫秒级运行。
云端闭环:坏例挖掘—自动标注—模型训练—仿真回放—OTA 发布—地图/轻图更新,天级或周级迭代。
图4:三层地图 + 双闭环示意
十一、工程落地中的几个困难权衡
权衡1:覆盖率与确定性不可同时最大化
无图方案能快速覆盖更多城市,但它的确定性来自模型泛化,而不是逐路段验证。HDMAP 方案确定性更强,但扩城慢。量产车企必须选覆盖率,Robotaxi 必须选确定性。
权衡2:少用地图,会多用算力和数据
HDMAP 把很多静态理解提前算好。无图方案把这些工作放回车端和云端:车端实时推理,云端持续训练。地图成本下降,不代表系统总成本下降,只是成本从地图生产部门转移到算法、算力、数据、仿真和验证部门。
权衡3:端到端越强,安全壳越重要
端到端模型擅长拟合复杂驾驶行为,但自动驾驶不能只追求“像人”。人类司机本身就经常犯错。好的系统应该像人一样理解场景,但不能像人一样冲动、侥幸和情绪化。
所以未来架构大概率不是纯模块化,也不是纯端到端,而是:

模型给“想怎么开”,安全壳决定“能不能这么开”。
权衡4:地图越轻,系统越依赖长尾数据
轻图/无图的真正护城河不是宣传视频,而是坏例库。施工、暴雨、逆光、无标线、异形路口、临时红绿灯、警察手势、非机动车横穿、行人鬼探头、三轮车逆行,这些东西不会因为“端到端”就消失。没有足够真实数据和仿真回放,无图就是把风险从地图里删掉,再让用户在路上发现风险。
权衡5:地图合规会影响技术路线
高精地图采集、生产、传输、审查、更新都有监管约束,中国市场尤其明显。车企转向无图,不只是因为算法进步,也因为高精地图的商业和合规摩擦太大。自然资源部近年来对智能汽车基础地图标准、数据采集和传输安全的管理持续加强,这会继续推动“低依赖 HDMAP”的量产路线。
十二、未来的地图形态:不是 HDMAP 死亡,而是地图神经化
未来几年更可能出现的是四类地图并存。
1. 显式 HDMAP 继续服务 L4 和高风险场景
Robotaxi、无人配送、港口矿山、干线物流、机场园区不会轻易放弃 HDMAP。责任越重,越需要可验证先验。
2. SDMAP 成为量产 NOA 的基础设施
SDMAP 会越来越“ADAS 化”:不只是导航,还会包含更多道路属性、车道数、限速、坡度、曲率、路口复杂度、匝道信息、施工动态和交通规则提示。
HERE 在 HD Live Map 中也强调,自动化系统需要的不只是 HD 内容,还需要动态内容、定位能力和与自动化成熟度匹配的地图能力。
3. 众包轻图成为中间层
车队会不断上传变化、轨迹、语义、易错点。云端不一定生成传统 HDMAP,而是生成压缩过的语义先验:哪里容易误识别、哪个路口灯组复杂、哪段路常年施工、哪条车道实际可通行。这类地图不像传统地图,更像自动驾驶系统的“集体经验库”。
4. 隐式地图进入模型参数
大模型、VLA、端到端驾驶模型会把大量道路结构和驾驶策略压进网络参数。它不会以地图文件存在,但会影响车辆行为。这会带来强泛化,也会带来更强监管挑战。
未来监管也许不只审地图,还要审模型如何使用地理先验、如何更新、如何回滚、如何证明某个区域的行为安全。
十三、结论
HDMAP、SDMAP、轻图、无图不是四个阵营,而是一套分层工具。HDMAP 的本质是高确定性的长期记忆。 SDMAP 的本质是低成本高覆盖的路线意图骨架。 轻图的本质是压缩后的高价值语义先验。 无图的本质是不把离线 HDMAP 作为强依赖,而用在线感知和模型推理补齐局部世界。 端到端的本质是把一部分地图、规则、经验和策略压缩进神经网络。
量产乘用车会继续走 SDMAP + 在线建图 + 神经策略 + 安全壳的路线,因为它最符合规模化商业逻辑。L4 Robotaxi 会继续保留 HDMAP 和多传感器冗余,因为无人责任边界不允许它像 L2 那样把风险转嫁给驾驶员。Mobileye、HERE、TomTom、腾讯地图、高德、百度地图这类地图与技术供应商,则会把传统地图重构成动态、轻量、众包、可服务模型训练和车端推理的“自动驾驶基础设施”。

随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 2027款本田Legend SUV可以期待,但别把它想成“本田版豪华答案”
- 7分22秒,小米YU7 GT跑进纽北SUV历史前三,38.99万值不值?
- 续航2000km+,油耗为零?这台SUV让燃油党看了都心动.
- 中国最大五座SUV 29.29万起 华为四激光雷达 三腔空悬 后轮转向
- 2027款兰博基尼SUV先别急着上头,渲染图很猛,但买它要先想清楚边界
- 最大尺寸的5座SUV该怎么选,今天直接给答案
- 起亚智跑ACE:200匹马力的合资SUV,这套设计你能接受吗
- 平山驰凯汽贸长年销售各品系新能源汽车(轿车、面包、货车),优惠力度大,支持0首付,以租代购,价格美丽
- 东风三款SUV霸气登场!标配华为智驾+六座大空间,这回还要啥合资车?
- 2027款本田Legend SUV先别急着上头,豪华感之外更要看清它适合谁
