不卖关子,先直接上干货:
L3/L4自动驾驶强标规范性附录引用了国标GB/T 45312《智能网联汽车 自动驾驶系统设计运行条件》。
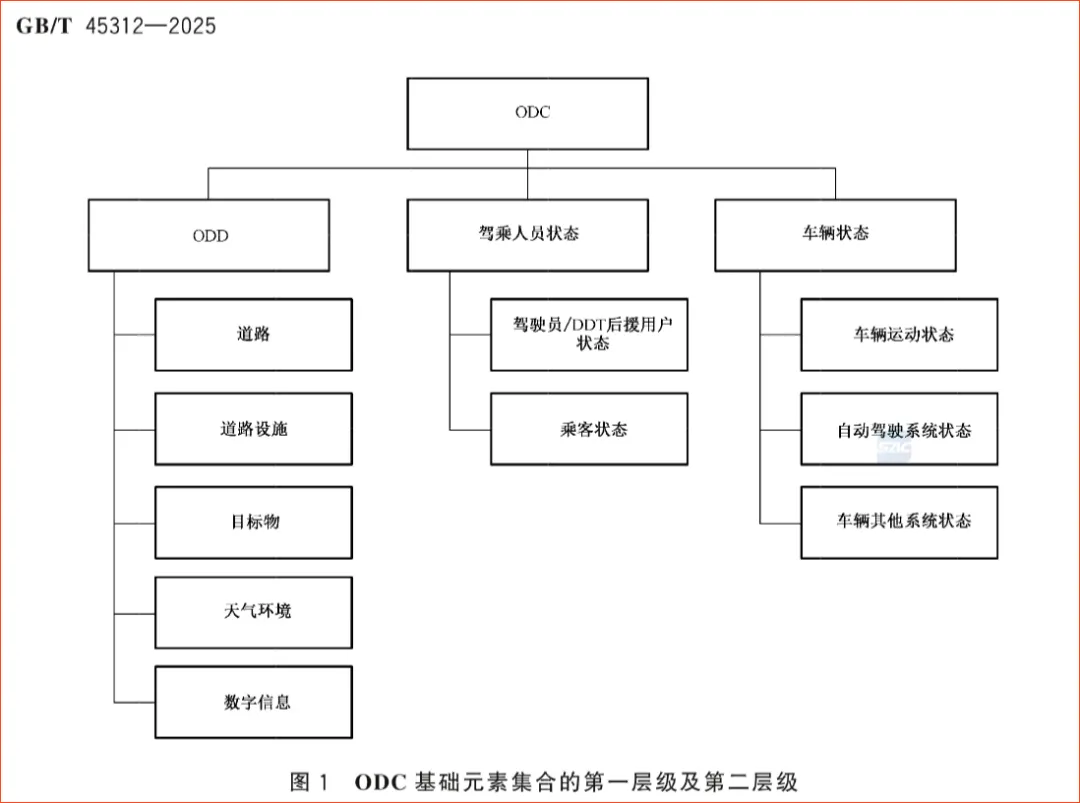
国标GB/T 45312清晰地定义了自动驾驶系统(ADS)设计运行条件(ODC)的基础元素分级。其中,在第一层级设计运行范围(ODD)的下一层级,存在一类基础元素,叫做“数字信息”。
数字信息的下一层级包括无线通信和位置信号两大类。
而无线通信就具体包括V2V、V2I、V2P和V2N这四种与C-V2X相关的ODC基础元素。
这意味着,基于L3/L4自动驾驶强标要求,车企在向监管机构提供其自动驾驶系统功能描述的时候,对于每项功能的ODC定义,是需要专门针对C-V2X进行说明的。
把包含C-V2X通信的数字信息明确写入ODD,并被自动驾驶强标规范性引用,这意味着什么?ElteknikRui认为,这可能是国家监管层面在向车企传递明确信号:基于C-V2X的数字信息将是我国高阶自动驾驶预期运行环境的重要组成部分——等同于道路类型、天气等是“环境的一部分”——当存在C-V2X数字信息时,自动驾驶系统不仅要能够正常运行,还应在ODC/功能设计中体现对这些数字信息的合理运用与失效处理。
--- 正文 ---
2026年6月17日,工业和信息化部(MIIT,以下简称工信部)在其官网发布公示,针对《智能网联汽车 自动驾驶系统安全要求》强制性国家标准(报批稿)公开征求意见。针对该国标,以下简称L3/L4自动驾驶强标,标准号为GB 44721。
引用该强标编制说明的原文,其重要意义是,“制定和实施该强制性国家标准,是落实政策规划、完善自动驾驶标准体系的必要举措,将有助于提升自动驾驶系统安全、可靠运行水平,从源头上防范和化解安全风险,减少交通事故和人员伤亡,降低社会成本,符合社会对高效、安全、环保交通方式的需求。同时,制定和实施该强制性国家标准,有助于推动自动驾驶技术的创新和产业升级,促进产业链上下游企业协同发展,创造更多的就业机会和经济效益。”
简单说,ElteknikRui认为,基于该强标的实施,一方面是坚持底线思维,筑牢自动驾驶规模化商用的安全底线;另一方面则是守正创新,坚守事物发展的正确规律与创立新事物的辩证统一,推动技术创新和产业升级。
当前自动驾驶主要依赖的感知设备,包括摄像头、激光雷达、毫米波雷达等“视线型传感器”,存在先天能力缺陷,那就是它们只能看到它们能看到的物体,但对于那些被遮挡住的、视线之外的物体,就无能为力了,这是一方面。
另一方面,“视线型传感器”对于自动驾驶车辆来说,就只是“眼睛”,但却无法充当“嘴巴”和“耳朵”的作用。形象一些比喻,就是路上跑的自动驾驶车辆只会“看”和“思考”,但却不会“说话”、不会“沟通”,大家就像一群“冷血又自闭的动物”,各跑各的,相互之间完全没有交流。
可能带来的问题是什么?就是交通事故、人员伤亡、社会经济损失。
该怎么解决呢?那就是将无线短距通信技术应用到自动驾驶系统中,赋予自动驾驶车辆超视距感知能力。可是,存在一种标准化的、车规级的、国际认可的、产业成熟的无线短距通信技术吗?
有!已经被国际权威组织3GPP标准化的基于PC5接口的C-V2X直连通信技术。
现在,就让我们一起来探寻L3/L4自动驾驶强标中,那些关于C-V2X的彩蛋。
先来看一下在L3/L4自动驾驶强标中,对于以下几个术语的定义:
设计运行范围(ODD),驾驶自动化系统设计时确定的适用于其功能运行的外部环境条件。例如,典型的外部环境条件有道路、交通、天气、光照等。
设计运行条件(ODC),驾驶自动化系统设计时确定的适用于其功能运行的各类条件的总称,包括设计运行范围、车辆状态、驾乘人员状态及其他必要条件。
最小风险状态(MRC),一种尽可能降低碰撞风险的稳定且静止的车辆状态。
最小风险策略(MRR),自动驾驶系统无法继续安全执行动态驾驶任务时,所采取的使车辆达到最小风险状态的控制策略。
安全概念(Safety Concept),在自动驾驶系统设计时,为保障自动驾驶系统在其ODC相关的各种运行条件下,使其不会对用户和其他道路使用者造成不合理风险所采取的安全措施的描述。
安全档案(Safety Case),通过充分、有说服力且容易理解的方式证明自动驾驶系统符合本文件中相关的自动驾驶系统技术要求且不会对用户及其他道路使用者构成不合理风险的结构化文档。
其中,针对安全档案,L3/L4自动驾驶强标有一项专门的规范性附录D,其中要求车企必须向监管机构提供其自动驾驶系统的功能描述,而功能描述中则包括这样一条内容,“每项自动驾驶功能的ODC如何被定义,并按照GB/T 45312说明其ODC”。
是的,L3/L4自动驾驶强标规范性引用了国标GB/T 45312《智能网联汽车 自动驾驶系统设计运行条件》。
国标GB/T 45312清晰地定义了ODC基础元素分级,其中,在第一层级ODD的下一层级,存在一类基础元素,叫做“数字信息”。
而数字信息的下一层级就包括无线通信和位置信号两大类。它来了~它来了~
首先对于位置信号,其包括全球卫星导航系统和RTK两种ODC基础元素。
而无线通信则具体包括以下四种ODC基础元素:
V2V,描述:车辆与车辆之间的通信;元素要求:应采用“允许/不允许”说明自动驾驶系统对该ODC基础元素的适用性。
V2I,描述:车辆与路侧设施之间的通信;元素要求:应采用“允许/不允许”说明自动驾驶系统对该ODC基础元素的适用性。
V2P,描述:车辆与行人通信设备之间的通信;元素要求:应采用“允许/不允许”说明自动驾驶系统对该ODC基础元素的适用性。
V2N,描述:车辆与网络之间的通信;元素要求:应采用“允许/不允许”说明自动驾驶系统对该ODC基础元素的适用性。
这不就是C-V2X么!这也就意味着,基于L3/L4自动驾驶强标要求,车企在向监管机构提供其自动驾驶系统功能描述的时候,对于每项功能的ODC定义,是需要专门针对C-V2X进行说明的。
举个例子,某一项自动驾驶功能就是依赖V2V车车直连通信去实现的,那么对于这一项功能,它的ODC设计运行条件中,对于ODD->数字信息->无线通信->V2V车车直连通信这一ODC基础元素的元素要求,就肯定是“允许”了。因为V2V不仅不会抑制自动驾驶系统激活和导致自动驾驶系统退出,反而是要去赋能并支撑自动驾驶功能运行的。
或者,某一项自动驾驶功能本身并不依赖V2V车车直连通信技术,但V2V通信的客观存在不会抑制自动驾驶系统激活和导致自动驾驶系统退出,那么这项功能的ODC设计运行条件对于V2V车车直连通信的适用性,就同样会是“允许”。
让我们的思维发散一下,把包含C-V2X通信的数字信息明确写入ODD,并被自动驾驶强标规范性引用,这意味着什么?ElteknikRui认为,这可能是国家监管层面在向车企传递明确信号:基于C-V2X的数字信息将是我国高阶自动驾驶预期运行环境的重要组成部分——等同于道路类型、天气等是“环境的一部分”——当存在C-V2X数字信息时,自动驾驶系统不仅要能够正常运行,还应在ODC/功能设计中体现对这些数字信息的合理运用与失效处理。
▲ ODC基础元素分级,数字信息属于ODD的子层级
L3/L4自动驾驶强标中与C-V2X相关的第一个彩蛋挖出来了,后面还有几个彩蛋与这第一个彩蛋是紧密联系的。我们下一篇文章再见!
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
