Takeover Time Prediction for ConditionallyAutomated Driving Vehicles: ConsideringMixed Trafffc Flow Environment
原文作者:Qingchao Liu , Jiaqi Liu, Jingya Zhao, Yingfeng Cai , Senior Member, IEEE,Hai Wang , Senior Member, IEEE, Long Chen , and Chen Lv , Senior Member, IEEE
发表年份:2025
知识搬运工(翻译者):王子旭
摘要
驾驶员接管有条件自动驾驶车辆(CADV)的时间长短往往受到诸多因素的影响,尤其是混合交通流环境。为了分析混合交通流环境下驾驶员接管时间的影响因素,利用江苏大学提供的 CADV 与雷达视频集成机进行了实车接管实验。基于实车试验数据,采用 DeepGBM 算法和 Shapley 加性解释(SHAP)对接管时间进行预测和分析。结果表明,与其他算法相比, DeepGBM 算法在预测接管时间方面具有更好的准确性。此外,DeepGBM 在平均接管时间场景下的预测效果优于较短和较长的场景。另一方面,在交叉区域接管 CADV 时,驾驶员更加关注车辆的速度。而在非路口区域,驾驶员则更关注与前方车辆的纵向距离差。本研究进一步发现,CADVs 在交叉口区域的接管过程受到显著的横向干扰,显著影响驾驶员的接管时间和车辆安全。本研究可为自动驾驶公司设计接管时间提供理论参考。
1.研究背景与目的
1.1 背景
自动驾驶技术快速发展,但复杂道路场景下 CADV 需驾驶员在突发情况(前车变道、行人横穿)接管车辆,接管时间(从接管请求发出到驾驶员完全控车的时间,范围 2-10s )直接影响行车安全。
1.2 现有研究不足
多数基于仿真数据,与实车场景存在差距;预测方法多为线性回归或传统机器学习,深度学习应用少;较少从混合交通流环境角度分析接管时间。
1.3 研究目的
通过实车实验,构建混合交通流数据集,提出高精度接管时间预测模型,明确不同交通场景下影响接管时间的关键变量。
2.数据集详情
共开展 421 次实验,剔除 19 组无效数据,最终获得 402 组有效数据(Area 1:200 组;Area 2:202 组)。核心变量包括 15 个混合交通流变量,包括 CADV 的横向 / 纵向速度、加速度、坐标、转向角,与周边交通对象的速度 / 距离差异,混合交通流流量、密度、速度等。接管时间分布为:均值 5.927s,中位数 5.530s,范围 1.872-11.860s,其中(5,6] s 区间数据最多(114 组),(0,3] s 区间最少(15 组)。
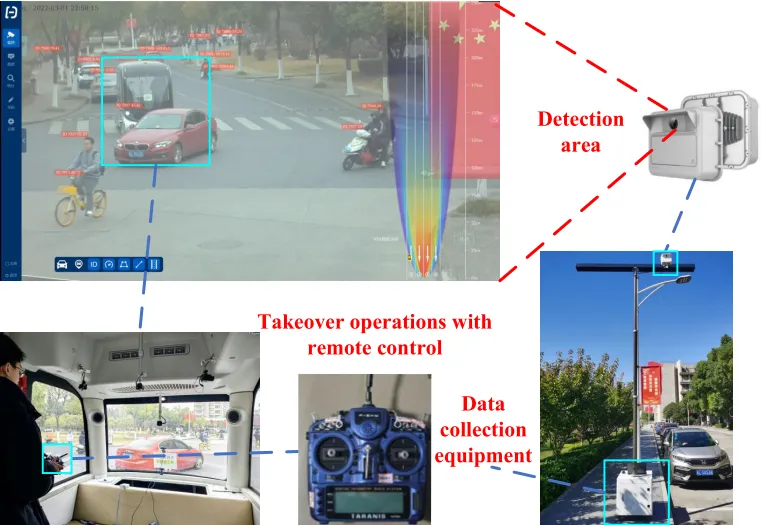
所用 CADV 如图 1 所示;实际车辆实验场景如图 2 所示。
图1 CADVs: (a)江苏大学CADVs一侧;(b) CADVs路线图;(c)用于接管CADV的遥控器。
3.研究方法
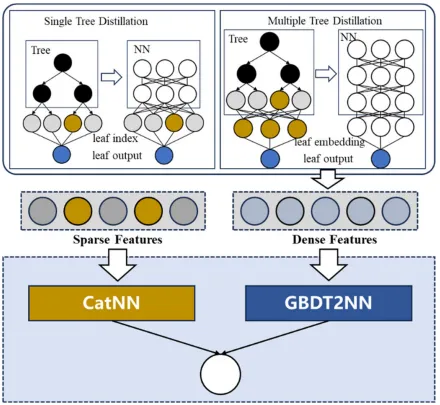
DeepGBM 模型:融合 GBDT 与神经网络,分为 CatNN(处理稀疏分类特征,通过嵌入层 + FM + 深度学习捕捉特征交互)和 GBDT2NN(提取 GBDT 知识,通过叶节点嵌入、树结构蒸馏优化密集数值特征处理)。超参数:树数量 100,学习率 0.1,最大叶节点数 64,批次大小 256。DeepGBM 模型框架如图 3 所示。
解释模型:SHAP (Shapley additive explanation),通过全局解释明确变量整体影响,局部解释分析单个案例变量贡献,单位与接管时间一致(s)。
对比模型:LR(线性回归)、GBDT、LightGBM、Transformer 等。
4.实验结果
4.1 模型性能对比
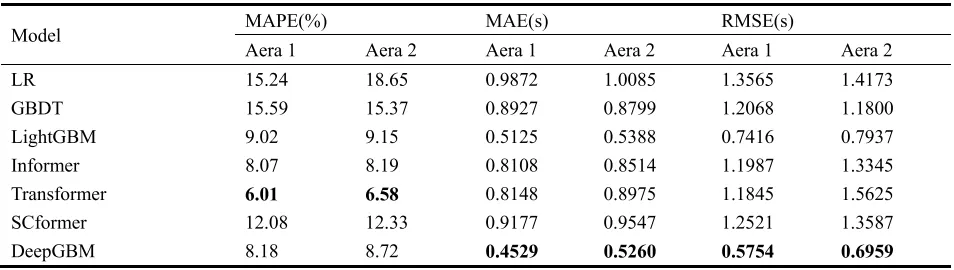
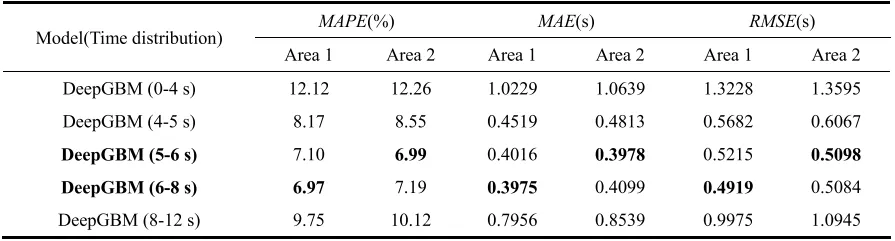
不同模型的评价结果统计如图 4 所示,不同接管时期 DeepGBM 接管时间预测性能对比如图 5 所示。虽然 Transformer 的 MAPE 略低于 DeepGBM,但其整体性能稍差。DeepGBM 对中等时长(5-8s) 接管时间的预测效果最优,短时长(0-4s)和长时长(8-12s)预测误差较大。
图5 不同接管时期 DeepGBM 接管时间预测性能对比
4.2 SHAP 解释结果
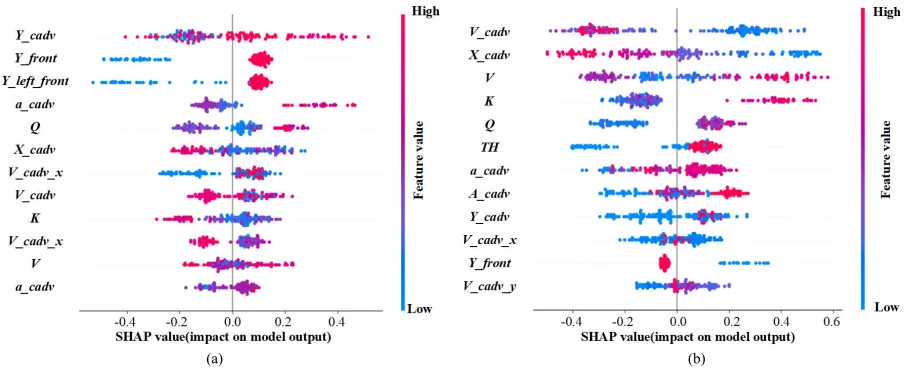
全局解释:呈现混合交通流变量对接管时间的影响。影响预测概率的前 10 个关键变量的 SHAP 值密度散点图如图 6 所示。
图6 影响预测概率的前 10 个关键变量的 SHAP 值密度散点图: (a) Area 1; (b) Area 2。
非交叉口(Area 1):关键变量为 CADV 纵向位置(Y_cadv)、与前车纵向距离(Y_front)、左前方车辆纵向距离(Y_left_front),驾驶员更关注纵向距离差异以维持安全车距。交叉口(Area 2):关键变量为 CADV 综合速度(V_cadv)、横向位置(X_cadv)、混合交通流速度(V),驾驶员更关注车速与横向位移以规避突发风险。
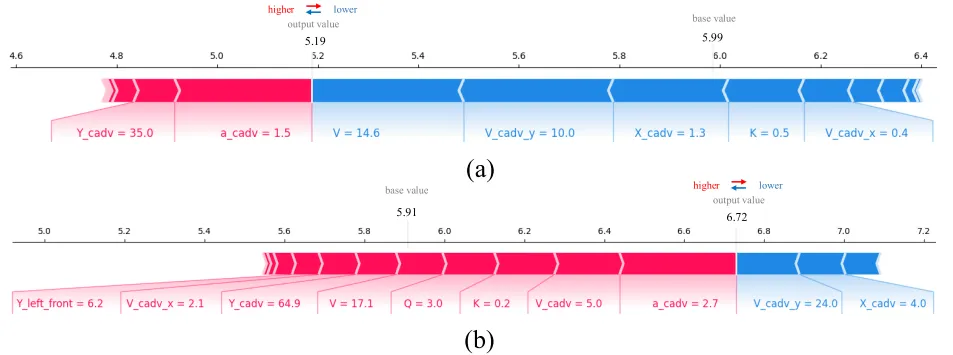
局部解释:为了解释使用局部解释 (SHAP) 的个别预测案例,在区域 1 和区域 2 各选择了一个案例绘制受力图,如图 7 所示。
图7 SHAP 值案例解释: (a) Area 1; (b) Area 2。
为每个流量变量分配一个 SHAP 值,如颜色条的长度所示,以指示其对接管时间预测的贡献。色条越长,该交通流变量对预测概率的贡献就越显著。红色变量(如 a_cadv=2.7m/s²)正向提升接管时间,蓝色变量(如 V_cadv_y=24.0m/s)反向降低接管时间,所有变量共同作用形成最终预测值。
轨迹分析:非交叉口(Area 1):接管过程轨迹更平滑,横向位移小,自动模式(红色轨迹)与手动模式(灰色轨迹)过渡平稳。交叉口(Area 2):接管轨迹横向位移显著,尤其是穿越斑马线后,手动模式轨迹转向角大,因非机动车辆、行人突发横穿导致横向干扰强,接管风险更高。
5.研究结论与局限
在混合交通流环境下,DeepGBM 算法在 CADV 接管时间预测中表现最优,既能保证预测精度,又能高效处理各类特征。由于不同区域的关键影响变量存在显著差异,接管策略需针对性优化 —— 交叉口需重点控制车速与横向位移,非交叉口则应优先关注与前车的纵向距离,同时交叉口的横向干扰也是影响接管安全的重要因素。
本研究局限在于:实验路段为校园低车速场景(车速 5-15km/h),缺乏城市主干道、高速公路等更复杂场景的数据支撑,且接管方式采用遥控操作,与实际驾驶中的方向盘接管存在差异。基于这些局限,未来研究可进一步拓展不同城市道路场景,深入分析混合交通流因素对 CADV 接管时间的具体影响。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
