2. 方法描述
基于 ODD 的行为能力和场景识别方法基于以下要素的相互作用:
(a) 行为能力和场景生成
(b) 能力和场景映射
(c) 假设
(d) 性能和验收标准评估
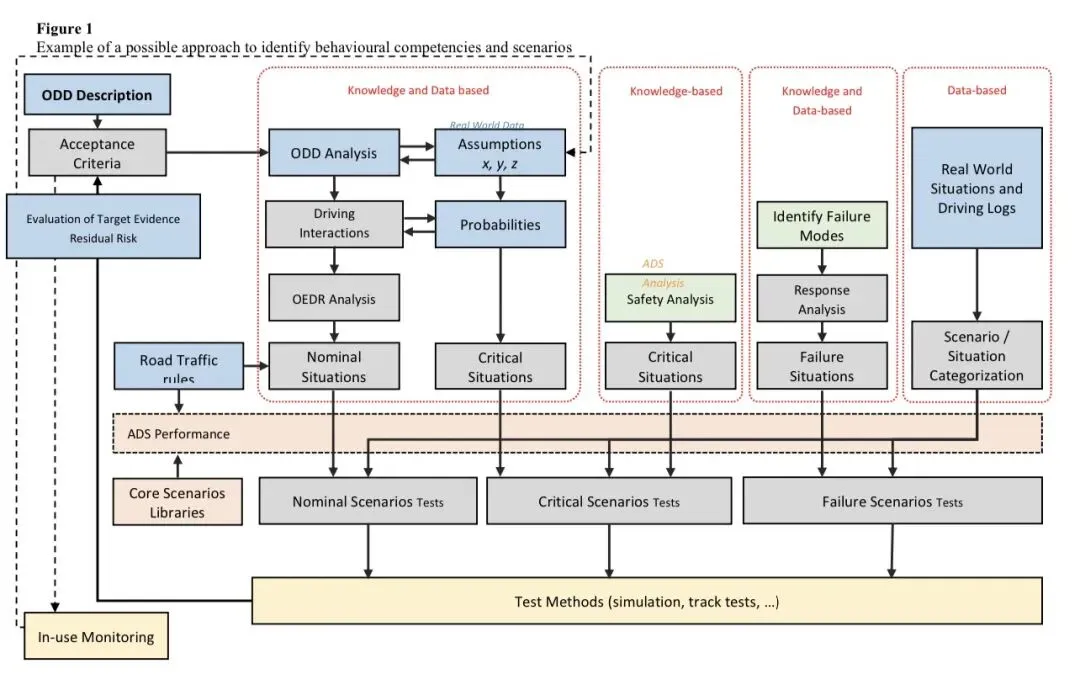
下图描述了整体方法。一旦基于总体要求定义了验收标准,便使用不同的方法(如下所述)生成正常、紧急和故障场景测试。使用各种测试方法进行测试,并评估结果以查看是否有足够的证据支持安全论证的声明和验收标准。以下部分描述了不同的阶段和步骤。
2.1 行为能力识别
该方法提出了一系列分析框架,可帮助推导适用于特定应用的可衡量标准。这些框架分为:
(a) ODD 分析
(b) 驾驶交互分析
(c) 物体和事件探测与响应 (OEDR) 分析。
2.1.1 ODD 分析
此分析是第一步,目的是识别 ODD 的特征。ODD [规范/描述] 可以包括静态物理元素(例如,物理基础设施)、环境条件、动态元素(例如,合理预期的交通水平和构成、弱势道路使用者)以及对特定 ADS 应用的运行限制。[各种来源为精确确定特定 ODD 的元素及其格式定义提供了有用的指导....]
2.1.2 驾驶交互分析
在驾驶交互分析中,通过映射具有适当属性的参与者并定义对象之间的交互,更详细地探讨 ODD 中合理预期的其他道路使用者行为以及道路特征的存在。
下表给出了此分析的一个示例,其中描述了ADS在其ODD内合理预期会遇到的其他物体(包括其他道路使用者)的静态和动态行为。就车辆而言,这包括“加速”、“减速”、“切入”等行为;对于行人,动态行为的例子包括“横穿道路”、“在人行道上行走”等。
| 元素 | 事件和交互示例 |
车辆(例如汽车、轻型卡车、重型卡车、公共汽车、摩托车等)
| 领先车辆减速 |
| 领先车辆停了下来 |
| 领先车辆加速 |
| 变道 |
| 切入 |
| 转向 |
| 侵占对向车道 |
| 侵占相邻车道 |
| 进入道路 |
| 切出 |
| 行人 | 横穿马路:在人行横道内 |
| 横穿马路:在人行横道外 |
| 走在人行道/路肩上 |
| 自行车手 | 在本车道上骑行 |
| 在相邻车道骑行 |
| 在专用车道骑行 |
| 在人行道/路肩骑行 |
| 横穿马路:在人行横道内/外部 |
| 动物 | 车道内静止 |
| 进入/离开车道 |
| 在相邻车道静止/移动 |
| 在路肩静止/移动 |
| 碎片 | 车道内静止 |
| 其他动态对象(例如购物车) | 车道内静止 |
| 进入/离开车道 |
| 交通标志 | 停止 |
| 礼让 |
| 限速 |
| 人行横道 |
| 铁路横穿 |
| 学校区域 |
| 车辆信号 | 转向灯 |
其他道路使用者的行为以及ODD内物理物体的状况可能处于可能性连续统上的任意一点。
例如,其他车辆的减速行为可能包括在交通情况下预期且合理的减速,到不合理但有一定可能性的急减速,再到极不可能发生的情况(例如,在畅通的高速公路上突然切入并结合全力制动)。
对ODD及ODD内合理预期驾驶情境的分析应加以区分,包括对情境可能性的估计,以确保ADS性能的评估是基于对涉及正常、紧急和故障情境的合理可能事件的响应,而不是基于期望ADS能避免或减轻最极不可能发生的事件。
2.1.3 物体和事件探测与响应(OEDR)分析:行为能力识别
一旦识别了物体及其合理预期的行为,就可以映射出适当的ADS响应,这可以表达为一种行为能力。详细的响应源自更通用和适用的安全要求。可接受的ADS响应将根据驾驶情境涉及正常、临界还是故障特征而变化。
该分析的结果是一套可应用于表征ODD事件的行为能力。下表提供了一个匹配事件-响应的定性示例。
| 事件 | 响应 |
| 领先车辆减速 | 跟随车辆,减速,停车 |
| 领先车辆停下 | 减速,停车 |
| 领先车辆加速 | 加速,跟随车辆 |
| 领先车辆转向 | 减速,停车 |
| 车辆换道 | 让行、减速、跟车 |
| 车辆切入 | 让行、减速、停车、跟车 |
| 对向车辆侵占本车道 | 减速、停车、车道内偏移避撞、车道外偏移避撞 |
| 相邻车辆侵占本车道 | 礼让,减速,停止 |
| 前车切出 | 加速,减速,停止 |
| 行人横穿道路 | 礼让,减速,停止 |
| 骑自行车的人在本车道 | 礼让,跟随 |
| 自行车穿越道路 | 礼让,减速,停止 |
作为ODD的函数,物体、事件及其潜在相互作用的组合构成了与分析中的ADS相关的一系列潜在情境。
2.2 场景识别
为确保前几段中识别的行为能力已准备好接受评估,必须识别与ODD相关的[场景和情境]。
可以通过将场景描述聚焦于特定方面,同时将其他细节留待进一步处理,在不同的抽象级别(即功能级、抽象级、逻辑级和具体级)描述场景。
(a)功能场景Functional Scenario:在概念层面上用自然语言描述的场景,一般没有具体的物理值。这些是具有最高抽象级别的场景,概述了场景的核心概念,例如自动驾驶车辆动作的基本描述;自动驾驶车辆与其他道路使用者和物体的交互;以及构成场景的其他元素(例如环境条件等)。这种方法使用可理解的语言来描述情况及其相应的元素。
(b)抽象场景Abstract Scenario:对功能场景的形式化、声明性描述(声明性描述可以包括结构化的自然语言、编程语言或满足所需标准(形式化和声明性)的其他形式的语言)。抽象级别的规范可以突出场景的相关方面,同时专注于关系(因果关系)的有效描述。
(c)逻辑场景Logical Scenario:包含参数的场景,其中一些参数的值被定义为范围。例如,基于功能场景中确定的元素,开发人员通过为场景中的每个元素选择范围或概率分布(例如,以米为单位的车道可能宽度)来生成逻辑场景。
(d)具体场景Concrete Scenario:用明确的参数值描述物理属性的场景。通过为每个元素选择特定的值来建立具体场景。此步骤确保特定的测试场景是可复现的。此外,对于每个具有连续范围的逻辑场景,可以开发任意数量的具体场景,有助于确保车辆暴露于各种可能情况下。
在为特定ADS及其ODD创建用于ADS验证的逻辑和具体场景时,可以使用抽样技术来选择参数,以避免ADS针对一组已知测试用例进行优化。
该方法建议采用互补的方法论来推导给定ODD下可能发生的合理预期场景:
(a) 基于知识的方法
(b) 基于数据的方法
(c) 基于目标的方法。
知识驱动的场景生成方法利用领域特定(或专家)知识系统地识别正常、紧急和故障事件,并创建场景。知识驱动的场景生成方法示例包括:
(a) ADS开发过程中获得的经验
(b) 通过关键参数变化综合生成的场景
(c) 基于功能安全要求和预期功能安全性设计的场景
(d) 由基本场景组合成复杂场景
(e) 场景参数(包括ADS和其他道路使用者)的随机变化。
数据驱动的方法利用可用数据来识别和分类发生的场景。数据驱动的场景生成方法包括:
(a) 分析人类驾驶员行为,包括评估自然驾驶数据
(b) 来自事故数据库、保险记录和执法机构的碰撞数据
(c) 来自真实世界驾驶日志的与ODD相关的交通模式
(d) 使用装备仪器的车辆、ADS车辆的传感器、基础设施或无人机记录的情境
(e) [参考在役监控报告 (ISMR)]
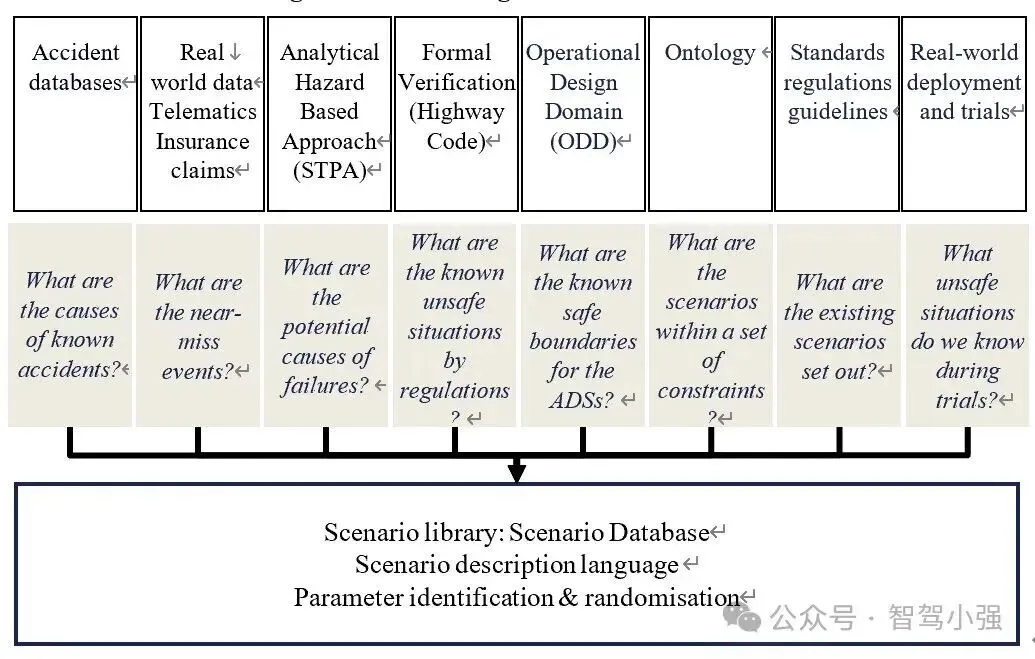
下图展示了各种基于数据和基于知识的场景生成方法。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
