本文系统介绍车载GNSS。
1、GNSS的四大特性
GNSS(全球导航卫星系统)的“四性”通常是指精度、完好性、连续性和可用性。这四个指标是衡量一个全球导航卫星系统服务性能和可靠性的关键方面。
- 精度 (Accuracy):指系统能够将用户定位到真实地理位置的精确度。它衡量的是导航信息的准确性。
- 完好性 (Integrity):指系统在出现故障或误差超出服务性能要求时,能够及时向用户发出告警的能力,确保用户不会因为错误信息而造成危险。
- 连续性 (Continuity):指在规定的服务区域和时间段内,系统能够持续提供导航定位服务的概率。
- 可用性 (Availability):指在用户尝试使用系统时,系统能够正常工作的概率和时间。
2、GNSS的精度
GNSS 精度的保证是一个多层次、全链路的系统工程:从卫星层面的精密时钟与星历、大气模型与多频技术,到地面基准站网络、差分/RTK/PPP的实时修正,再到硬件选型、天线布设、质量监控,每一步都在削减误差、提升可靠性。
自动驾驶需要实现车道级定位精度,水平需要满足车道宽度(≈ 3.5 m)内的定位误差,以保证车道保持和路径规划的安全性。例如L3 以上 ≤ 0.5 m;L4 ≈ 0.3 m;L5 ≤ 0.1 m。
在自动驾驶中,可以通过以下几种方式来提升精度
GNSS + RTK(载波相位差分):RTK 和标准 GNSS 定位测量卫星距离的方式不同。传统 GNSS 使用基于代码的测距,测量信号从卫星传输到接收器所需的时间。相比之下,RTK 使用基于载波的测距,依赖于信号载波的相位。
基于载波的测距提供了更高的精度,因为 L1 信号的波长为 19 厘米,而在传统 GNSS 中,代码频率的长度对应的波长约为 300 米。然而,载波信号不包含时间戳,因此很难确定卫星和接收器之间的完整波长数量。为了解决这个问题,RTK 采用整数模糊度解算 (IAR) 技术,该技术可以精确计算这些波长,从而实现厘米级定位。
为了确保 IAR 成功,RTK 系统需要校正数据。这些数据由附近具有精确已知位置的参考站提供,或者在网络 RTK 的情况下通过参考站网络提供。网络 RTK 通过更有效地建模信号误差,提高了更广阔区域的定位精度。
单站 RTK 是最简单的 RTK 解决方案,它利用靠近 GNSS 接收机的单个参考站。由于参考站位于测量位置,它可以估算每个接收到的 GNSS 信号的误差。将误差修正传送到用户接收机后,即可进行 IAR。如果用户与参考站之间的距离较短,则单个参考站就足够了。当用户与参考站之间的距离过大(通常超过 25 公里)时,两个位置的大气条件可能会有所不同。这可能会导致 IAR 失败。
网络 RTK (nRTK) 更进一步,利用多个参考站而非单个基站。这可以实现更精确的误差建模,提高更大范围的精度,并最大限度地减少对单个参考站的依赖。使用参考站网络时,RTK 解决方案的覆盖范围显著扩大,且精度不会受到影响。
利用参考站网络,可以更精确地模拟与距离相关的误差。基于这种建模,对距离最近参考站的依赖性显著降低。在 nRTK 校正服务中,流动站连接到网络处理器提供的校正源,参考站通常从中抽取。这种方法可以在整个服务区域提供更准确的校正,从而降低参考站网络的密度。由于它对单个参考站的依赖性较小,因此可靠性也更高。
- 基站与车载接收机实时差分,水平误差可达 1 ~ 2 cm。
- 需要覆盖密集的基站网络(每基站约 10 km 覆盖半径)。
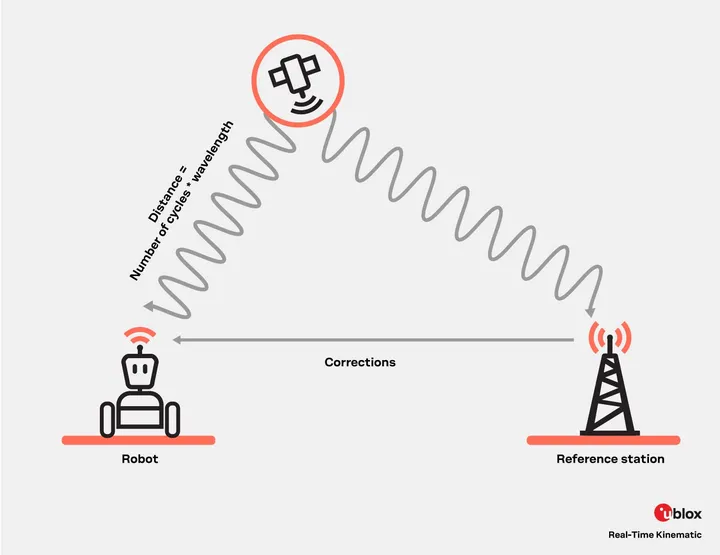 图1 RTK系统概览
图1 RTK系统概览Ref:https://www.u-blox.com/en/technologies/rtk-real-time-kinematic
GNSS + PPP(精密单点定位):PPP(Precise Point Positioning)是一种基于单台 GNSS 接收机的高精度定位技术。它不依赖本地基准站,而是利用IGS(International GNSS Service) 等组织提供的精密星历、精密钟差等产品,对原始伪距和载波相位观测进行模型校正和参数估计,从而实现厘米级(静态)或分米级(动态) 的定位精度。核心要素如下
要素 | 作用 | 关键技术 |
|---|
双频或多频观测 | 通过载波相位消除电离层延迟 | LC、IF 组合 |
精密星历 & 精密钟差 | 替代广播星历/钟差,误差降至厘米/亚纳秒级 | IGS 实时/快速/最终产品 |
大气延迟模型 | 对流层延迟进行 Saastamoinen、VMF3 等模型校正;电离层通过双频组合消除 | |
天线相位中心偏差(PCV) | 消除天线引入的相位误差 | PCV 校正表 |
参数估计方法 | 最小二乘或卡尔曼滤波求解位置、钟差、模糊度、对流层延迟等 | |
多系统融合 | 同时使用 GPS、GLONASS、北斗、Galileo 等,提高卫星可见度和几何强度 | |
- 通过全球精密轨道和时钟数据校正,适合大范围部署,收敛时间 30 ~ 60 s,可实现 10 cm 级精度。
PPP 的优势
- 全球统一:不受基准站分布限制,任何地点均可实现高精度定位。
- 设备简化:只需单台双频接收机,无需布设 CORS/RTK 基站。
- 高精度:在收敛后可达 厘米级(静态)或 分米级(动态)。
- 多行业适用:精密农业、工程测量、海上航行、地球科学、时间传递等。
主要挑战
- 收敛时间长:传统 PPP 需要数分钟到数十分钟才能固定模糊度,导致实时性受限。
- 信号遮挡:城市峡谷、隧道等环境下观测中断会导致重新收敛。
- 对高质量观测的依赖:需要双频或多频、低噪声接收机以及完整的观测记录。
使用流程简述
- 采集观测:双频(或多频)GNSS 接收机记录伪距 + 载波相位。
- 获取精密产品:从 IGS、BDS、Galileo 等下载实时/快速/最终星历、钟差、PCV 表。
- 模型校正:对电离层、对流层、天线相位中心等进行校正。
- 参数估计:使用卡尔曼滤波或最小二乘法解算位置、钟差、模糊度、对流层延迟等。
- 结果输出:得到高精度三维坐标(WGS‑84)及其误差估计。
PPP 是一种定位技术,它通过消除或模拟 GNSS 误差,从而通过单个接收机提供高水平的定位精度。PPP 解决方案依赖于由全球参考站网络生成的一组校正值。校正值计算完成后,会通过卫星或互联网发送给最终用户。接收机使用这些校正值来提高定位精度。
典型的 PPP 解决方案需要一段时间才能收敛到完全精度,以解决任何局部误差,例如大气误差、多路径和接收机偏差。实际达到的精度和所需的收敛时间取决于校正的质量及其在接收机中的应用方式。借助先进的校正和接收机技术,一分钟内可实现高达 2.5 厘米(0.98 英寸)的精度。
PPP 系统的结构与 SBAS 类似,它向接收器提供校正信息以提高定位精度。然而,PPP 系统通常提供更高的精度,并且需要付费才能访问校正信息。PPP 系统还允许在全球范围内使用单一校正流,而 SBAS 则仅限于区域性应用。典型的 PPP 系统下所示。通过建模、估计和应用外部修正,可以减轻影响 PPP 的误差源。
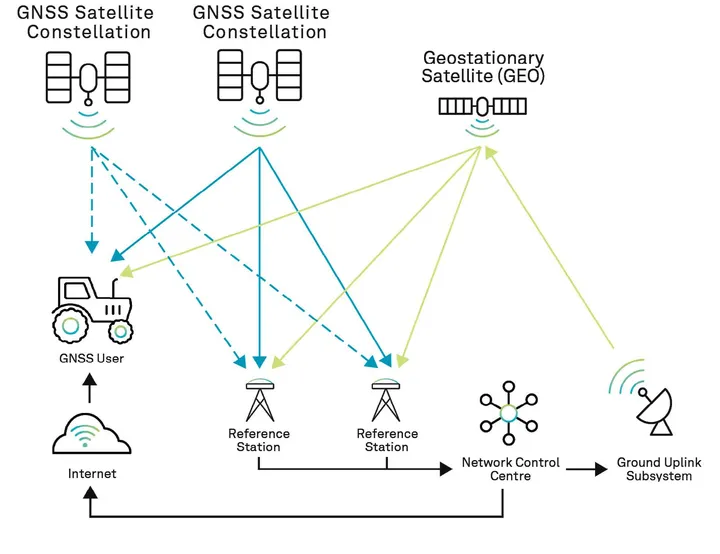 图2 精密单点定位(PPP)系统概览
图2 精密单点定位(PPP)系统概览PPP 校正提供商提供校正数据,以考虑卫星时钟、轨道和偏差。在某些地区,校正数据流中还可以提供大气校正。校正数据通常通过卫星或互联网连接提供。
PPP服务提供商运营着一个地面参考站网络,用于收集每颗卫星发射的不同信号的校正数据。根据这些数据计算出的校正值会通过地球静止卫星广播到订阅用户的接收器。
Ref:https://novatel.com/an-introduction-to-gnss/resolving-errors/ppp
多频多星组合(GPS、北斗、GLONASS、Galileo):GNSS多频多星组合定位是一种提高定位精度的技术,通过同时接收来自多个不同卫星导航系统(如GPS、北斗、GLONASS、Galileo)的信号,并在不同频率上进行测量,来克服单系统或单频点在信号遮挡、多径效应等情况下的精度下降问题。这种组合方式能显著增加可用卫星数量和信号质量,从而提供更可靠、更精确的位置和时间信息。
主要优势
- 精度更高:同时接收更多卫星的信号,可以利用更多的冗余信息来提高精度。
- 可用性更强:在复杂的城市峡谷或遮挡环境中,更容易搜索到足够多的卫星信号,从而实现定位。
- 可靠性提升:不同系统的信号具有不同的特性,组合使用可以提高抗干扰能力和定位的鲁棒性。
技术原理
- 多星:利用多个卫星导航系统(GPS、北斗、GLONASS等)提供卫星信号,用户接收机同时跟踪来自不同系统的多颗卫星。
- 多频:接收机使用多个频率(如L1、L2、L5)的信号进行测量。不同频率的信号对大气层电离层延迟的敏感度不同,组合多频测量可以有效消除或减弱电离层延迟误差。
GNSS + IMU(紧耦合):
- 在 GNSS 信号遮挡(隧道、桥下)时,IMU 提供短时姿态/速度补偿,保持定位连续性。
融合高精度地图:
- GNSS 为全局基准,地图匹配提供车道级细化定位,进一步降低对 GNSS 单独精度的依赖。
另外最近还推出了PPP+RTK:可以参考下文
Ref:https://www.eet-china.com/mp/a246556.html
3、GNSS定位方法
对GNSS常用定位方法进行汇总和对比如下
定位方法 | SPP | RTD | RTK | SBAS | PPP | PPP-RTK |
|---|
观测值 | 伪距 | 伪距 | 载波相位 | 伪距 | 伪距+载波相位 | 伪距+载波相位 |
定位模式 | 绝对 | 相对 | 相对 | 相对 | 绝对 | 绝对 |
通信链路 | 不需要 | 需要 | 需要 | 需要 | 需要 | 需要 |
频率 | 单频/双频 | 单频 | 双频居多 | 单频 | 三频/双频 | 三频/双频 |
平面精度 | 双频<5m
单频3-10m | <1m | 1cm+1ppm | <1m | <10cm
<1m | <10cm |
覆盖范围 | 全球 | 100km | 20km | 1000km | 全球 | 区域 |
Ref:GNSS RTD是什么
Ref:https://novatel.com/an-introduction-to-gnss/resolving-errors/sbas
- 低自动化(L2):米级定位即可满足,但仍需可靠的更新率和完整性。
- 中高级自动化(L3‑L4):分米至亚分米级(≈ 0.3 m)是安全上车道保持、路径规划的基本门槛,通常通过双频 GNSS+RTK/PPP 实现。
- 完全无人驾驶(L5):厘米级(≤ 10 cm)定位是实现无人工干预、全场景安全运行的关键,需三频 GNSS、载波相位、全球或区域差分网络以及高频 IMU 融合。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
