随着新能源汽车产业的快速迭代,自动驾驶已从“科幻概念”走进现实,成为衡量汽车智能化水平的核心指标,更是全球汽车产业竞争的新赛道。从日常通勤中的辅助驾驶,到高阶智驾的逐步落地,自动驾驶的发展不仅改变着人们的出行方式,更牵动着感知、芯片、算法等全产业链的布局与升级。本文解析自动驾驶产业链,把自动驾驶的核心逻辑和行业现状,一次性讲清楚。
行业内普遍把自动驾驶分为五个等级。其中L0为完全人工驾驶,L1-L2为部分辅助驾驶,从L3-L5由部分自动驾驶逐渐向完全自动驾驶过渡。
L0:提供警告和瞬时协助,如AEB(自动紧急制动 )、车道偏离警告等。
L1:借助感知系统对车辆做单一方向的运动控制/辅助,如车道居中LCC(横向运动控制,方向盘)或自适应巡航ACC (纵向运动控制,油门/刹车)。
L2:同时提供纵向和横向控制。如自动泊车。
L2+:高速公路/快速路/城市道路领航辅助驾驶(高速/城市NOA),但是人类仍然是驾驶主体,需要保持观察环境。
L3:系统是驾驶主体,人类不需要观察环境,只有系统请求时,人类需要接管。
L4:系统是驾驶主体,人类不需要接管,但有特定道路和环境条件要求。
L5:在所有条件下随处行驶,人类不需要接管。
目前最常见的是给汽车L2级自动驾驶能力的,可以直接让汽车自主超车、变道、汇入主路、停车入库等,整体仍处于L2–L2+级别(部分场景接近L3能力),还没有实现法律意义上的全面L3或以上。
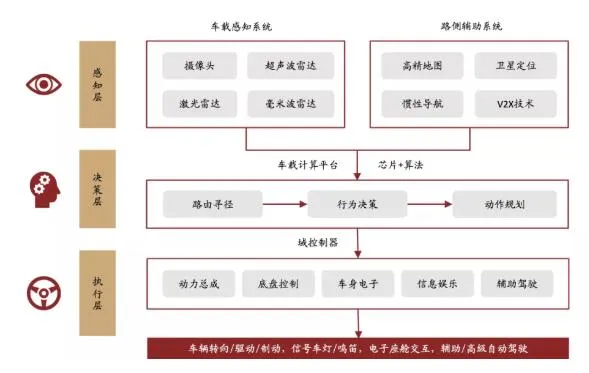
自动驾驶基本上依赖于感知、决策、执行三个环节的高效配合。用一个通俗的类比理解:人之所以能熟练开车,靠的是能操控车辆的手脚(执行环节)、能判断路况的大脑(决策环节),以及能感知周围环境的眼睛和耳朵(感知环节)。同理,汽车只要具备对应的核心能力,理论上就能实现自动驾驶。
1.真实路况的复杂性
自动驾驶不是考试100分,而是要在所有极端情况都不犯错。突然冲出的行人、别人的不规范驾驶、极端天气影响摄像头(大雾、雨雪)、出车祸如何定责任?
2.技术路线和成本问题
现在行业分两派:激光雷达派(大多数)和纯视觉派(特斯拉)。激光雷达可以看得更精准,但是一套车规级激光雷达成本就要几千美元(早期甚至上万美元),你在路上看到新能源汽车头顶上一个凸起,那就是激光雷达。
当然,自动驾驶真正的核心,其实是车里的那块“计算大脑”。当一辆车在路上行驶时,它每一秒都在同时处理这些信息:摄像头视频流、激光雷达云数据、毫米波雷达速度与距离信息、地图、定位。然后系统要在不到0.1秒内完成识别、判断、决策三个动作。这三步,本质就是:实时AI推理 + 实时决策控制。因此,自动驾驶本质上是一项‘算力 + 数据 + 资本’的综合竞赛。自动驾驶芯片算力高,就需要散热,更需要稳定。车开在高速上,不能像手机卡机一样重启,争分夺秒都是生命安全。
目前决定自动驾驶性能的主要是感知和决策层。随着端到端的普及,自动驾驶性能主要由感知层和决策层的硬件设备和软件算法决定。感知设备决定自动驾驶可视范围和精度,芯片算力、软件算法决定了响应速度和决策能力。
1.感知层:摄像头和雷达
汽车智能驾驶感知系统主要包括视觉感知、超声波感知、毫米波感知和激光感知。
L0-L1:通过车前后的超声波雷达或毫米波雷达、摄像头即可实现。
L2:需要实现加减速和转向功能, 因此需要额外安装在两车身侧边的超声雷达,以及分布在车身前、后、左、右的4颗环视相机。
L2+-L4:为了实现提升感知精度,并且应对恶劣天气,额外加装激光雷达。
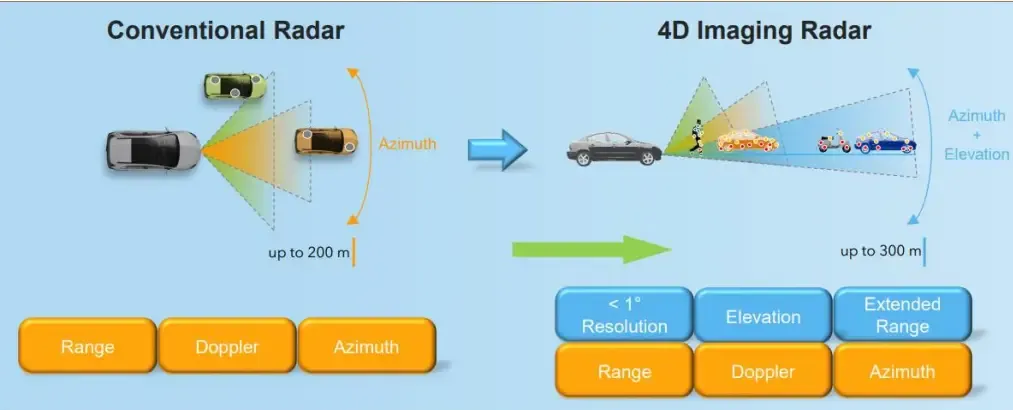
毫米波雷达:3D切换向4D。自动泊车、自动巡航、 自动紧急制动等功能都需要毫米波雷达对周围环境进行感知,通过测速测距测方位传回数据,芯片对信息进行智能处理后才得以实现。传统的毫米波雷达是3D毫米波雷达,主要用于测角、测距和测速,但是它对低速和静止目标检测不稳定,不能支持自动驾驶汽车在通过路口时对排队同行等多种情况做出反应。后来出现的4D毫米波雷达有出色的水平和垂直的角度分辨能力,并可对静止障碍物进行识别协助避障,一定程度上弥补了这些缺点。
激光雷达:高阶智驾配置。激光雷达+视觉融合方案是成绩最好的感知能力表现。激光雷达通过发射激光束并比较发射信号和反射信号来刻画目标参数,测距精度可达厘米级,可以帮助车辆执行变道并线、汇入车流等驾驶操作。 同时 ,激光雷达可以结合基于BEV( Bird’s- Eye-View)技术将视觉图像信息从2D转换为3D ,构建环境的三维图像,从而提高感知算法上线,减小对高精地图的依赖程度。
速腾聚创CEO邱纯潮曾表示:一辆15万元的车,一般能够给智驾系统留的钱大概是车身售价的4% ,6000块钱的系统成本,没有办法配备激光雷达,只能忍痛把激光雷达割掉。这也是特斯拉一直坚持纯视觉方案的重要原因。车载摄像头成本仅为几百元,而激光雷达成本早期高达几万元。 经过进一步降本,速腾聚创 、禾赛等厂商激光雷达已经降低到千元级别。
2.决策层:芯片算力决定上限,软件算法定义体验
如果说感知层是车辆的“眼睛”和“耳朵”,那么决策层就是自动驾驶的“大脑”。这个“大脑”由两大核心构成:提供算力的硬件芯片,以及运行其上的软件算法。两者的协同进化,共同决定了自动驾驶系统的智能水平、反应速度与最终体验。
硬件基石:算力竞赛与国产替代
芯片是承载所有算法运算的物理基础,其算力直接决定了系统能有多“聪明”。当前,智驾芯片市场呈现出清晰的格局分化:智驾芯片高阶英伟达、中低阶用国产。 目前主流车厂中高阶智驾一般搭载多块英伟达Orin、Thor系列芯片, 中低阶智驾对于算力要求相对较低 , 一般采用地平线(征程系列)、黑芝麻智能(华山系列)以及老牌玩家Mobileye(EyeQ系列)等。
软件核心:算法成为差异化胜负手
仅有强大的“算力肌肉”还不够,如何高效地运用算力,即软件算法,才是将硬件潜能转化为用户实际体验的关键。随着智能驾驶功能从“有”到“优”的演进,算法的重要性日益凸显:
自研与合作的路径选择:特斯拉、小鹏、华为等头部车企选择全栈自研算法,以掌握核心技术并实现最快的迭代闭环。然而,全栈自研意味着巨大的研发投入、时间成本和技术风险,并非所有车企都能承受。
算法平台公司的机遇:因此,能为车企提供成熟、可定制的智能驾驶解决方案的算法平台公司价值凸显。它们如同汽车界的“安卓系统”,提供包括感知、预测、规控在内的核心算法模块甚至完整系统。例如,Momenta、元戎启行、卓驭科技等公司,正与比亚迪等众多主流车企合作。
解析VCU功能安全软件架构的设计逻辑及核心要点
报名启动 | 江铃集团新能源-长三角汽车供应链技术交流会(含采购需求)