当你的智能手机还在用多摄像头猜测景深,当自动驾驶汽车仍在机械式激光雷达的旋转中权衡性能与寿命,一场颠覆性的成像革命已悄然完成——60万个光子组件被压缩到指甲盖大小的芯片上,让机器首次拥有真正意义上的4D“超视觉”。
在科幻电影中,智能机器能瞬间扫描整个场景,精准识别每个物体的距离和运动轨迹。如今,这一场景正成为现实。Pointcloud公司研究团队在《自然》杂志上发表的一项研究,展示了一款集成超过60万个光子组件的相干4D成像传感器,将三维成像技术推向前所未有的高度
01 从“看得见”到“看得清”:机器视觉的终极挑战精准的三维环境感知,对机器与世界的交互至关重要。无论是自动驾驶汽车规避行人,还是工业机器人抓取零件,都依赖于高精度、高可靠性的成像系统。
过去二十年,科研人员一直试图为“3D世界”创造一种类似CMOS图像传感器的解决方案——既具备可扩展性,又拥有高性能。CMOS图像传感器成就了数码摄影的革命,将成像功能集成到每一部智能手机中。然而,为三维世界寻找这样的“芯片级”解决方案,却远比预期复杂
传统飞行时间(ToF)激光雷达虽已在消费电子中得到应用,但要实现长距离探测,需要微焦耳级的能量每像素,且常常在空间分辨率上做出妥协。机械式激光雷达能实现360度视场角和数百米探测距离,却以体积庞大、功耗高、机械稳定性差为代价
光学相控阵(OPA)技术作为固态光束扫描的替代方案,同样面临挑战。实现宽视场角、高分辨率与低能耗的完美平衡,一直是难以逾越的技术瓶颈
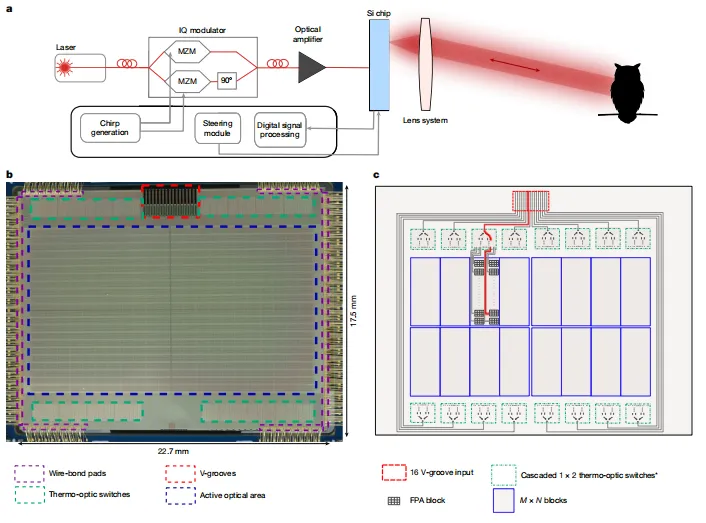
Pointcloud团队此次展示的FMCW LiDAR焦平面阵列(FPA),以352×176像素的二维阵列,集成了超过60万个光子组件,像素数量是此前展示的五倍
这不仅仅是数量的堆砌,更是架构的革新。
每个像素都采用了“单站式”架构——同一个光栅耦合器既负责发射调制光,又负责收集目标的散射光。这种设计不仅避免了像素间的光学串扰,还简化了光学系统,只需一个成像透镜即可工作
更令人惊叹的是其片上集成的电子系统。16个光纤输入通道支持多通道操作,通过两级热光开关网络(第一级1:32,第二级1:16),可将光引导至7744个8像素行。整个开关树的校准由集成的监控光电二极管自动完成。每个像素内的平衡光电二极管对抑制共模噪声,配合集成的跨阻放大器(TIA),实现了高质量的信号读出
图1:4D成像传感器架构与芯片。
a,成像芯片同时充当发射器和接收器的系统架构;b,芯片显微图像,显示有源光学区域;c,成像芯片上的光路选择过程示意图。(图片来源:Nature论文)
FMCW技术的独特优势在于,通过上下啁啾(chirp)的配合,不仅能测量目标距离,还能同步获取径向速度信息,真正实现4D成像
研究团队使用1310nm波长的二极管激光器,通过硅光子学IQ马赫-曾德尔调制器产生线性调频光信号。目标后向散射光与本振光混合产生的拍频频率与距离成正比,而上下啁啾的拍频差异则揭示速度信息。
这种相干检测方式还赋予系统抗干扰能力——只有与本振光相干且以匹配光学模式传播的散射光才能被检测到,大大降低了光学功率需求
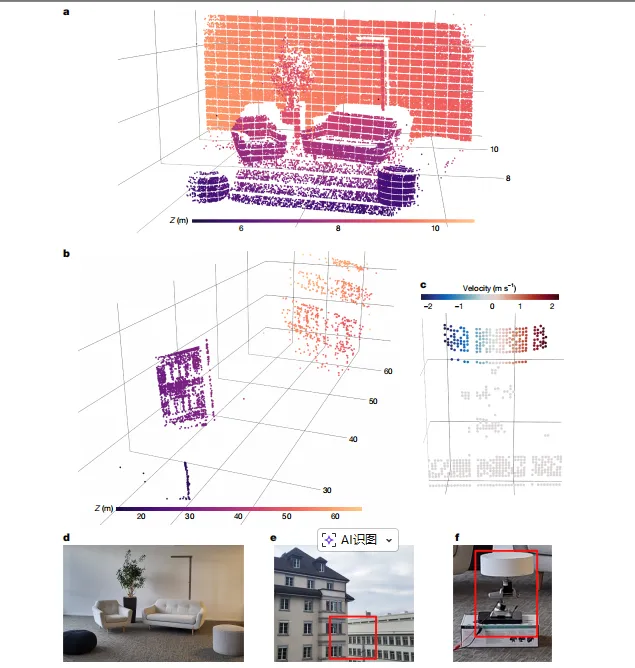
性能测试结果令人印象深刻。在办公室场景中,系统使用35mm焦距透镜,实现了32.6°×19.3°的视场角和0.06°的角分辨率。更令人惊叹的是,对65米外建筑物的成像显示,窗户和外墙细节依然清晰可辨——这仅使用46 nJ每像素的能量,每个像素平均输出功率仅178 μW
图3:示例点云。
a,使用35mm焦距透镜单次采集的办公室场景(6-11米)点云;b,使用50mm焦距透镜对20-65米外的两栋建筑进行四次采集相干平均获得的点云;c,绕垂直轴旋转圆盘的带速度注释点云;d-f,对应场景的照片。(图片来源:Nature论文)*
在对旋转圆盘的4D成像中,系统清晰捕捉到每个点的速度信息,彩色编码直观展示了不同区域的运动状态。即使在5%反射率目标上,距离测量精度仍达到3.9mm,速度精度3.0mm/s,满足大多数应用需求
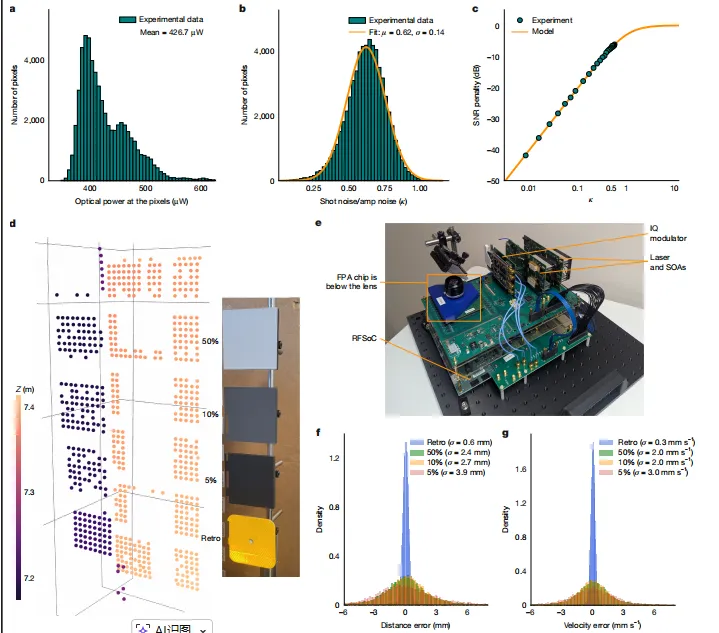
信噪比(SNR)是衡量成像质量的关键指标。研究团队对阵列中每个像素的噪声特性进行了详细分析。测量显示,平均每个像素接收到的光功率为426.7μW,经系统损耗后,平均输出功率为178μW,本振功率为10.1μW
图4:4D成像LiDAR系统的精度与噪声性能。
a,每个像素接收光功率分布;b,测量得到的散粒噪声与放大器噪声比值κ分布;c,SNR损失与散粒噪声-放大器噪声比的关系;f,g,距离(f)和速度(g)测量误差分布。(图片来源:Nature论文)
阵列中κ(散粒噪声与放大器噪声之比)的平均值为0.62,相比纯散粒噪声受限系统,这导致约5.6dB的SNR损失。研究人员指出,通过增加本振光功率或TIA增益,使散粒噪声-放大器噪声比超过2,即可实现散粒噪声极限
这项研究的突破性不仅在于当前性能,更在于其清晰的演进路径。
下一代FPA设计中,通过简单修改像素设计增加本振功率,即可实现约5.6dB的SNR提升。结合新型Si-SiN混合架构,可克服硅中非线性吸收对光学功率的限制,使单个像素传输功率提高十倍。这有望将探测距离扩展至200米以上
开关网络的优化也将消除远场中的间隙,实现均匀的像素排布。就像CMOS相机一样,这一4D成像系统的视场角和探测距离仅由所选光学镜头系统决定,为用户提供了极大的灵活性
在人类视觉之外,机器正在获得属于自己的“凝视”能力。Pointcloud团队的这项研究,就像当年CMOS传感器为数码摄影铺平道路一样,为4D成像的世界打开了全新可能。当60万个光子组件在指甲盖大小的芯片上协同工作,当距离与速度成为每个像素的固有属性,机器与世界的交互方式将再次被重新定义。
从自动驾驶到增强现实,从工业自动化到智能安防,这项技术或许很快就会像今天的摄像头一样,无处不在。而我们,正站在这一变革的门槛上。
参考文献:
Settembrini, F.F., Gungor, A.C., Forrer, A. et al. A large-scale coherent 4D imaging sensor. Nature651, 364–370 (2026). https://doi.org/10.1038/s41586-026-10183-6
本公众号所分享的文献内容均来源于公开出版的学术资源,旨在为读者提供学习与交流的便利,不涉及任何商业用途。内容有些为AI翻译,若有不对欢迎指正,我们尊重每一位作者的知识产权,若无意中侵犯了您的权益,请及时与我们联系,我们将第一时间核实并处理。感谢您的理解与支持!

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
