⚡ 2026 TMLR重磅综述!《A Survey of Reasoning in Autonomous Driving Systems: Open Challenges and Emerging Paradigms》
📖 导读
这篇发表于《Transactions on Machine Learning Research(TMLR)》2026年的权威综述,直击高阶自动驾驶(AD)的核心瓶颈——当前系统已能应对结构化环境,但在长尾场景、复杂社会交互等需要类人判断的场景中持续失效,核心症结在于缺乏鲁棒且泛化的推理能力。清华大学、华东师范大学、香港大学联合团队系统性梳理了大语言模型(LLMs)与多模态大语言模型(MLLMs)作为认知引擎融入AD系统的研究进展,创新性提出“驾驶认知层级”框架,将复杂驾驶任务按认知与交互复杂度拆解,明确七大核心推理挑战,并从“系统架构”与“评估方法”双视角全面分析现有技术。其核心价值在于:建立了“推理-驾驶任务”的映射关系,揭示LLM-based推理从“模块组件”升级为“系统认知核心”的必然趋势;指出“推理延迟与实时控制”的核心矛盾,为下一代AD系统的推理架构设计提供明确方向。该综述填补了AD推理领域的系统性梳理空白,推动自动驾驶从“感知驱动”向“认知驱动”跨越。
研究团队通过跨学科视角(机器学习、认知科学、自动驾驶工程),整合海量研究成果,既剖析现有技术局限,又提出可落地的未来方向,为AD推理领域的科研人员与工程师提供了权威的参考蓝图。
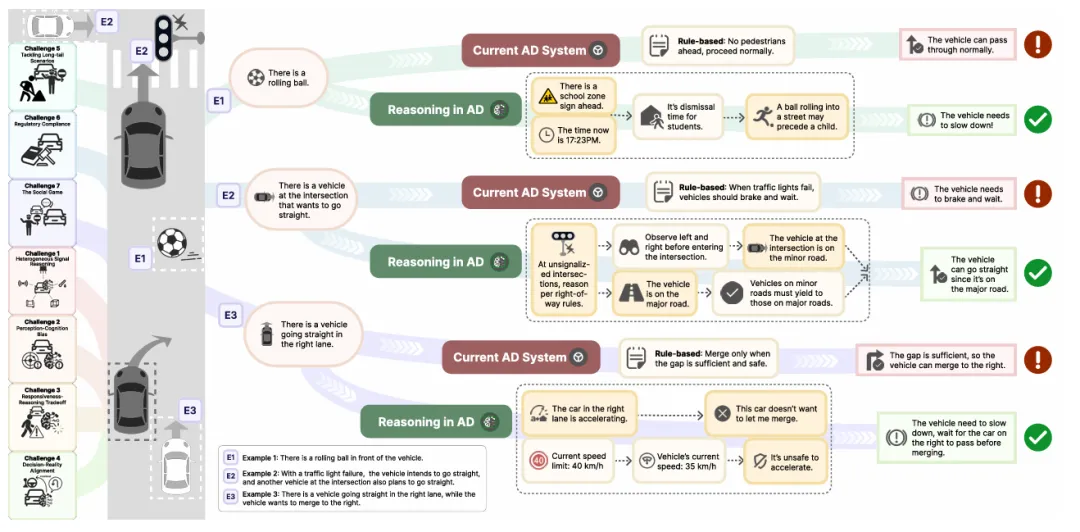
📷 图1 | 动机:为什么显式推理在自动驾驶中至关重要。左栏总结了我们分类法中的七个反复出现的推理挑战。右栏展示了三个说明性场景(E1-E3),对比了一个具有代表性的、由基于规则的启发式方法驱动的当前自动驾驶系统与一种通过显式推理(虚线框)整合上下文信号、交通规则和多智能体交互线索的自动驾驶推理方法。这种对比凸显了脆弱的策略如何会产生不安全或过于保守的行为(红色),而结构化推理则支持符合上下文的决策(绿色)。
论文核心信息
- 论文题目:A Survey of Reasoning in Autonomous Driving Systems: Open Challenges and Emerging Paradigms(《自动驾驶系统中的推理研究综述:开放挑战与新兴范式》)
- 作者:Kejin Yu、Yuhan Sun、Taiqiang Wu等(清华大学、华东师范大学、香港大学联合团队)
- 发表期刊:Transactions on Machine Learning Research(TMLR)
- 发表时间:2026年3月(在线发表,arXiv:2603.11093v1)
- 文献覆盖:系统梳理2020-2026年近500篇相关研究,涵盖LLM/MLLM推理、AD系统架构、评估基准等三大方向;
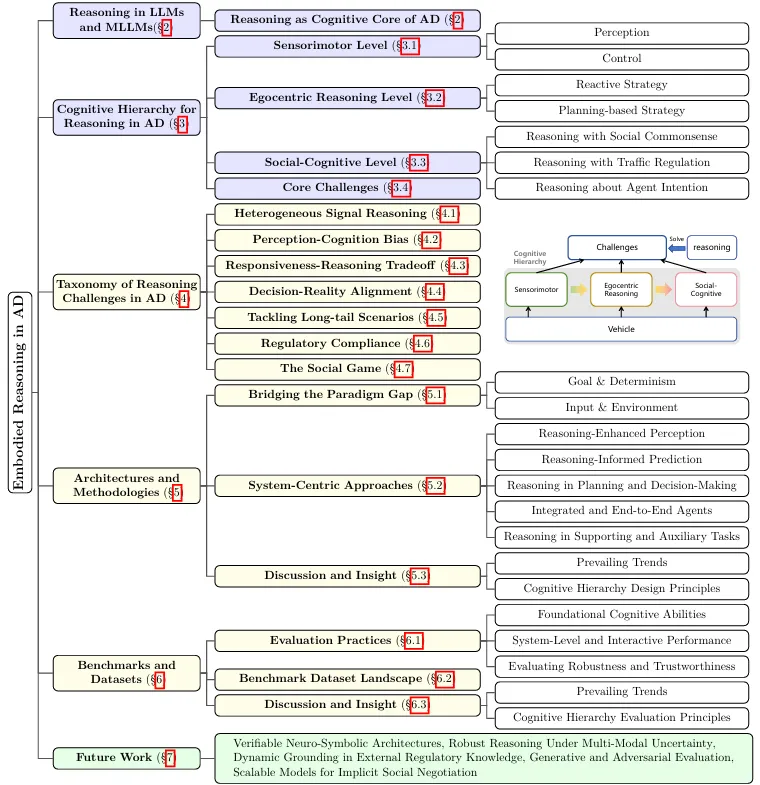
- 框架维度:构建“3层级认知架构+7大核心挑战+2视角研究现状”的完整体系;
- 趋势提炼:明确“玻璃盒”可解释智能体、神经符号架构、社会博弈推理等三大前沿趋势;
- 核心矛盾:量化LLM推理延迟(百毫秒-秒级)与AD控制需求(毫秒级)的量级差距;
- AD的下一代瓶颈已从感知/控制转向推理,尤其是长尾场景的情境理解与社会交互判断;
- LLM/MLLM的涌现推理能力与常识知识库,为解决AD推理缺陷提供了 transformative 方案;
- 推理应从“模块化组件”升级为“系统认知核心”,而非简单叠加在传统感知-预测-规划流水线中;
- 现有研究缺乏统一的推理评估框架,且未解决“符号-物理映射”“实时性”“社会合规性”三大关键问题;
- 提出驾驶认知层级框架:按认知复杂度拆解为传感运动层、自我中心推理层、社会认知层,明确各层级推理需求;
- 系统化七大核心挑战:基于认知层级,提炼异构信号推理、感知-认知偏差等关键问题,构建结构化问题空间;
- 双视角综述体系:从“系统架构”(智能体设计)与“评估方法”(验证方案)双维度分析研究现状,覆盖全链路;
- 聚焦核心矛盾:明确LLM推理延迟与AD安全控制需求的本质冲突,为未来研究指明优先级;
- 核心主题:自动驾驶推理、大语言模型、多模态大语言模型、认知架构、长尾场景、社会交互、实时推理;
- 核心受众:自动驾驶算法工程师、LLM多模态研究者、认知科学与AI交叉领域科研人员、智能驾驶企业研发团队、高校相关领域师生。
❓ 自动驾驶推理的四大“核心痛点”
- 推理定位模糊:传统AD系统将推理视为模块化组件,叠加在感知-预测-规划流水线中,导致信息丢失、模块协同不畅,无法形成全局认知;
- 场景适配不足:在长尾场景(如临时交通管制、感知系统退化)与复杂社会交互(如行人意图预判、车辆礼让博弈)中,缺乏类人常识推理能力;
- 技术瓶颈突出:LLM-based推理存在延迟与实时控制需求的矛盾,且面临符号-物理映射、社会合规性等未解决难题;
- 评估体系缺失:缺乏统一的推理能力评估框架,现有基准多聚焦感知/规划性能,忽视推理的鲁棒性、可解释性与社会兼容性。
🔧 核心真相:论文多维度拆解“AD推理的突破机制”
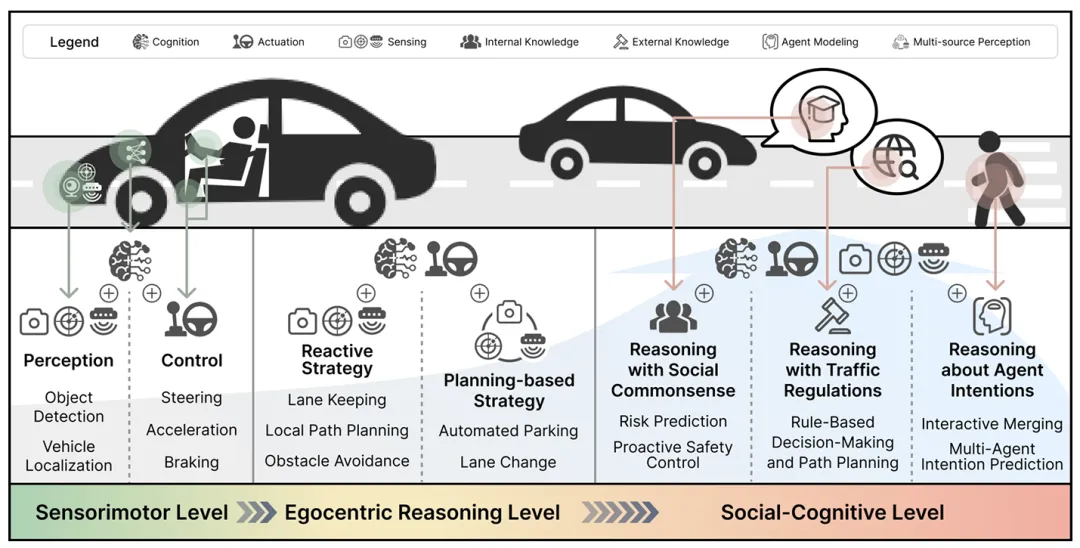
图3:所提出的自动驾驶推理认知层次结构。该框架将整体的“驾驶”任务分解为三个不同的层次,其认知和交互复杂性逐渐增加:(1)感觉运动层,(2)自我中心推理层,(3)社会认知层。
首次提出按“认知与交互复杂度”划分的驾驶认知层级,明确各层级的推理需求与核心任务:
| | | | |
|---|
| 传感运动层(Sensorimotor Level) | | | | |
| 自我中心推理层(Egocentric Reasoning Level) | | | | |
| 社会认知层(Social-Cognitive Level) | | | | |
(1)层级核心特征
- 层级递进:低层级为高层级提供基础(如传感运动层的精确控制支撑社会认知层的复杂交互);
- 推理升级:从低层级的“反应式推理”(如环境反馈→控制调整),升级为高层级的“ deliberative 推理”(如社会规范→意图预判→规划决策);
- 需求差异:低层级侧重实时性与精确性,高层级侧重常识性与鲁棒性。
2. 核心挑战:七大推理关键问题(真相2)
基于驾驶认知层级,提炼出贯穿各层级的七大核心挑战,构建结构化问题空间:
| | | |
|---|
| 异构信号推理(Heterogeneous Signal Reasoning) | 融合多模态(图像/LiDAR/文本规则)、多源异构信号,提取一致推理依据 | | 融合LiDAR距离数据与交通标志文本规则,判断通行权限 |
| 感知-认知偏差(Perception-Cognition Bias) | | | |
| 响应-推理权衡(Responsiveness-Reasoning Tradeoff) | | | LLM深度推理需百毫秒,而紧急避障仅允许毫秒级响应 |
| 决策-现实对齐(Decision-Reality Alignment) | | | 规划的“安全距离”符号化指标,无法适配不同路面摩擦系数 |
| 长尾场景应对(Tackling Long-tail Scenarios) | | | |
| 合规性推理(Regulatory Compliance) | | | 在规则冲突场景(如礼让行人与不违反限速)中做出合规决策 |
| | | |
3. 双视角综述:研究现状分析(真相3)
(1)视角1:系统架构(智能体设计)
按“推理融入方式”梳理现有AD推理系统,明确各方案的优势与局限:
| | | | |
|---|
| 推理增强感知(Reasoning-Enhanced Perception) | | | | |
| 推理引导预测(Reasoning-Informed Prediction) | | | | |
| 推理驱动规划决策(Reasoning in Planning/Decision-Making) | | | | |
| 端到端集成智能体(Integrated End-to-End Agents) | | | | |
(2)视角2:评估方法(验证方案)
现有评估体系缺乏统一标准,按“评估维度”梳理现状:
| | | |
|---|
| 传统AD基准(如nuScenes、Waymo Open Dataset) | | |
| | | |
| | | |
| | | |
4. 核心趋势与未来方向(真相4)
(1)三大研究趋势
- 趋势1:从“黑盒”到“玻璃盒”智能体:强调推理过程的可解释性与可验证性,避免端到端模型的决策黑盒问题;
- 趋势2:神经符号架构融合:结合神经网络的感知能力与符号系统的推理严谨性,解决“符号-物理映射”难题;
- 趋势3:社会博弈推理深化:从简单意图预测升级为隐性社会交互博弈,提升复杂交通场景的决策合理性。
(2)五大未来研究方向
- 可验证神经符号架构:构建兼具LLM常识推理能力与符号系统严谨性的架构,实现推理过程可验证;
- 不确定性下的鲁棒推理:开发多模态不确定性建模方法,应对感知噪声、场景模糊等复杂情况;
- 外部规则知识动态接地:建立交通规则、法律规范的动态更新与物理世界映射机制,确保推理合规性;
- 生成式与对抗性评估:设计生成式长尾场景测试集与对抗性推理任务,全面验证推理鲁棒性;
- 隐性社会协商的可扩展模型:开发能理解并参与交通隐性社会博弈的模型,适配复杂社会交互场景。
关键内容
1. LLM/MLLM在AD推理中的核心优势与局限
2. 不同认知层级的推理技术路径对比
💬 Q&A
Q1:为何说推理应从“模块化组件”升级为“系统认知核心”? A:传统AD系统将推理叠加在感知-预测-规划流水线中,存在三大问题:① 模块间信息丢失,推理无法利用全局上下文;② 推理与其他模块协同不畅,难以动态调整各环节策略;③ 无法处理跨模块的规则冲突(如感知噪声导致的规划矛盾)。将推理升级为认知核心后,可实现:① 全局场景理解,整合多模态异构信号,形成统一认知;② 模块协同调度,动态优化感知-预测-规划的参数与逻辑;③ 规则冲突消解,基于常识推理平衡安全、效率与社会合规性。这种转型不是替换现有模块,而是让推理成为协调各模块的“大脑”,实现从“线性流水线”到“智能体”的跨越。
Q2:LLM推理延迟与AD实时控制需求的矛盾如何缓解? A:核心是“分层推理+硬件加速”的协同策略:① 分层推理,低层级任务(如车道保持)采用传统快速推理模块,高层级任务(如社会交互)采用LLM-based推理,仅在必要时启动深度推理;② 推理优化,通过模型压缩(剪枝、量化)、提示词工程(少样本推理、思维链压缩)减少LLM推理耗时;③ 硬件加速,采用FPGA/ASIC专用芯片加速LLM推理,将延迟降至百毫秒以内;④ 预测性推理,提前预判可能的复杂场景,预加载推理结果,减少实时决策延迟。但需明确,该矛盾无法完全消除,需在推理深度与安全风险间动态权衡。
Q3:驾驶认知层级框架对AD系统设计有何具体指导意义? A:该框架为系统设计提供了“按需推理”的明确依据:① 针对低层级(传感运动层),优先保证实时性与精确性,推理以简单规则与反馈控制为主,避免复杂计算;② 针对中层级(自我中心推理层),重点优化智能体意图预测与短期规划推理,平衡实时性与合理性;③ 针对高层级(社会认知层),聚焦常识推理与社会博弈,可适当牺牲部分实时性换取决策安全性与合规性。此外,该框架还能指导模块划分与接口设计,确保各层级推理需求与技术路径匹配,避免“一刀切”的推理方案。
Q4:现有AD推理评估体系的核心不足是什么?如何改进? A:核心不足在于“缺乏针对性、统一性与全面性”:① 缺乏推理专属指标,现有指标多聚焦感知/规划性能,忽视推理的鲁棒性、可解释性;② 无统一基准,研究间难以横向对比;③ 场景覆盖不全,未充分包含长尾场景与社会交互场景。改进方向:① 设计推理专属评估指标,如常识一致性、规则冲突消解率、社会规范符合度;② 构建统一基准数据集,涵盖不同认知层级的推理任务,含长尾场景与社会交互场景;③ 开发多维度评估方法,结合定量指标(如推理准确率)与定性分析(如决策合理性、可解释性),全面验证推理能力。
Q5:神经符号架构为何能成为AD推理的重要方向? A:神经符号架构结合了神经网络与符号系统的优势,完美适配AD推理的核心需求:① 神经网络擅长处理感知噪声、多模态融合等低层级任务,为推理提供精准的物理世界输入;② 符号系统擅长逻辑推理、规则编码与可解释性,解决LLM的“符号-物理映射”与“可验证性”难题;③ 两者融合可实现“感知-推理-控制”的无缝衔接,既保留LLM的常识推理能力,又确保决策的严谨性与安全性。例如,在临时交通管制场景中,神经网络处理感知信号(识别临时标志),符号系统编码交通规则与推理逻辑,协同做出合规决策,同时保证推理过程可追溯、可验证。
🎯 点评
- 核心贡献:首次建立AD推理的系统性综述框架,提出驾驶认知层级与七大核心挑战,填补领域空白;从双视角全面分析研究现状,明确“推理升级为认知核心”的趋势;聚焦LLM推理延迟与实时控制的核心矛盾,为未来研究指明优先级;推动AD从“感知驱动”向“认知驱动”转型,为高阶自动驾驶的落地提供理论支撑。
- 亮点:① 理论框架创新,驾驶认知层级与七大挑战构建了结构化问题空间,指导意义强;② 覆盖全面,整合LLM/MLLM、认知科学、AD工程等多领域研究,跨学科视角突出;③ 问题导向明确,聚焦未解决的核心矛盾与技术瓶颈,避免泛泛而谈;④ 实用价值高,为AD系统设计、评估方案制定提供具体指导,契合工业化需求。
- 不足:① 未深入探讨不同车型(如乘用车、商用车)的推理需求差异;② 对边缘计算、车路协同等部署场景下的推理优化讨论不足;③ 缺乏对推理技术落地成本与工程可行性的分析;④ 未涉及伦理决策等特殊场景的推理问题(如两难困境中的选择)。
🌟 总结金句
高阶自动驾驶的突破,不在于感知精度的边际提升,而在于推理能力的质的飞跃——将LLM/MLLM的常识推理能力升级为系统认知核心,以驾驶认知层级为框架,破解实时性、符号-物理映射、社会合规性三大难题,才能让自动驾驶系统真正理解复杂世界,实现从“能开”到“会开”再到“安全合规地开”的跨越。
📌 互动引导
你认为AD推理最需要优先突破的核心技术瓶颈是什么?
● ✅ 可验证神经符号架构(解决符号-物理映射与可验证性);
● ✅ 实时推理优化(平衡LLM推理深度与控制延迟);
● ✅ 社会博弈推理模型(适配复杂交通交互场景);
● ✅ 统一推理评估框架(建立标准化验证体系);
● ✅ 不确定性鲁棒推理(应对感知噪声与场景模糊);
欢迎在评论区分享观点,一起探讨AD推理的技术落地路径 👇
🧩 思考/研究 Idea 彩蛋(可操作方向)
- 分层实时推理架构:设计“低层级快速规则推理+高层级LLM深度推理”的混合架构,平衡实时性与合理性,适合投稿《IEEE Transactions on Intelligent Transportation Systems》;
- 神经符号规划器:开发融合MLLM常识与符号逻辑的规划系统,实现推理过程可验证,适合投稿《NeurIPS》;
- 社会博弈推理数据集:构建含隐性交通交互场景的数据集,量化社会规范符合度,适合投稿《CVPR》;
- 推理延迟优化:基于模型量化与硬件加速,将LLM推理延迟降至50ms以内,适合投稿《IEEE Micro》;
- 不确定性推理模型:结合贝叶斯学习与MLLM,建模多模态不确定性,提升长尾场景鲁棒性,适合投稿《ICML》;
- 人机协同推理系统:设计LLM辅助的人机协同决策框架,在复杂场景中引入人类干预,适合投稿《IEEE Transactions on Vehicular Technology》;
- 推理可解释性工具:开发AD推理链可视化平台,追溯决策依据,提升安全合规性,适合投稿《IEEE Transactions on Visualization and Computer Graphics》。