Humans, machines, and double standards? The moral evaluation of the actions of autonomous vehicles, anthropomorphized autonomous vehicles, and human drivers in road-accident dilemmas.
人类、机器和双重标准?自动驾驶车辆、拟人化自动驾驶车辆以及人类驾驶员在道路事故困境中的行为的道德评价
作者:Maike M. Mayer, Axel Buchner,Raoul Bell
1.引言
近年来,认知心理学领域对人类与无生命物体的信息加工差异越来越感兴趣。而道德判断作为一个典型的认知领域,成为了探讨这种差异的重要场景。直觉上,人们可能认为人类应当比机器承担更高的道德责任,因此其行为应受到更严厉的评价。然而,自动驾驶汽车的引入引发了广泛的社会关注。尽管自动驾驶技术有望减少交通事故、提高出行效率,但无法完全避免事故,尤其是涉及行人或乘客死亡的致命事故,往往会引发媒体和公众的强烈反应。在这种背景下,研究公众如何评价自动驾驶汽车与人类驾驶员在事故中的行为,具有重要的理论和现实意义。因此本研究旨在探讨人们对人类驾驶员和自动驾驶汽车在事故中的行为是否存在不同的道德评价、这种差异是否受到功利主义原则和自我牺牲的影响以及拟人化是否能够缩小这种评价差距。本研究对理解人类如何对机器进行道德判断以及对自动驾驶技术的推广和社会接受具有重要意义。
2.研究内容
本研究旨在系统探讨以下几个核心问题:首先,验证是否存在普遍的道德评价偏差,即人们是否总是更宽容地评价人类驾驶员的行为,而对自动驾驶汽车的行为持更批判的态度。其次,检验功利主义原则是否影响评价差异,即当行为符合牺牲少数救多数的功利主义标准时,自动驾驶汽车是否会比人类驾驶员获得更高的道德评价。第三,探讨自我牺牲的作用,即当行为涉及驾驶员自我牺牲时,人类驾驶员是否会比自动驾驶汽车获得更高的道德评价。第四,检验拟人化的干预效果,即通过赋予自动驾驶汽车名字和人格化描述,是否能够缩小其与人类驾驶员之间的道德评价差距。为此,研究者设计了两个实验,实验1比较了人类驾驶员与非拟人化自动驾驶汽车在不同事故场景中的道德评价;实验2则加入了拟人化自动驾驶汽车这一条件,进一步探讨拟人化的作用。
3.研究方法
3.1参与者
实验1通过网络广告形式共招募360名参与者,其中包括266名女性、94名男性,年龄范围从18岁到80岁(平均年龄为27岁),参与者被随机分配到人类驾驶员组或非拟人化自动驾驶汽车组,其中人类驾驶员组187人,自动驾驶汽车组173人。
实验2的样本规模扩大至755名参与者,包括317名女性、437名男性和1名多样性性别,年龄范围从18岁到87岁(平均年龄为46岁)。参与者被随机分配到人类驾驶员组、拟人化自动驾驶汽车组或非拟人化自动驾驶汽车组,其中人类驾驶员组248人、拟人化自动驾驶汽车组250人以及非拟人化自动驾驶汽车组257人。
3.2实验设计
两个实验均采用混合实验设计。在实验1中,自变量包括一个被试间变量,即代理类型,分为人类驾驶员和自动驾驶汽车两个水平,以及两个被试内变量,即行为类型,分为牺牲车内人员和牺牲行人两个水平,以及行人数量,分为1人、2人和5人三个水平。因变量为参与者对代理行为的道德评价,采用6点李克特量表进行测量,从1代表非常应受谴责到6代表非常合理。
实验2在实验1的基础上增加了一个被试间变量水平,即拟人化自动驾驶汽车,从而形成三个实验条件。在拟人化操作中,研究者将自动驾驶汽车命名为Alina,并在整个实验材料中使用人格化语言进行描述,例如称其为智能驾驶系统,以此赋予其人类特征。
实验材料方面,研究者设计了抽象的道路事故场景图示,从鸟瞰视角呈现车辆、障碍物和行人的位置关系,并用红色骷髅标志标示死亡后果,同时配以文字描述说明具体情况。如图1展示了两种示例场景,其中图1A描绘了牺牲车内人员以拯救五名行人的情况,图1B则描绘了牺牲五名行人以拯救车内人员的情况,这两种图示在实验中交替呈现,以确保参与者能够清晰理解每种行为的后果。
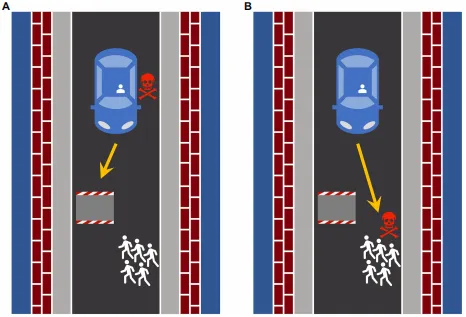
图1事故场景图
3.3实验流程
两个实验均通过SoSci Survey平台在线进行,整个参与过程约需10分钟。参与者首先阅读指导语,根据所分配的条件,指导语分别介绍人类驾驶员或自动驾驶汽车需要处理各种交通状况,包括不可避免的事故。在自动驾驶汽车条件下,指导语特别强调了这些车辆是完全自主驾驶、无需人类干预的5级自动驾驶汽车。随后,参与者会看到一个示例场景,明确两种可能的行动选项,即要么撞向障碍物导致车内人员死亡,要么撞向行人导致行人死亡。
在正式实验阶段,参与者依次观看24个随机呈现的事故场景,这些场景由2种行为类型、3种行人数量以及位置平衡组合而成。每个场景下方都会重复呈现具体的行为描述和后果,并询问参与者从道德角度如何评价这一行为,参与者通过点击6点量表完成评价。在实验结束后,参与者需要完成一个注意力检测题,要求指出之前场景中涉及的代理类型,以确保他们认真参与了实验。两个实验均遵循赫尔辛基宣言,在实验开始前获得每位参与者的知情同意。
4.研究结果
4.1实验1结果
实验1的结果如图2所示,图2清晰地展示了不同条件下参与者对行为的道德评价均值。从图2可以看出人类驾驶员的行为在所有条件下都获得了比自动驾驶汽车更高的道德评价,具体而言统计检验结果显示人类驾驶员的行为平均评分为3.64,而自动驾驶汽车的行为平均评分为3.18,这一差异具有统计学显著性,表明人们对人类驾驶员的行为更为宽容。
在行为类型方面,牺牲车内人员的行为平均评分为4.23,高于牺牲行人的行为的2.61分,说明参与者普遍更认可牺牲自己以拯救他人的行为。值得注意的是人类驾驶员与自动驾驶汽车在行为评价上的差异在牺牲车内人员的情况下更为明显,人类驾驶员的评分为4.54,而自动驾驶汽车仅为3.89。
在行人数量方面,随着行人数量从1人增加到5人,牺牲车内人员的行为评价逐渐上升,而牺牲行人的行为评价则逐渐下降,这一趋势在人类驾驶员和自动驾驶汽车条件下均存在。图2中的曲线清晰地反映了这一规律,在牺牲车内人员的条件下两条曲线均呈上升趋势,在牺牲行人的条件下两条曲线均呈下降趋势。此外实验1还发现了一个显著的三阶交互作用,表明人类驾驶员的自我牺牲行为受行人数量影响较小,而自动驾驶汽车的行为更受功利主义原则影响,然而这一交互作用的效应量较小。
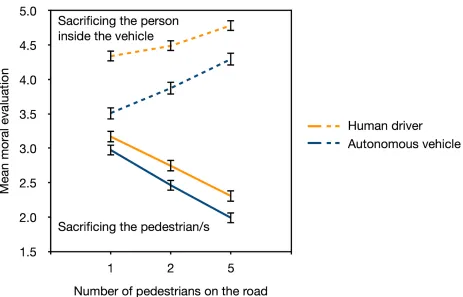
图 2行为的平均道德评价(实验1)
4.2实验2结果
实验2的结果如图3所示,图3在实验1的基础上增加了拟人化自动驾驶汽车的条件。从图3可以直观地看到拟人化自动驾驶汽车的评价在所有行为类型和行人数量条件下均高于非拟人化自动驾驶汽车,但仍低于人类驾驶员。统计检验结果显示人类驾驶员的行为平均评分为3.39,拟人化自动驾驶汽车为3.11,非拟人化自动驾驶汽车为2.86,三者之间的差异具有统计学显著性。进一步的两两比较表明拟人化自动驾驶汽车的评价显著高于非拟人化自动驾驶汽车,这验证了拟人化的积极作用。
在行为类型方面实验2再次验证了牺牲车内人员的行为3.72分高于牺牲行人的行为2.51分。在行人数量方面实验2的结果与实验1一致,随着行人数量增加,牺牲车内人员的行为评价上升,牺牲行人的行为评价下降。图3中的曲线同样清晰地反映了这一趋势。然而与实验1不同的是实验2中并未发现行为与条件之间的显著交互作用,也未发现三阶交互作用,这表明在更大的样本量和更严格的控制条件下,实验1中观察到的细微交互效应并未得到稳健的复制。
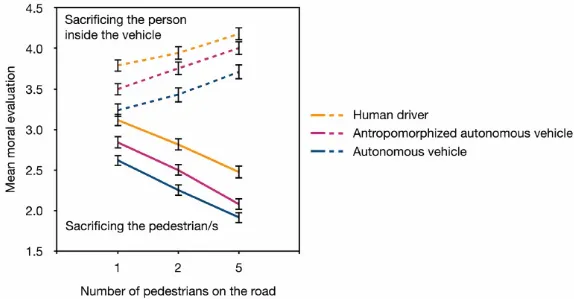
图3行为的平均道德评价(实验2)
5.结论
本研究表明在不可避免的交通事故中,人们对人类驾驶员的行为评价显著高于自动驾驶汽车,这一差异并非由功利主义原则或自我牺牲的特殊性所驱动,而是一种普遍的道德评价偏差。即使在行为结果完全相同的情况下,自动驾驶汽车也更容易受到道德谴责。实验2的结果表明,通过赋予自动驾驶汽车名字和人格化特征,可以在一定程度上缩小其与人类驾驶员之间的道德评价差距,这说明拟人化可能是一种有效的干预手段,有助于提升公众对自动驾驶技术的接受度。另外本研究丰富了关于人类与机器在道德判断中差异的认知心理学文献,它支持了道德评价偏差假说,即人们对机器在生命攸关决策中的行为持更批判的态度;同时,研究也质疑了机器更应遵循功利主义的观点,因为在控制了行为后果后,并未发现一致的功利主义偏好差异。
6.参考文献
Mayer, M. M., Buchner, A., & Bell, R. (2023). Humans, machines, and double standards? The moral evaluation of the actions of autonomous vehicles, anthropomorphized autonomous vehicles, and human drivers in road-accident dilemmas. *Frontiers in Psychology*, *13*, 1052729.
7.点评
本研究通过两项在线实验与重复测量方差分析,揭示了观察者对同一事故场景中人类驾驶员与自动驾驶汽车行为的道德评价差异及其边界条件。研究发现了一个稳定的认知不对称现象,即在完全相同的道路事故困境中,人们对自动驾驶汽车的行为始终表现出显著更低的道德可接受性、更严厉的道德谴责;而当自动驾驶汽车被拟人化后,这一评价差距显著缩小,但未能完全消除。然而,研究存在一定局限。首先,实验材料为抽象图示与文字描述,与真实事故的高情感卷入度存在差距;其次,样本全部来自德国,其文化背景与对自动驾驶技术的态度可能影响道德直觉,导致结论的跨文化普适性受限。
注:由于水平有限,翻译中难免存在不准确或错误之处,请以原文为准,并欢迎指正。
知识搬运工(翻译者)丨 冯桂洲
审核丨 张思晴
出品丨 合肥工业大学 运输与安全研究所
版权声明
本文为《合肥工业大学 运输与安全研究所》独家撰写,如需转载,
请注明出处,谢谢!


