User preferences regarding autonomous vehicles
用户对自动驾驶汽车的偏好
作者:Chana J. Haboucha, Robert Ishaq, Yoram Shiftan
1.引言
技术进步推动交通变革,自动驾驶车辆(AV)能解决交通安全、拥堵等问题,提升低机动性人群出行能力,还催生了共享自动驾驶车辆(SAV)模式,却也可能带来道路容量需求增加等负面影响。目前公众对AV接受度偏低,现有研究多聚焦技术层面,缺乏传统车辆、私人AV(PAV)、SAV的对比选择模型,也未明确地区偏好差异。本研究旨在明确AV使用群体,探究公众接受阻碍及解决办法,构建相关采纳偏好模型,分析各类影响因素并对比以色列与北美人群的AV偏好差异。
2.研究内容
本研究面向以色列和北美地区线上发放含通勤习惯、社会经济特征、态度量表、陈述性偏好选择实验的问卷,收集721份有效数据;通过因子分析对30项态度陈述降维,提取影响自动驾驶车辆(AV)选择的核心潜变量并明确其与观测变量的载荷关系;构建含面板效应的嵌套LK随机效用模型,纳入多类特征量化其对传统车辆、私人及共享AV选择的影响并确定最优参数;对比以、美人群在成本关注等维度的AV偏好差异,识别区域特征;经停车成本等弹性分析验证政策影响,提出SAV推广建议,并分析研究局限性与未来研究方向。
3.研究方法
3.1参与者
本研究选取以色列和北美(美国、加拿大)有通勤驾车需求(工作/上学)的人群为调查对象,于2014年9—11月通过Qualtrics平台线上发放问卷,通过筛选问题剔除无通勤驾车需求的受访者,同时移除未完整填写问卷的样本,最终获得721名有效受访者。
其中131名受访者通过亚马逊 Mechanical Turk 系统招募,每位受访者完成最多6组选择实验,共产生4260个有效观测值,其中美国和加拿大1920个、以色列2109个、其他地区23个。受访者的社会经济特征分布较均衡,仅年轻和年长人群占比低于总体人口,如图1所示。
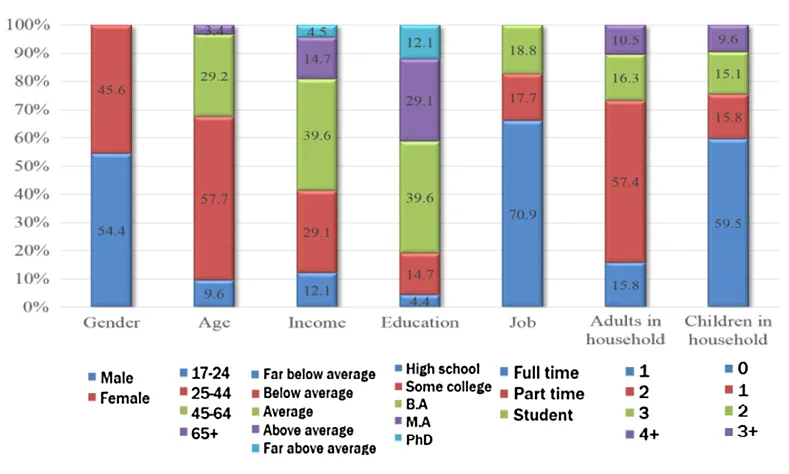
图1 社会经济人口统计分布
3.2调查工具
采用线上陈述性偏好(SP)调查问卷,问卷包含四部分核心内容,各部分均为后续模型构建和数据分析提供关键变量:
通勤驾驶习惯调查:收集受访者通勤距离、通勤时间、停车成本、下次购车预算等信息,不仅用于分析通勤特征对AV选择的影响,还作为陈述性偏好选择实验的参考值,实验中向参与者展示的核心变量如表1所示。
社会经济特征调查:涵盖性别、年龄、职业、家庭状况、教育水平、收入水平等,该类特征是影响车辆选择决策的重要客观因素,其具体影响趋势如图2所示。
态度量表调查:设计30项态度陈述,采用5点李克特量表让受访者标注同意程度,测量受访者对环境、公共交通、驾驶、AV、新技术等方面的态度,为后续因子分析提取潜变量提供数据。
陈述性偏好选择实验:为受访者随机分配6组不同实验场景,每组均提供传统车辆、PAV、SAV 三种选择,基于受访者自身通勤数据,通过百分比调整生成不同的购车成本、出行成本、停车成本等属性水平,实验的具体属性水平设计如表2所示。
表1 向参与者展示的SP选择表中的核心变量

表2 SP实验设计的属性水平设置
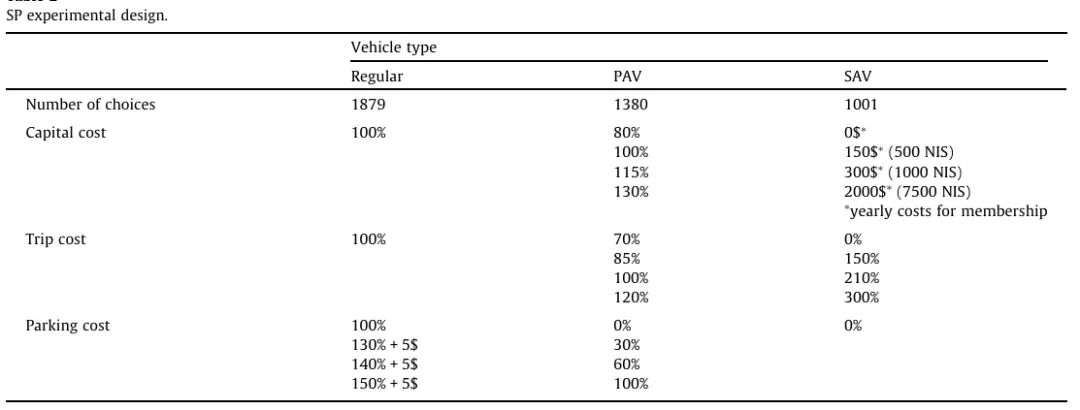
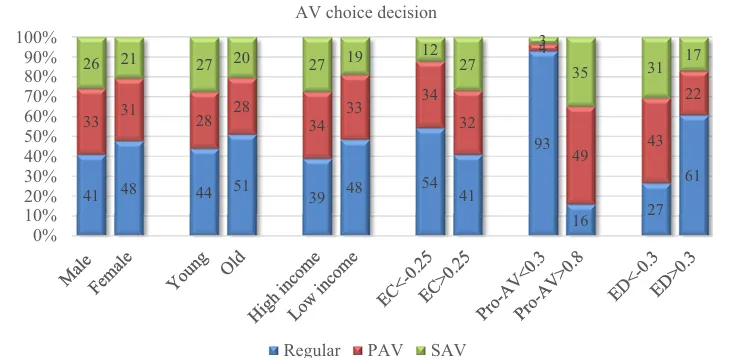
图2 社会经济与态度特征对选择决策的影响
3.3实验设计
采用SAS软件生成部分正交平衡设计,共设置16种实验场景,每位受访者随机分配6组,确保实验变量的独立性和代表性。实验中调整的核心属性为购车成本、年度会员费、单次通勤出行成本、停车成本,其中PAV的各项属性均以传统车辆为基准进行百分比调整,SAV采用 “年度会员费 + 按次计费” 的混合收费模式,且无需支付停车成本,属性水平的调整充分考虑不同国家受访者的实际情况,采用相对值(百分比)而非绝对值。
3.4数据分析方法
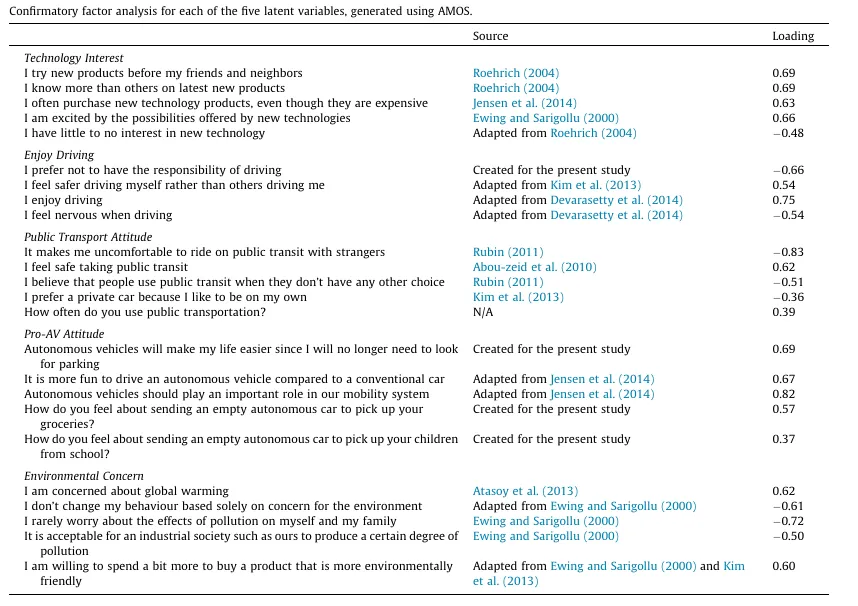
因子分析:使用SPSS和AMOS软件对30项态度陈述进行因子分析,先通过主成分分析法确定潜变量数量,再经VARIMAX旋转获得可解释的正交因子,最后通过验证性因子分析验证潜变量与观测变量的关系,验证结果如表4所示。
离散选择模型:构建包含面板效应的嵌套LK随机效用模型,将社会经济特征、通勤特征、潜变量纳入效用函数,使用BIOGEME软件通过最大似然估计法估计模型参数,充分考虑个体重复选择的面板效应和备选方案间的未观测共同特征,模型最终估计结果如表5所示。
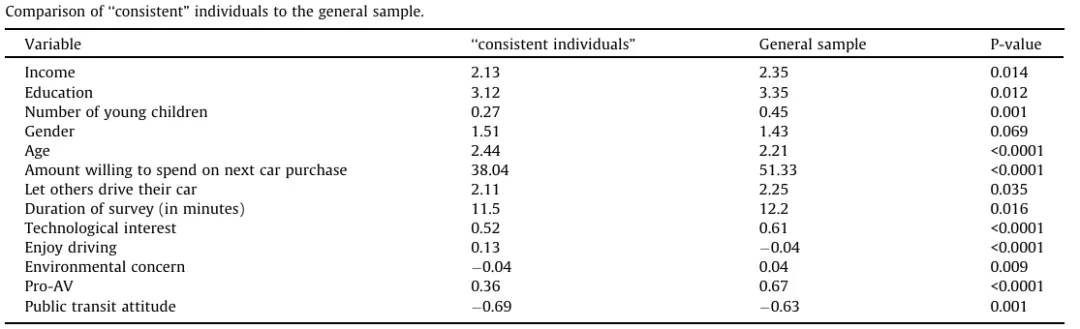
描述性统计与对比分析:对受访者的通勤特征、车辆选择偏好进行描述性统计,对比以色列与北美人群的选择差异,同时将始终选择传统车辆的 “一致性” 人群与总体样本进行特征对比,分析两类人群的显著差异,对比结果如表3所示。
4.研究结果
4.1样本基本特征
受访者平均通勤距离20km、通勤时间30分钟,82.4%的受访者独自驾车通勤,74%的受访者在通勤目的地无需支付停车费,平均停车成本2.26美元,找车位平均耗时3.6分钟、从车位到目的地平均步行4.1分钟。北美受访者下次购车平均预算23700美元,以色列受访者为76100新谢克尔(折合 20110 美元)。
公共交通使用方面,44%的受访者从不使用公共交通,33.5%的受访者仅每年使用几次,公共交通使用频率与SAV选择呈正相关。对AV的主观态度方面,53%的受访者对空驶AV取杂货表示接受,仅13%接受空驶AV接孩子放学;66% 的受访者认为拥有AV的人工控制权会更安心,仅7.5%的受访者偏好无控制权的纯自动驾驶模式。
4.2车辆选择整体偏好
整体选择决策中,44%的受访者选择传统车辆,32%选择 PAV,24%选择 SAV,可见当前公众对AV的采纳存在显著犹豫。区域差异特征显著,北美人更倾向于选择传统车辆(54%),而以色列人的选择分布更均衡(PAV 36%、传统车辆 35%、SAV 29%)。
721名受访者中,36%(262人)在6组实验中一致性选择同一车型,其中 166人始终选择传统车辆、50人始终选择 PAV、48人始终选择SAV;仅16.5% 的北美受访者和23.6%的以色列受访者至少各选择过一次三种车型,以色列人更愿意将多种车型纳入选择集,区域选择集的差异特征如图3所示。
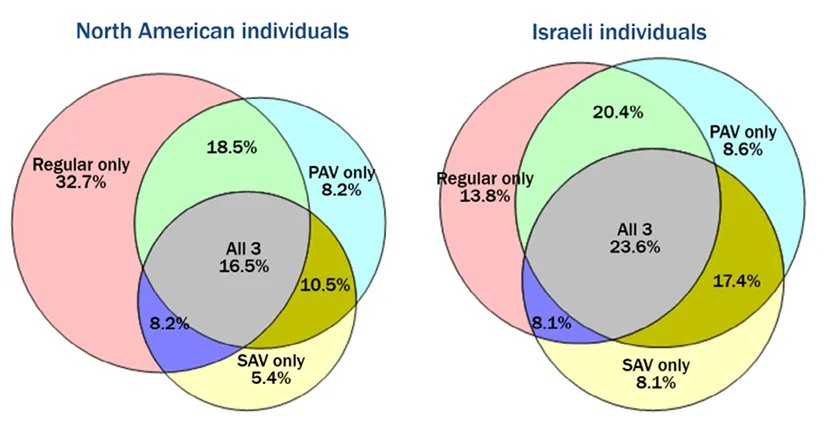
图3 分区域的个体选择集分析
始终选择传统车辆的 “一致性” 人群与总体样本存在显著特征差异,经t 检验验证,该类人群平均为女性、年龄更大、教育水平更低、收入更低,且更不愿让他人驾驶自己的车辆,完成问卷的耗时也更短,两类人群的具体特征对比如表3所示。
表3 “一致性选择”人群与总体样本的特征对比
4.3潜变量提取结果
通过因子分析从30项态度陈述中提取出5个核心潜变量,经验证性因子分析验证,各潜变量与观测变量的载荷系数均显著,模型拟合效果良好(卡方值 936.591,自由度242,p<0.001;默认模型 RMSEA=0.062,独立模型 RMSEA=0.147)。各潜变量的观测陈述、载荷系数及参考来源如表4所示,5个潜变量分别为:支持自动驾驶情绪(PRO-AV)、环境关注(EC)、技术兴趣(TI)、公共交通态度(PTA)、驾驶乐趣(ED)。
表4 基于AMOS的5个潜变量验证性因子分析结果
4.4模型估计结果
本研究的最优模型为以色列与北美部分分段的嵌套LK模型,模型纳入潜变量和面板效应,拟合效果良好(R2= 0.397,调整后R2= 0.391),所有显著参数(95%显著性水平)符号均符合逻辑,核心参数估计结果如表5所示,模型关键结论如下:
嵌套结构特征:传统车辆与PAV被归为私人交通嵌套组,嵌套参数0.54(t=3.92),说明二者存在未观测的共同特征,如车辆所有权、使用自主性等。
面板效应特征:传统车辆、PAV、SAV 常数项的方差分别为 1.49、0.87、5.20,均在5%水平下显著,其中SAV的方差最大,表明个体对SAV的偏好异质性最强。
成本因素影响:PAV与传统车辆的相对成本比绝对成本更重要,PAV成本高于传统车辆时选择概率显著降低,反之则升高;以色列人更关注边际成本(出行成本),北美人更关注资本成本(购车/会员费);传统车辆停车成本上升会显著推动个体选择AV,停车成本对选择概率的弹性影响如图4所示。
社会经济特征影响:高教育水平者更倾向于选择AV(PAV和 SAV无差异);年长者更偏好传统车辆,对PAV和SAV的态度无显著差异;以色列女性比男性更不倾向于SAV,北美地区性别对AV选择无显著影响;家庭中幼儿数量越多,受访者越倾向于选择SAV。
通勤与使用特征影响:通勤时间越长,受访者越倾向于选择AV;通勤途中常办差事者更偏好传统车辆;习惯在车内存放物品者更不倾向于选择SAV。
潜变量影响:支持自动驾驶情绪(PRO-AV)对AV选择的正向影响最强,对PAV和SAV的影响无差异,其态度弹性如图6所示;驾驶乐趣(ED)正向影响传统车辆选择;环境关注(EC)正向影响SAV选择,对私人车辆无显著影响,其对选择决策的影响如图7所示。
无面板效应的补充模型还发现:学生、高技术兴趣者、年行驶里程更多者更倾向于AV;从不使用公共交通者更不倾向于SAV;北美人更在意AV的人工控制权,以色列人对AV技术的信任度更高,且环境关注对以色列人的选择影响更显著。
表5 嵌套LK模型估计结果(核心参数)
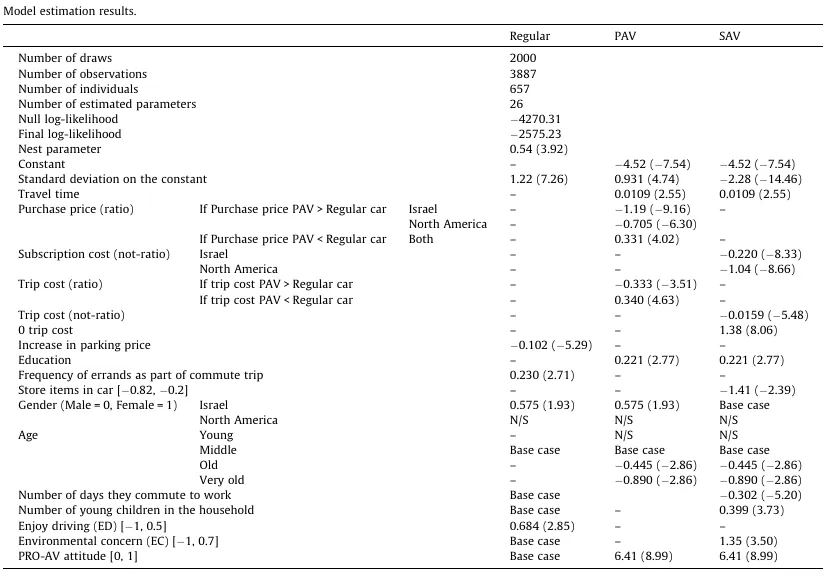
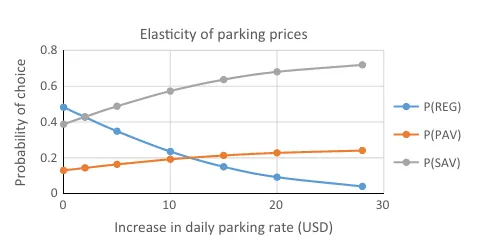
图4 停车价格弹性
4.5政策弹性分析
为验证各类政策对AV选择概率的影响,本研究对停车成本、SAV定价、潜变量进行弹性分析。结果表明,各类政策对AV选择均存在显著影响,且不同政策的干预效果存在差异
停车成本弹性:提高传统车辆的停车成本会显著促进个体选择AV,且选择SAV的增幅高于PAV,随着停车成本逐步上升,传统车辆的选择概率持续下降,SAV选择概率呈显著上升趋势,如图4所示。
SAV 成本弹性:SAV的零出行成本会显著提升其选择概率,即使SAV完全免费(零会员费+零出行成本),也仅有75%的个体愿意选择,25%的个体仍拒绝使用;SAV年度会员费1400美元+零出行成本的选择概率,与零会员费+单次出行成本2美元的选择概率持平,如图5所示。
潜变量弹性:提升支持自动驾驶情绪可显著降低传统车辆的选择概率,从93%降至6%,且对SAV选择概率的提升幅度高于PAV,如图6所示;提升环境关注程度会显著增加 SAV 的选择概率,对传统车辆和PAV的选择概率无显著影响,如图7所示。
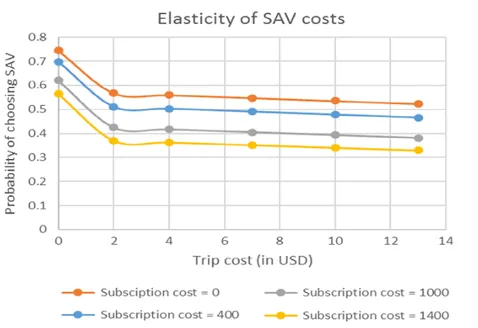
图5 SAV成本弹性(会员费与出行成本)
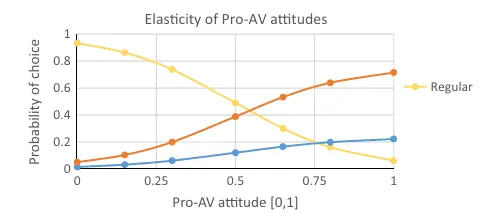
图6 支持自动驾驶(PRO-AV)态度弹性
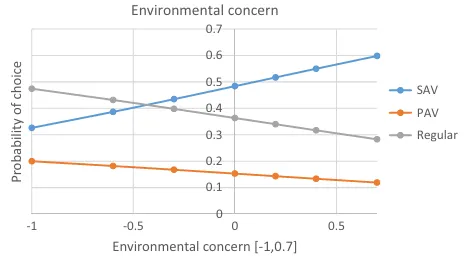
图7 潜变量“环境关注(EC)”对选择决策的影响
5.结论
目前公众对自动驾驶车辆(AV)的采纳存在明显犹豫,44%的选择仍倾向传统车辆,即便共享自动驾驶车辆(SAV)完全免费,仍有25%的个体拒绝使用;36%的受访者在实验中始终选择同一车型,且超六成选传统车辆,该类人群与总体样本在人口特征上差异显著,对新车型缺乏考量。因子分析提取5个潜变量中,支持自动驾驶情绪、驾驶乐趣、环境关注对车辆选择影响突出,其中支持自动驾驶情绪的作用最强,且这类潜变量可通过教育宣传等方式干预,进而改变个体选择行为。AV 与传统车辆的相对成本比绝对成本影响更大,提升传统车辆停车成本、实现 SAV 零边际成本能显著提高 AV 选择概率,且以色列人更关注边际成本,北美人更看重资本成本,定价政策需贴合区域特征。个体特征对 AV 选择影响显著,年轻人、高学历、长通勤等人群是早期潜在采纳者,年长者等群体更偏好传统车辆,家庭幼儿数量越多越倾向 SAV。以色列人比北美人更易接受 AV,对技术信任度也更高,性别对 AV 选择的影响仅在以色列地区显著。此外,公共交通使用习惯与 SAV 选择正相关,完善相关系统有助提升 SAV 接受度,而 AV 普及或引发通勤距离增加等问题,需提前做好预防。
6.参考文献
Chana J. Haboucha, Robert Ishaq, Yoram Shiftan (2017). User preferences regarding autonomous vehicles. Transportation Research Part C 78 (2017) 37–49.
7.点评
本研究通过含面板效应的嵌套logit核模型,量化了个体与车辆特征对自动驾驶车辆(AV)使用和接受度的影响。因子分析识别出技术兴趣、环境关注等五个潜变量,其中驾驶乐趣、环境关注和支持自动驾驶情绪对车辆选择决策影响显著,且这类态度变量可通过教育宣传干预,进而改变个体选择行为。研究发现以色列人比北美人更愿意接受AV,二者在成本关注上差异显著,以色列人更重视边际成本,北美人更关注资本成本,定价政策需贴合区域特征。目前公众对AV采纳存在明显犹豫,44%的选择仍倾向传统车辆,即便共享自动驾驶车(SAV)完全免费,仍有25%的个体拒绝使用,36%的受访者会一致性选择同一车型,对新车型缺乏考量。研究还明确了AV早期潜在采纳者特征,同时发现提升传统车辆停车成本、强化公众环保意识、完善公共交通系统,能有效推动SAV的使用。此外,AV普及或引发通勤距离增加、城市蔓延等问题,需提前制定预防措施,而AV的市场推广与转型进程,也依赖于政府政策与个体行为的共同作用。
注:由于水平有限,翻译中难免存在不准确或错误之处,请以原文为准,并欢迎指正。
知识搬运工(翻译者)丨 吉丹凤
审核丨 董俊
出品丨 合肥工业大学 运输与安全研究所
版权声明
本文为《合肥工业大学 运输与安全研究所》独家撰写,如需转载,
请注明出处,谢谢!


