一份长达20页的征求意见稿,揭示了港口自动驾驶系统从功能要求到测试验证的全套技术规范。
近日,一份名为《智能网联汽车 港口自动驾驶系统技术规范》的汽车行业标准草案完成。这份文件将深刻影响港口自动驾驶系统的研发、测试与落地应用。
从通用要求到八大核心功能,从试验条件到具体测试方法,这份标准构建了一个完整的港口自动驾驶技术框架。本文将深入解读这份草案的核心内容,为汽车技术工程人员提供一份实用的技术指南。
01 标准概览:聚焦港口场景的自动驾驶规范
这份汽车行业标准草案专门针对港口集装箱运输场景,适用于搭载自动驾驶系统的N3类车辆(最大总质量超过12吨的载货汽车)。
标准框架包括三个核心部分:一般要求、功能要求和试验方法。其中一般要求又分为通用要求和功能要求,试验方法则详细规定了各类测试场景的具体实施步骤。
图:标准封面示意图
值得注意的是,标准明确引用了多项现有国家标准,包括《GB/T 40429—2021 汽车驾驶自动化分级》、《GB/T 44373—2024 智能网联汽车 术语和定义》、《GB 44495—2024 汽车整车信息安全技术要求》等,体现了标准体系的连贯性。
02 通用要求:系统设计与安全基础
标准第四章详细规定了自动驾驶系统的通用要求,这是整个系统设计的基础。
设计运行条件(ODC) 是首要要求。系统必须具有明确的ODC,且能适应我国内河与沿海港口典型环境。这意味着系统设计必须考虑港口特有的环境因素,如盐雾腐蚀、强风、复杂路面条件等。
自检及故障诊断 要求系统在激活前和运行过程中持续进行自检和故障诊断,包括检查控制部件、执行部件、传感元件是否正常运行,以及当前车辆状态是否影响系统运行。
故障等级 分为低风险和高风险两类。低风险故障不影响系统安全运行,系统可继续完成当前作业任务,但需尽快进入安全区域停车;高风险故障则直接影响系统安全运行,系统需执行最小风险策略。
状态转换 机制包括未激活状态和激活状态,其中激活状态又分为正常运行状态和最小风险策略状态。标准明确了各种状态之间的转换条件和要求。
最小风险策略 是安全核心。当系统检测到运行环境超出ODC或出现高风险故障时,必须执行最小风险策略:开启并保持危险警告信号,在当前车道或路边安全停车。特别值得注意的是,仅当系统退出或车辆静止时才终止最小风险策略,且危险警告信号不应因系统退出而关闭。
功能安全和预期功能安全 要求符合GB/T 44721-2024附录A的要求,信息安全 需符合GB 44495的要求,数据存储和记录 需符合GB 44497的要求。
远程交互 能力是港口自动驾驶的特色要求。系统必须能够响应远程控制平台的各种指令,上传车辆动态信息和异常状态信息,并在执行最小风险策略后,在保证安全的前提下通过远程控制使车辆行驶至指定区域。
通信要求 具体而严格:带宽≥80 Mbps,传输时延≤30 ms,可靠性≥99.99%。这些指标确保了远程控制的实时性和可靠性。
03 功能要求:八大核心能力详解
标准第四章第二节规定了自动驾驶系统的八大核心功能要求,这些功能直接决定了系统在港口环境下的作业能力。
自动紧急避险 是基础安全功能。系统必须实时检测周围环境,在可能发生碰撞危险时使车辆减速,避免与障碍物发生碰撞。
周边车辆行驶状态识别及响应 要求系统能够识别前方及相邻车道车辆,保持安全距离,在跟车行驶起停过程中,试验车辆起动时间应不大于10秒。
车道居中行驶 的精度要求严格:相对车道中心线横向最大偏差不超过±10厘米;横向加速度不大于3 m/s²;横向加速度变化率在0.5秒内的移动平均值不大于3 m/s³。
换道功能 包括自动换道和指令换道。换道过程中最大横向加速度不大于2.5 m/s²,车辆进入目标车道后,车身回正时横向最大偏差不超过±10厘米。
路口通行 要求系统能够合理规划行驶路径,正确使用转向信号灯,避免与其他车辆等目标物发生碰撞。
自主对位 是港口作业的关键能力。系统必须实现高精度定位,在港口作业设备(如龙门吊、桥吊等)相对位置精准停车,以完成作业任务。
悬空柜/吊具识别及响应 是港口特有功能。系统必须能够向上检测悬空柜/吊具,并根据高度检测结果进行停车和车辆起步控制。
锁站交互 能力要求系统能够正确驶入、驶出装卸锁通道,不与锁站发生物理接触;在装卸锁通道内停车后,车身与车道边缘线的夹角不超过2度;完成卸锁作业后,起动时间不超过10秒。
04 试验条件:标准化测试环境
标准第五章第一节详细规定了试验条件,确保测试结果的可比性和可重复性。
试验场地 必须满足:良好附着能力的混凝土或沥青路面;具备自动驾驶模式正常开启的必要数据和设施条件;道路及基础设施符合GB 14886、GB 14887要求;车道宽度不小于3.0米。
试验环境 应在天气良好且光照正常的环境下进行,电磁环境不应影响试验结果。如果车辆设计运行条件包含特殊天气或夜晚光照条件,则需相应开展特殊环境试验。
试验设备 要求严格:车内外视频采集设备分辨率不小于1920×1080像素;运动状态采样和存储频率不少于50 Hz;速度采集精度不大于0.1 km/h;位置采集精度不大于0.1米;加速度采集精度不大于0.1 m/s²。
试验记录内容 必须完整,包括:系统软硬件版本信息;控制模式;车辆运动状态参数(位置、速度、加速度);灯光和提示信息状态;车内视频及语音监控;行驶状态视频;目标物位置及运动数据。
试验车辆载荷 要求在满载状态下进行试验,且试验开始后不改变载荷状态。
05 试验方法:八大功能测试场景全解析
标准第五章第二节详细规定了八大功能的测试方法,每种功能都对应多个具体测试场景。
自动紧急避险测试 包括四个场景:车道中间有静止障碍物、静止车辆占用部分车道、行人横穿道路、行人沿道路行走。测试车辆以30 km/h的速度驶向目标,要求不与障碍物发生碰撞。
图:车道中间有静止障碍物场景示意图
周边车辆行驶状态识别及响应测试 包括四个场景:前方车辆切入、前方车辆切出、目标车辆停/走、对向车辆借道行驶。测试要求系统能够正确识别和响应周边车辆状态,保持安全距离。
车道保持测试 在存在静止桥吊的港区码头作业区域进行,测试车辆以20 km/h匀速行驶,要求保持车道居中,横向偏差不超过±10厘米。
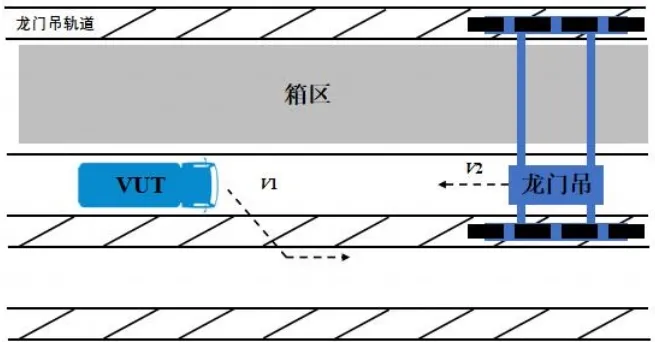
换道测试 分为自动换道和指令换道两种。自动换道测试双箱区跨龙门吊作业场景;指令换道测试栏间道换道时遭遇龙门吊对向行驶场景。换道过程中最大横向加速度不大于2.5 m/s²。
图:双箱区跨龙门吊作业示意图
路口通行测试 包含六种复杂场景:接驳道路右侧/左侧车道有障碍物、单桥吊/双桥吊场景、左转/直行入栏遭遇龙门吊转道、目的贝位有集卡作业时入栏。这些场景全面覆盖了港口路口通行的各种复杂情况。
自主对位测试 分为桥吊下自主停车对位和箱区自主停车对位两种场景。要求纵向停车误差不超过5厘米,车身与车道边缘线夹角不超过2度,停车调整次数不超过3次。
悬空柜/吊具识别及响应测试 模拟悬空柜离地3米和6米两种情况,要求系统能够正确检测悬空柜高度,并做出相应的停车和起步决策。
锁站交互测试 模拟卸锁作业全过程,要求车辆能够正确驶入、驶出装卸锁通道,不与锁站发生刮擦,停车后车身夹角不超过2度,卸锁后起动时间不超过10秒。
06 技术挑战与工程实践建议
对于汽车技术工程人员,面对这一即将实施的行标草案,需要从以下几个方面应对挑战:
高精度定位与对位技术 是港口自动驾驶的核心挑战。标准要求的纵向停车误差不超过5厘米,这对定位系统的精度提出了极高要求。工程实践中需要融合GNSS、IMU、激光雷达、视觉等多传感器数据,实现厘米级定位。
复杂环境感知与决策 港口环境包含大量动态障碍物(龙门吊、桥吊、其他车辆、行人)和静态障碍物(集装箱、锁站、建筑物)。系统需要具备全方位的感知能力,特别是向上的悬空柜检测能力,这在传统自动驾驶中较为少见。
通信可靠性与远程控制 99.99%的可靠性要求和30毫秒的时延要求,对通信系统提出了严峻挑战。工程实践中需要考虑多链路冗余、边缘计算等技术方案,确保远程控制的实时性和可靠性。
功能安全与预期功能安全 港口作业环境复杂,系统必须确保功能安全,同时应对各种预期功能安全场景。这需要从系统设计阶段就引入功能安全理念,进行全面的危害分析和风险评估。
测试验证的全面性 标准规定的测试场景多达数十种,涵盖了港口作业的各个方面。工程实践中需要建立完善的测试体系,包括仿真测试、封闭场地测试和实际港口测试,确保系统在各种场景下的安全性和可靠性。
07 标准意义与行业影响
这份技术规范草案的发布,标志着港口自动驾驶进入了标准化、规范化发展的新阶段。
对于整车企业,标准提供了明确的技术要求和测试方法,有助于统一技术路线,降低研发成本,加快产品落地。
对于零部件供应商,标准明确了系统各部件的性能要求,为传感器、控制器、执行器等关键部件的研发提供了方向。
对于港口运营方,标准确保了不同厂商的自动驾驶系统能够满足基本的安全和性能要求,降低了采购和运营风险。
对于监管部门,标准提供了监管依据,有助于规范市场秩序,促进行业健康发展。
从更宏观的角度看,港口自动驾驶的标准化将推动整个智慧港口建设,提高作业效率,降低运营成本,增强港口竞争力,为我国港口自动化、智能化发展提供技术支撑。
港口自动驾驶是自动驾驶技术商业化落地的重要场景之一。这份技术规范草案的制定,体现了我国在自动驾驶标准化方面的前瞻性和系统性。
对于汽车技术工程人员而言,深入理解标准要求,掌握关键技术,将成为在港口自动驾驶领域取得竞争优势的关键。智慧港口的未来,属于那些既能创新又能满足严格标准要求的工程师。
关注下面的微信公众号,回复关键字“20260324”免费获取上述标准全文

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
