理解防御策略的前提是精准识别攻击路径。雨水对纯视觉自动驾驶的威胁呈现四层递进式渗透。
第一层是物理层的光学畸变。雨滴附着于镜头表面时,由于水的折射率(1.33)与空气差异显著,入射光线发生不规则折射与散射,导致成像模糊、对比度下降。实验数据显示,单颗直径3mm的水滴在10cm焦距镜头上可造成局部区域超过50%的对比度损失,这种非均匀的像差使得传统的图像锐化算法难以复原。
第二层是数据层的动态污染。与静态污渍不同,雨滴在行驶气流作用下呈现高速运动轨迹,造成像素级的运动模糊。同时,水膜对光的镜面反射会导致局部过曝,尤其是在夜间对向车辆大灯照射下,CMOS传感器容易出现高光溢出(blooming)现象,淹没邻近车道线的微弱信号。
第三层是算法层的分布偏移。当前主流的目标检测与车道线识别模型多在晴朗天气数据集上训练,面对雨天特有的水渍纹理、路面反光等特征时,模型面临严重的OOD(Out-of-Distribution)问题。研究表明,在暴雨条件下,基于CNN的车道线检测误报率可上升300%,部分算法甚至将密集雨滴误判为道路标线,产生致命性的假阳性检测。
第四层是系统层的单点脆弱。纯视觉方案缺乏异构传感器的冗余备份,一旦多路摄像头同时被雨水遮挡,系统无法像激光雷达方案那样依靠点云数据维持短时定位,只能触发功能安全降级,这在高速场景下意味着极大的追尾风险。
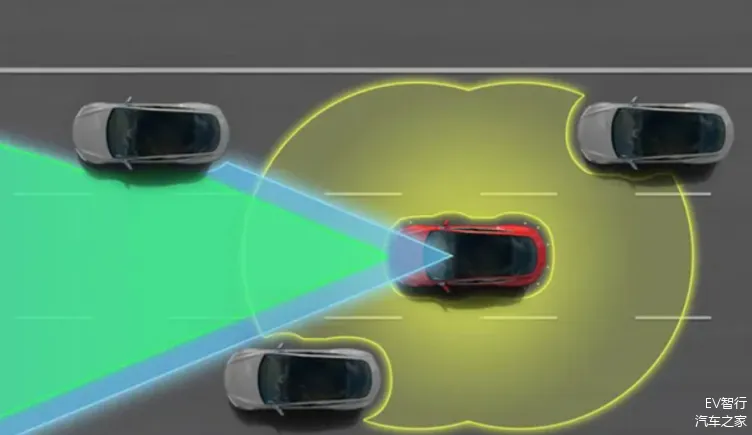 图:纯视觉方案(绿色区域)与融合方案(黄色区域)的感知覆盖差异,凸显单一模态的脆弱性。
图:纯视觉方案(绿色区域)与融合方案(黄色区域)的感知覆盖差异,凸显单一模态的脆弱性。
防御体系:从物理清洁到算法增强的三层架构
针对上述四层威胁,产业界构建了"硬件清洁-算法增强-系统协同"的三层防御体系,每层防御都针对特定层级的攻击路径。
在硬件层的主动防御方面,特斯拉于2025年1月通过官方AI账号确认,正在开发一套"comprehensive cleaning solution"(全面清洁解决方案)。具体而言,Cybertruck前摄像头已配备类似大灯清洗的喷射喷嘴,可利用高压水流清除泥水;然而其后摄像头仍缺失该装置,这导致在越野或潮湿环境下后视视野极易失效,用户不得不依赖第三方防水罩进行临时防护。

图:特斯拉Cybertruck前摄像头位置示意图,位于前保险杠格栅后方,已集成清洗喷嘴
相比之下,Waymo在其第五代传感器清洁系统中采用了更精细的差异化策略:车顶主摄像头配备微型雨刮与脉冲空气喷射(Pulsed Air-Puffer)协同工作,而侧向摄像头则依靠疏水(Hydrophobic)涂层配合空气动力学导流设计,利用行驶气流自然排走水滴。这种"接触式+非接触式"的混合清洁策略,可在每秒20mm降雨量的环境下维持80%以上的有效成像时间。
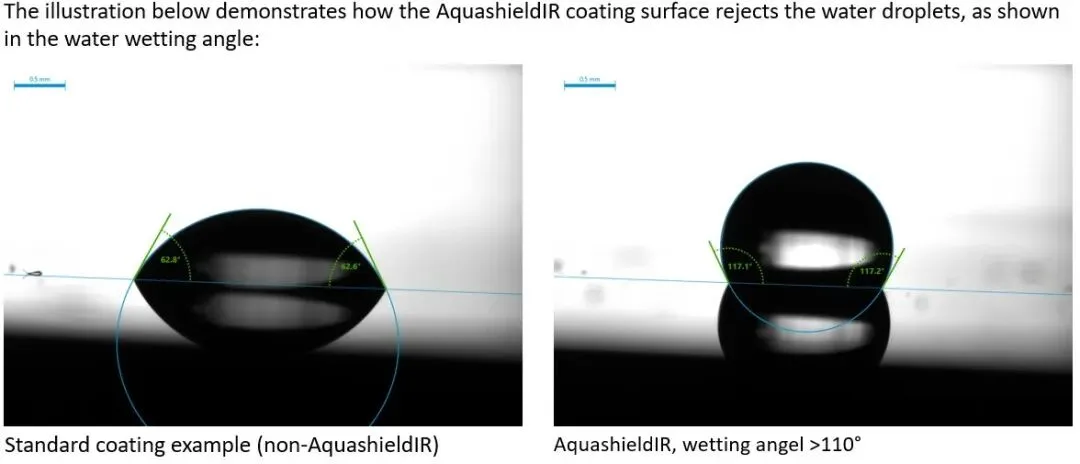
图:疏水涂层(右)与普通涂层(左)的接触角对比,疏水表面可使水珠保持球状滚落
过渡至算法层,当物理清洁无法完全消除水渍干扰时,计算摄影技术成为第二道防线。2024年计算机视觉顶会CVPR收录的NeRD-Rain算法代表了当前去雨技术的最前沿。该技术采用双向多尺度隐式神经表示(INR),将基于像素坐标的神经表示与Transformer架构结合,在真实雨天数据集SPA-Data上将图像质量指标(PSNR)提升了1.04 dB。而在产业端,蔚来汽车自研的"神玑安全影像系统"通过多域智能降噪技术,在ISP(图像信号处理器)硬件层面实现雨雾消除,即使在夜间雨雾双重干扰下,仍能将关键物体轮廓的识别准确率维持在95%以上。

图:雨天图像增强算法效果对比:左上为晴天原图,右上为雨天输入,左下为攻击扰动,右下为去雨算法恢复结果,可见车辆检测置信度从0.26恢复至0.90
小鹏汽车的AI鹰眼方案则采用了800万像素摄像头配合Lofic技术,通过提升单像素满阱容量,将雨雪天气下的有效感知距离提升了125%,识别响应速度加快40%。
从算法层向上延伸至系统层的协同降级,现代自动驾驶架构开始集成"置信度感知"机制。Waymo的系统通过神经网络实时分析图像清晰度,当检测到雨量达到中雨级别时,自动触发保守驾驶策略:纵向跟车距离增加50%,横向变道置信度阈值提升30%,车速上限下调至道路限速的80%。这种感知-决策闭环,确保在视觉受限时系统行为仍保持安全边际。此外,特斯拉传闻中的新款车型正探索引入4D毫米波雷达作为视觉的"低成本影子模式",在摄像头完全失效的极端场景下提供10-15秒的短时环境感知缓冲,为驾驶员接管争取关键时间窗口。
前沿突破:超越传统CMOS的感知革命
现有基于硅基CMOS的视觉方案在物理层面存在固有局限,这催生了新一代传感技术的探索。在2026年CES展会上发布的太赫兹视觉传感器(Teradar Summit)提供了全新解决路径。该传感器工作在0.1-10THz波段,介于毫米波雷达与激光雷达之间,兼具厘米级分辨率与对雨雾微粒的穿透能力。实测数据显示,在能见度低于50米的暴雨环境中,太赫兹传感器仍可稳定探测200米内的车辆轮廓,且不受水膜镜面反射干扰。
与此同时,神经形态视觉技术(Neuromorphic Vision)通过脉冲相机(Event Camera)实现了时间维度的连续采样。与传统帧式相机不同,脉冲相机以微秒级时间分辨率记录像素级亮度变化,配合脉冲流直接影像重建算法,可在雨滴快速运动场景中捕捉静态背景的一致性特征。
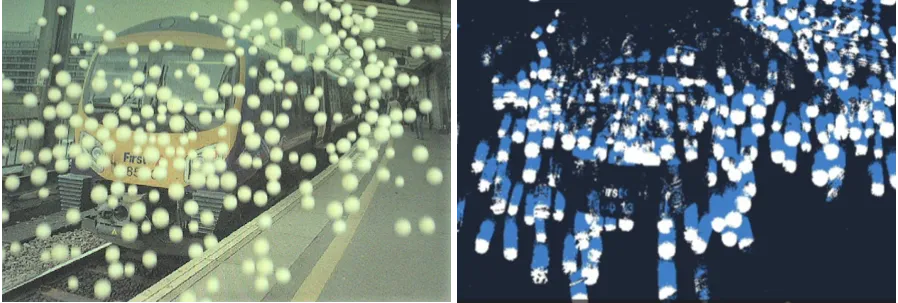 图:脉冲相机(神经形态视觉)在雨天场景的成像原理:左图为传统相机拍摄的雨点模糊图像,右图为脉冲相机捕获的事件流,可分离动态雨滴与静态背景
图:脉冲相机(神经形态视觉)在雨天场景的成像原理:左图为传统相机拍摄的雨点模糊图像,右图为脉冲相机捕获的事件流,可分离动态雨滴与静态背景
2024年的学术研究显示,该方案在动态雨滴噪声抑制方面较传统CMOS方案提升了3个数量级的时间分辨率,为高动态范围雨夜驾驶提供了新的硬件基础。
产业实践:头部玩家的技术路线图对比
不同厂商基于其技术路线定位,形成了差异化的雨天应对策略。
特斯拉作为纯视觉路线的坚定推行者,其技术演进呈现"算法优先,硬件补足"的特征。FSD V12版本采用端到端神经网络,通过数百万辆车的雨天行驶数据训练,系统对水渍畸变的鲁棒性较V11版本提升了约40%。然而,硬件清洁的滞后成为明显短板——前摄像头的喷水系统与后摄像头的完全缺失形成鲜明对比,这反映出其在降本与功能完整性之间的权衡困境。

图:Cybertruck后摄像头第三方清洗装置实拍,可见高压水流喷射轨迹,弥补原厂设计缺失
小鹏汽车则采取"算法+传感器增强"的双轮驱动策略。其XNGP系统在2024年转向纯视觉架构时,同步引入了基于M2GAN(多阶段自注意力网络)的去雨模块。该算法在包含15,000对真实雨天图像的自采集数据集上训练,实现了PSNR 22.65、SSIM 0.7375的图像质量指标。同时,通过保留4D毫米波雷达作为视觉冗余,小鹏在暴雨场景下的系统可用性较纯视觉方案提升了约25%。
蔚来汽车的路径更为强调工程化落地。其神玑系统并非单一算法,而是整合了ISP硬件加速、去雨神经网络与传感器清洁控制的系统级方案。通过将计算摄影 pipeline 固化到自研芯片,蔚来实现了雨天图像增强的毫秒级延迟,确保感知结果能实时输入下游的规控模块,避免因计算延迟导致的决策滞后。
待解难题与未来展望
尽管技术进步显著,纯视觉方案的雨天应用仍面临三重未解挑战。
首先是极端复合场景的覆盖盲区。当前机械清洁系统在冬季道路盐渍与泥浆混合污染场景下表现不佳。特斯拉Cybertruck用户的反馈显示,含盐泥浆的粘附力较纯水渍高出5倍以上,高压水喷射需要持续3秒以上才能清除,这在高速行驶中是不现实的。车规级疏水涂层的耐久性同样存疑,现有纳米涂层在经受500次洗车循环后,其接触角(疏水性能指标)会衰减40%,导致防护效能显著下降。
其次是算法泛化的长尾风险。现有的NeRD-Rain、M2GAN等算法虽然在特定数据集上表现优异,但面对真实世界中千变万化的降雨强度、光照角度与水渍形态时,仍存在偶发性的失效案例。更重要的是,这些算法多基于监督学习,对训练数据未覆盖的极端天气(如台风伴随的横向暴雨)缺乏鲁棒性。
最后是标准化与评测体系的缺失。行业目前缺乏统一的雨天感知性能评测标准,如不同降雨量等级(小雨/中雨/暴雨)对应的具体技术指标、水膜厚度与成像质量的定量关系等。这种标准的空白导致各厂商的技术宣称难以横向比较,也增加了消费者认知的混乱。
结论:没有银弹,只有系统性韧性
纯视觉自动驾驶在雨天场景的生存能力,不取决于某项单一技术的突破,而依赖于"清洁硬件-增强算法-冗余架构"三角体系的系统性韧性。从特斯拉的喷水喷嘴到NeRD-Rain的神经表示,从太赫兹传感器的物理层创新到世界模型的推理层补全,产业界正在多维度构建防御纵深。
然而,技术现实是残酷的:在当前阶段,纯视觉方案在暴雨环境下的可靠性仍显著低于多传感器融合方案。对于行业而言,务实的路径是在限定场景(如城市低速导航)内逐步释放纯视觉功能,同时持续积累恶劣天气数据以训练更鲁棒的算法。对于消费者,理解技术的边界并保持必要的接管准备,仍是雨天使用辅助驾驶的安全底线。雨幕之下的感知保卫战,注定是一场持久战,而非速决战。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
