基于3s集成的自动驾驶技术应用
基于3s集成的自动驾驶技术应用
摘要
在汽车产业持续高速发展的背景下,自动驾驶技术已然成为交通领域的核心研究方向。3S技术(GPS、GIS、RS)作为现代信息技术的重要支撑,在自动驾驶系统中承担着不可或缺的关键功能。本文简要介绍3S技术的核心原理与技术特性,重点分析其在自动驾驶场景下的实际应用,主要涵盖精准定位、智能路径规划、复杂环境感知等关键环节。同时,针对当前3S技术应用于自动驾驶所存在的问题进行梳理,并对其未来发展方向作出展望。本研究围绕3S技术与自动驾驶的融合应用展开分析,期望为自动驾驶技术的完善与创新提供相应的理论依据与技术借鉴。关键词 3S技术;自动驾驶;车辆定位;路径规划;环境感知Abstract
Against the backdrop of the sustained rapid development of the automotive industry, autonomous driving technology has become a core research focus in the transportation field. As an important pillar of modern information technology, 3S technology (GPS, GIS, RS) undertakes indispensable key functions in autonomous driving systems. This paper briefly introduces the core principles and technical characteristics of 3S technology, and emphatically analyzes its practical applications in autonomous driving scenarios, mainly including precise positioning, intelligent path planning, and complex environmental perception. Meanwhile, it sorts out the existing problems in the application of 3S technology to autonomous driving and prospects its future development direction. Focusing on the integrated application of 3S technology and autonomous driving, this study expects to provide corresponding theoretical basis and technical reference for the improvement and innovation of autonomous driving technology.Keywords 3S technology; autonomous driving; vehicle positioning; path planning; environmental perception一、引言
自动驾驶技术的诞生,为破解交通拥堵、提升道路安全、减少能源消耗等行业痛点开辟了全新路径。3S技术作为空间信息技术的核心支柱,可为自动驾驶系统提供精准的位置服务、完备的地理信息数据与实时的环境感知能力,是自动驾驶技术落地的核心支撑技术。伴随传感器、通信与计算机技术的持续迭代,3S技术在自动驾驶领域的应用场景正不断拓展、持续深化。人类驾驶车辆无需掌握车辆的经纬度信息,而自动驾驶车辆则必须获取自身的绝对定位数据,其根本原因在于二者环境感知能力的本质差异。人类可凭借视觉、经验与认知,精准识别周边可行驶区域、道路边界、车道线、障碍物及交通规则等核心信息,以此实现车辆的安全操控[1]。但当前车载环境感知传感器与算法,尚未达到与人类相当的感知水平,自动驾驶车辆对周边环境的精准理解,离不开高精定位、高精地图、多源融合感知等技术的协同支撑[2]。二、3S技术概述
2.1 GPS(全球定位系统)
GPS即全球定位系统,是依托卫星导航实现空间定位的技术体系,整体由空间卫星星座、地面测控站以及用户终端设备三大部分构成。其基本工作原理是通过测算卫星与用户终端之间的信号传播距离,结合三角定位原理解算出终端的具体位置。GPS具备定位精度高、可全天候作业、覆盖范围全球等优势,能够持续为自动驾驶车辆提供精准的位置坐标与行驶速度数据。2.2 GIS(地理信息系统)
地理信息系统GIS是专门用于处理地理空间信息的计算机软硬件系统,可完成地理数据的采集、存储、管理、分析运算与可视化展示等工作。在自动驾驶场景中,GIS的核心价值在于提供高精度地图与各类地理信息,为车辆路径规划与智能导航提供数据支撑。借助对地图数据的深度分析,车辆可获取道路形态、坡度、曲率及相关交通规则等关键信息,保障行驶过程安全高效。2.3 RS(遥感技术)
遥感技术RS以非接触式方式获取目标地物信息,主要通过各类传感器接收并记录目标物体反射与辐射的电磁波信号。在自动驾驶领域,RS可用于采集道路周边环境信息,包括地形地貌、建筑物分布、植被覆盖等,为车辆环境感知模块提供数据来源。同时,遥感技术也可用于交通流量监测、实时路况识别等,为交通管控与调度决策提供可靠依据。三、3S在自动驾驶中的应用
3.1 车辆定位
精准可靠的车辆定位是实现自动驾驶的前提条件,GPS在定位环节中承担着核心功能。车载GPS接收机通过接收多颗卫星信号,可解算出车辆的经度、纬度、高度三维坐标,同时获取速度与时间信息。但单一GPS定位存在明显局限,在城市高楼密集区、隧道等遮挡环境下,卫星信号易衰减或中断,造成定位精度降低甚至失效。为解决此类问题,工程中常采用GPS与惯性导航系统(INS)融合的定位方案。当前卫星与惯导组合的实现方式较多,可适配不同性能需求与应用场景。以卡尔曼滤波器为核心的最优估计理论,为组合导航系统提供了重要理论支撑并得到广泛应用。该方法在导航系统输出数据基础上,通过卡尔曼滤波剔除噪声,估算系统误差状态并完成实时校正,以此优化组合导航整体性能,提升定位精度[2]。INS依靠加速度与角速度测量值推算车辆位置与姿态变化,自主性强且不易受外部环境影响,但定位误差会随时间不断累积。GPS与INS融合能够互补短板,实现高精度、高稳定性定位。数据融合主要分为松耦合与紧耦合两类:松耦合模式下GPS与INS各自独立解算,再通过融合算法整合定位结果;紧耦合则在观测层直接融合原始数据,定位精度更高。此外,地图匹配定位方法在自动驾驶中也较为常用。该方法将GPS定位结果与高精地图道路信息进行比对匹配,借助道路拓扑与几何特征修正GPS偏差,进一步提升定位可靠性。例如当GPS定位出现偏移,显示车辆处于两条道路之间时,地图匹配算法可判定实际行驶道路,实现更精准的定位。3.2 路径规划
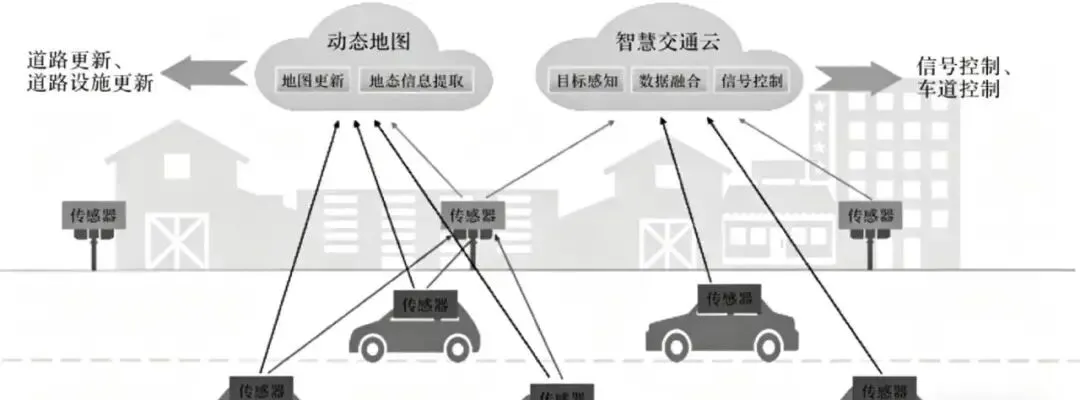
路径规划是自动驾驶车辆依据当前位置与目标地点,在地图中规划最优行驶路线的核心功能。GIS凭借海量地图数据与强大的空间分析能力,在路径规划中起到关键支撑作用。路径规划算法多基于图搜索理论,把道路网络抽象为由节点与边构成的拓扑图,节点对应路口或关键点位,边对应路段并赋予长度、耗时、拥堵程度等权重信息。常用算法包括Dijkstra算法、A算法等。Dijkstra算法作为经典最短路径算法,通过逐步扩展距起点最近节点,实现全局最短路径搜索。A算法在其基础上加入启发函数,通过预估当前节点至终点的距离,优先搜索更优路径,显著提升计算效率。实际应用中,路径规划还需结合实时交通信息。车辆与交通信息中心交互,可获取实时拥堵、事故、临时管制等路况数据,并据此动态调整路线,避开拥堵区域。当前方路段出现拥堵时,系统可重新规划路线,选择车流量更小的替代道路,有效缩短通行时间。图为:“众包+车路协同”的采集模式与边云协同的计算处理模式(来源:李德仁,洪勇,王密,等.测绘遥感能为智能驾驶做什么? [J].测绘学报,2021,50(11):1421-1431.DOI:10.11947/j.AGCS. 2021.20210280.)[3]3.3 环境感知
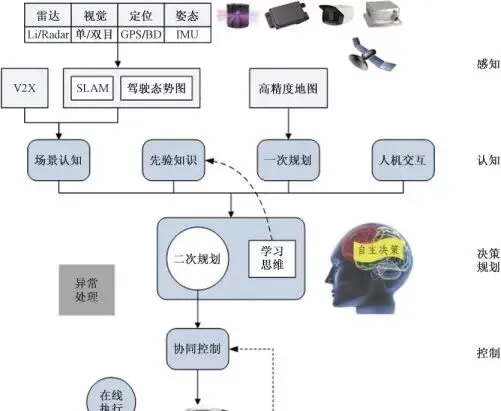
环境感知是自动驾驶车辆对周围环境信息的获取和理解过程,是实现自动驾驶的关键环节之一。RS技术以及车载传感器(如摄像头、激光雷达、毫米波雷达等)在环境感知中发挥着重要作用。如激光雷达传感器通过对地物表面进行三维扫描采样,快速获取大规模、无结构、无序的3D(Three-dimensional)点云数据,其中每个点均包含空间坐标和某些属性信息(如反射强度 intensity),是现实世界简单而真实的表征[4]。基于3D 点云的三维环境感知技术主要分为立体栅格法、二维投影法,原始点云法。其中,立体栅格法[5]将初始点云按照其空间几何关系体素化,转换成包含拓扑结构、具备相邻相关性的三维栅格形式,再进行后续处理;二维投影法[6]则是先将初始3D 点云数据映射到不同视角平面上,转换成诸如前视图、鸟瞰图等 2D 图像,再输入到算法中;原始点云法则直接处理初始 3D 点云。RS技术可以从宏观层面为自动驾驶车辆提供道路周边的环境信息,如地形地貌、建筑物分布、植被覆盖等。通过对遥感影像的分析,车辆可以提前了解行驶区域的地形特征,为行驶决策提供参考。例如,在山区行驶时,通过遥感影像获取的地形信息可以帮助车辆提前调整车速和行驶姿态,以适应复杂的地形条件。车载摄像头可以捕捉车辆周围的视觉图像信息,通过计算机视觉算法对图像进行处理和分析,识别出道路标志、交通信号灯、行人、其他车辆等目标物体。例如,基于深度学习的目标检测算法可以快速准确地识别出图像中的各种交通元素,并确定它们的位置和类别。激光雷达通过发射激光束并接收反射光,来获取周围环境的三维点云数据。通过对三维点云数据的处理和分析,车辆可以精确地感知周围物体的形状、位置和距离,构建出高精度的环境地图。毫米波雷达则利用毫米波频段的电磁波来检测目标物体的距离、速度和角度,具有穿透性强、不受恶劣天气影响等优点,在自动驾驶中常用于近距离目标检测和避障。多种传感器数据融合技术也是环境感知中的重要研究方向。由于不同传感器具有各自的优缺点,通过将摄像头、激光雷达、毫米波雷达等传感器的数据进行融合,可以实现优势互补,提高环境感知的准确性和可靠性。常见的数据融合方法有数据层融合、特征层融合和决策层融合。数据层融合是指在原始数据层面将不同传感器的数据进行合并处理;特征层融合是先从各传感器数据中提取特征,然后将这些特征进行融合;决策层融合则是各传感器独立进行处理和决策,最后将决策结果进行融合。图为:自动驾驶垂直化过程。(来源:论文:1.中国科学院微电子研究所,北京100029; 2.江苏物联网研究发展中心,无锡 214135; 3.无锡物联网创新中心有限公司,无锡 214135.图六)[7]四、3S技术在自动驾驶应用中面临的挑战
4.1 数据处理与传输
3S技术应用于自动驾驶场景时,会源源不断产生海量多类型数据,涵盖GPS定位数据、GIS地理地图数据、RS遥感影像数据,以及各类车载传感器采集的感知数据等。这类数据的高效处理与实时传输,对车载计算性能、通信网络带宽都提出了极为严苛的要求。如何快速完成海量数据的解析、分析与筛选,以及如何在车与车(V2V)、车与基础设施(V2I)之间搭建稳定、高速的数据传输通道,成为当前亟待攻克的核心难题。比如在实时交通信息同步更新、高精度地图数据传输过程中,极易出现数据延迟、丢包等问题,直接干扰自动驾驶车辆的决策判断与行驶控制。4.2 定位精度与可靠性
尽管GPS等卫星定位技术已能实现较高精度的定位服务,但在城市高楼峡谷、地下停车场、隧道等复杂封闭环境中,其定位精准度与运行稳定性仍难以满足自动驾驶需求。与此同时,多系统融合定位技术虽在一定程度上优化了定位效果,但不同定位系统之间的兼容适配、协同作业能力,还需要进一步深度优化。例如当GPS信号遭遇遮挡或干扰时,如何保障惯性导航系统、地图匹配等辅助定位技术,能够快速衔接并输出精准、稳定的定位信息,是亟需解决的关键技术问题。4.3 地图数据的更新与维护
高精度地图是自动驾驶安全运行的重要基础,地图数据的精准性、实时性,直接决定自动驾驶的安全性与可靠性。但现实场景中,道路状况、地理环境始终处于动态变化中,如何实现地图数据的及时更新、长效维护,确保地图信息与实际路况完全匹配,是行业面临的一大挑战。诸如道路施工、新建建筑物落成、交通规则调整等各类变化,都需要第一时间同步至地图数据库,若更新不及时,极易导致自动驾驶车辆做出错误行驶决策,引发安全隐患。4.4 系统安全性与隐私保护
伴随3S技术在自动驾驶领域的规模化应用,系统网络安全与用户隐私保护问题愈发凸显。不法分子可能通过黑客技术攻击车辆定位系统、车载通信网络或地图数据库,窃取车辆位置、行驶轨迹等敏感隐私数据,甚至非法控制车辆行驶,对驾乘人员的生命安全与个人隐私造成极大威胁。因此,如何构建全方位、高效率的安全防护体系,全方位保障自动驾驶系统的运行安全与用户数据隐私,是当下亟待解决的重要课题。五、3S技术在自动驾驶中的发展趋势
5.1 多源数据融合与智能化处理
未来3S技术在自动驾驶领域的应用,将更加侧重多源数据的深度整合与智能化处理。通过将GPS、GIS、RS技术与车载各类传感器数据有机结合,搭配人工智能、机器学习等前沿算法,实现对周边环境信息更全面、精准的感知与解读,全面提升自动驾驶系统的自主决策能力与智能运行水平。例如借助深度学习算法对融合后的多维度数据进行深度分析,实现复杂交通场景的实时识别与路况预测,为车辆行驶决策提供更可靠、更全面的数据支撑。5.2 高精度定位技术的迭代升级
为适配自动驾驶对超高精度定位的需求,各类定位技术将持续优化升级。未来不仅会进一步提升GPS定位的精度与稳定性,还将加大卫星通信高精度定位、5G网络定位、北斗定位等新型定位技术的研发与应用力度。同时,多系统融合定位技术也将朝着智能化、自适应化方向发展,突破现有技术局限,实现更精准、更稳定、更抗干扰的车辆实时定位,满足复杂场景下的定位需求。5.3 地图技术的创新突破
高精度地图将逐步朝着精细化、实时化、智能化方向全面升级。通过引入无人机测绘、激光雷达扫描等新型测绘技术,实现地理信息的高效、精准采集;搭配云计算、边缘计算技术,搭建地图数据实时更新、快速分发机制,为自动驾驶车辆提供更精准、更及时的地图服务。除此之外,语义地图、三维立体地图等新型地图形式,也将逐步落地应用于自动驾驶领域,为车辆提供更丰富的环境语义信息与三维空间地理数据,进一步提升环境感知能力。5.4 车联网与智能交通系统的深度融合
3S技术将作为核心支撑技术,推动车联网与智能交通系统实现全方位深度融合。通过车与车、车与基础设施之间的实时信息交互、协同作业,实现交通流量智能调控、智慧停车引导、交通事故提前预警等多元化功能,全面提升整体交通系统的运行效率与安全保障水平。例如在车联网生态下,自动驾驶车辆可实时获取周边车辆的行驶状态、全局交通路况信息,完成更高效的跟车、超车、避障操作;同时还能与交通信号灯控制系统联动,实现绿灯最优车速通行,大幅减少停车等待时长,优化道路通行效率。六、结论
3S技术在自动驾驶领域占据着不可替代的重要地位,凭借精准车辆定位、智能路径规划、全方位环境感知三大核心优势,为自动驾驶技术的稳步发展提供了强有力的技术支撑。但现阶段,3S技术在自动驾驶实际应用中仍面临诸多难题,需要在数据处理与传输效率、定位精度与稳定性、地图数据更新维护、系统安全与隐私保护等方面开展更深层次的研究与技术优化。随着科技的持续创新与迭代,3S技术在自动驾驶领域的应用拥有极为广阔的发展前景,未来将持续朝着多源数据深度融合与智能化处理、高精度定位技术升级、地图技术创新突破、车联网与智能交通系统深度融合的方向迈进,为构建安全、高效、全智能的自动驾驶交通体系,筑牢坚实的技术基础。参考文献[1]刘少山,唐洁,吴双,等.第一本无人驾驶技术书[M].北 京: 电子工业出版社,2017: 39-41.[2]( 中通客车控股股份有限公司,山东 聊城 252000)[3]李德仁,洪勇,王密,等.测绘 遥 感 能 为 智 能 驾 驶 做 什 么? [J].测 绘 学 报,2021,50(11):1421-1431.DOI:10.11947/j.AGCS. 2021.20210280.[4] ZHAN W, HU J, WANG J. Research and Design of High Precision 3D Laser Engraving Plate-making System[C]. Proceedings of the 2017 The 5th International Conference on Control,Mechatronics and Automation, 2017 : 73-76.[5] SIMON M, MILZ S, AMENDE K, et al.: Complex-YOLO: An Euler-Region-Proposal forReal-Time 3D Object Detection on Point Clouds: Munich, Germany, September 8-14, 2018,Proceedings, Part I, 2019: 197-209.[6] YANG B, LUO W, URTASUN R. Pixor: Real-time 3d object detection from point clouds[C].Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018 :7652-7660.[7]1.中国科学院微电子研究所,北京100029; 2.江苏物联网研究发展中心,无锡214135; 3.无锡物联网创新中心有限公司,无锡214135.
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。