扒下激光雷达的底裤!自动驾驶的终极逻辑,藏在“不交互”里
- 2026-04-22 16:49:39
扒下激光雷达的底裤!自动驾驶的终极逻辑,藏在“不交互”里不是讲深奥的,是讲谁对、谁错、谁能走到最后。 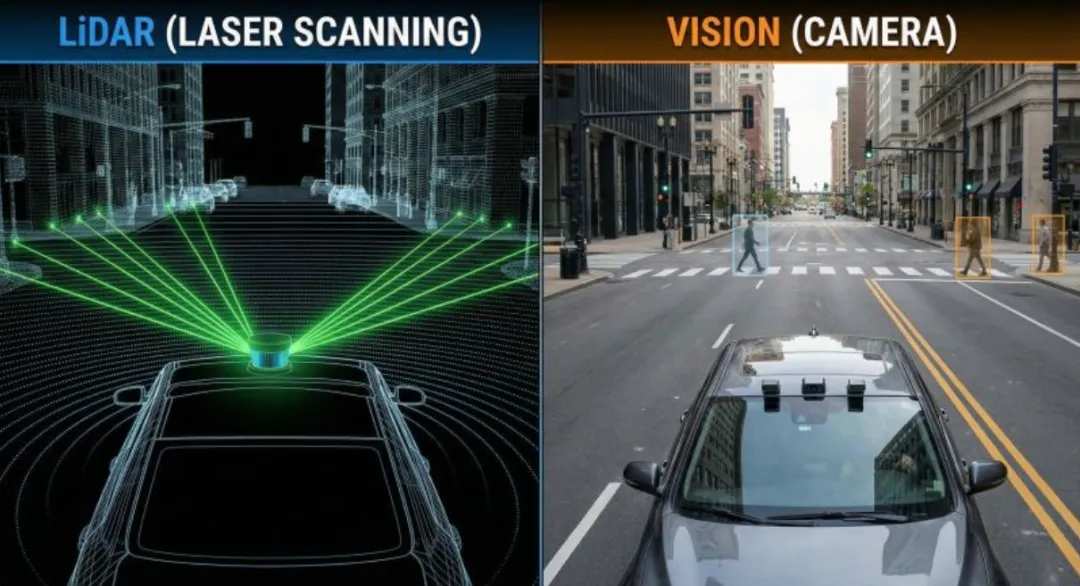
自动驾驶行业里有一个流传极广的错觉:激光雷达装得越多,自动驾驶越安全。 我直接告诉你真相:激光雷达是噪音,不是安全的冗余。 理解这句话,你才算真正看懂自动驾驶。 要懂自动驾驶,先搞懂它的“世界模型”。 不管是什么技术路线的自动驾驶,都要先在虚拟世界里极致训练——沙尘暴、泥石流、火山喷发,越是极端场景,越要反复打磨。 而在这个世界里,自动驾驶的目标,从一开始就极其明确且单一。 它的核心诉求是什么?是从A点安全开到B点,并且在这个过程中,绝不跟任何障碍物发生接触。 车看到的世界,是被一个个方块盖住的。它不需要知道前面是个垃圾桶还是个纸箱,它只需要判断这块空间“能不能过去”。这在技术上叫作“占用网络(Occupancy Network)”。 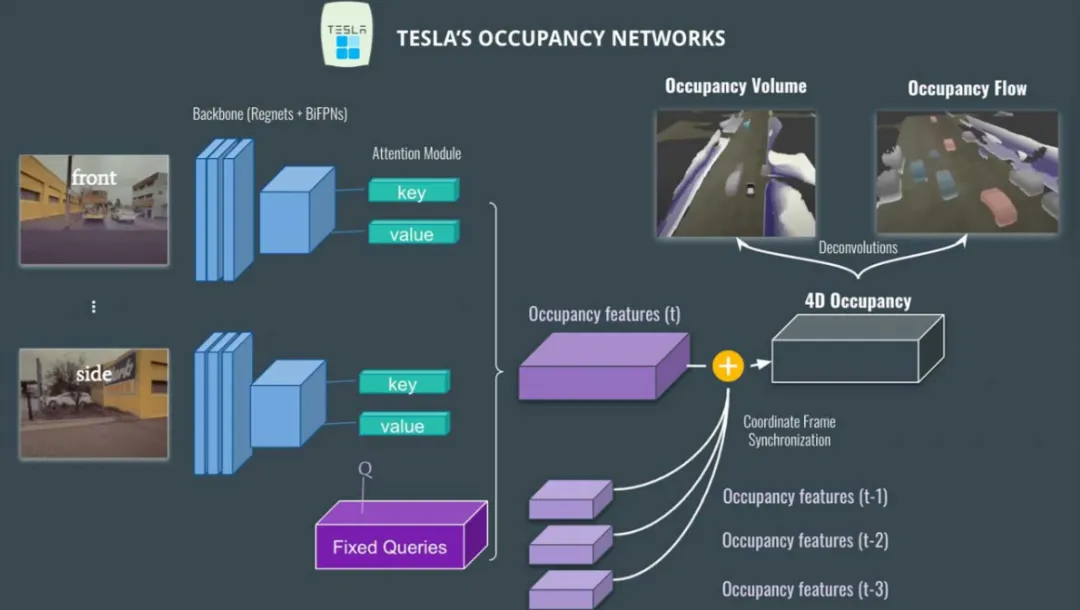
一句话总结:自动驾驶,是一种极度冷酷的“不交互智能”——它不需要理解世界,只需要避开世界里的障碍。 再者来看,所有智能设备的底层逻辑,都绕不开VLA模型(视觉 Vision - 语言 Language - 动作 Action) 靠眼睛感知世界,然后做出物理层面的行动。但感知和行动之间,到底要不要保留“语言”去思考解读? 对自动驾驶来说,答案是极其果断的:直接干掉L,绝对不要。 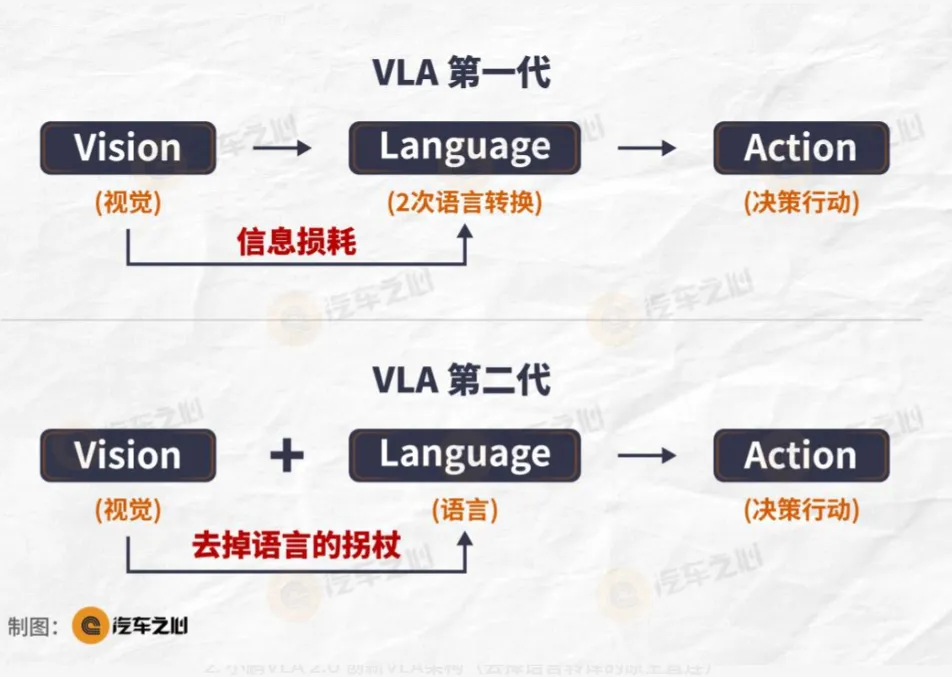
为什么?因为车在高速行驶中,它看到的画面和它做出的动作,必须是极其丝滑、极其连续的。 而人类的语言,是一种离散的、有损的压缩包。如果你让车在看到危险时,还先在脑子里用语言翻译一遍“哎呀前面有个人”,这纯粹是浪费时间。 高级的自动驾驶直接就是V-A 端到端,看到就躲开。 至于出了事故要问责?后台有行车数据记录,事后补一份语言报告就完了。 当我们再拉回激光雷达多模态融合这条路线时,你就知道为什么它不是安全的冗余了。 你强行把激光雷达塞进车里,就等于强行让“视觉看到的画面”和“激光扫描的数据”在脑子里开会商量。 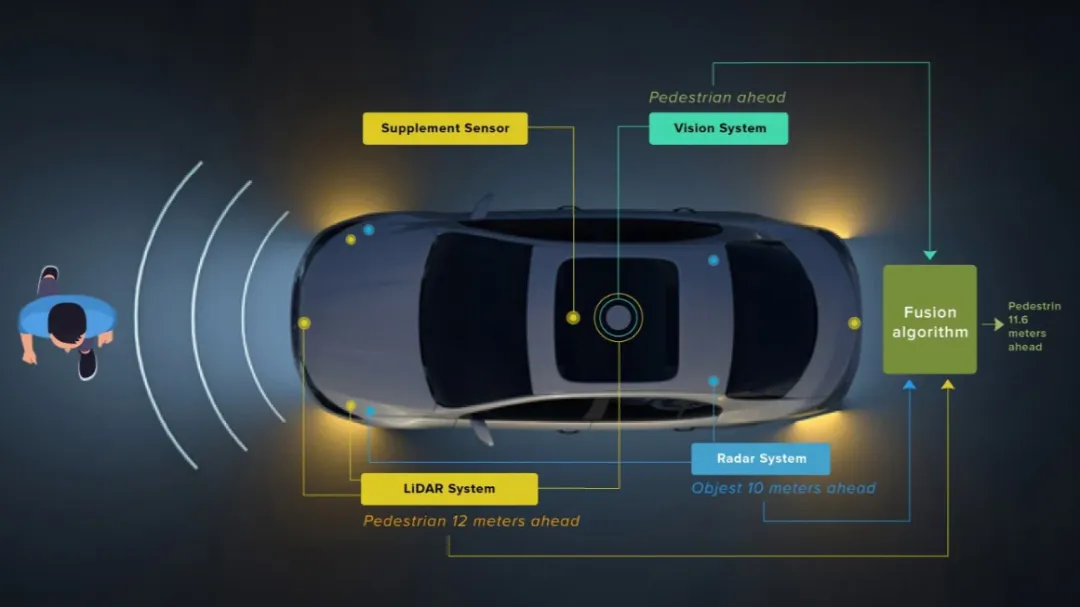
平时没事的时候还好,一旦遇到紧急情况,视觉系统想向左打方向,激光雷达系统觉得该刹车。 反映在现实中,就是系统不知道该听谁的,方向盘左右摇摆,最后彻底失控发生事故。 所以,激光雷达不但没有增加安全性,反而成为了干扰最终决策的“噪音”。 理解了这个本质,你才算真正摸到了自动驾驶的方法论,也才能看懂这个赛道里,谁能走到最后。 我是张亮,带你穿透喧嚣,看懂硬科技背后的商业底牌。 
盯紧美国长滩!商业航天 10 年红利,藏在这 5 家巨头里 深扒自动驾驶两大“死局”:小鹏特斯拉的真正对手,根本不是其他车企
今天我用一套最底层的逻辑,把自动驾驶彻底讲明白。
1 | 占用网络:自动驾驶的“冷酷生存法则”
2 | VLA模型里,自动驾驶果断抛弃的“L”(语言)
3 | 激光雷达的致命伤:抢方向盘的“噪音”
END
觉得内容能帮你,点赞 + 推荐,关注我,做有底气的产业赢家。
往期推荐:
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。

