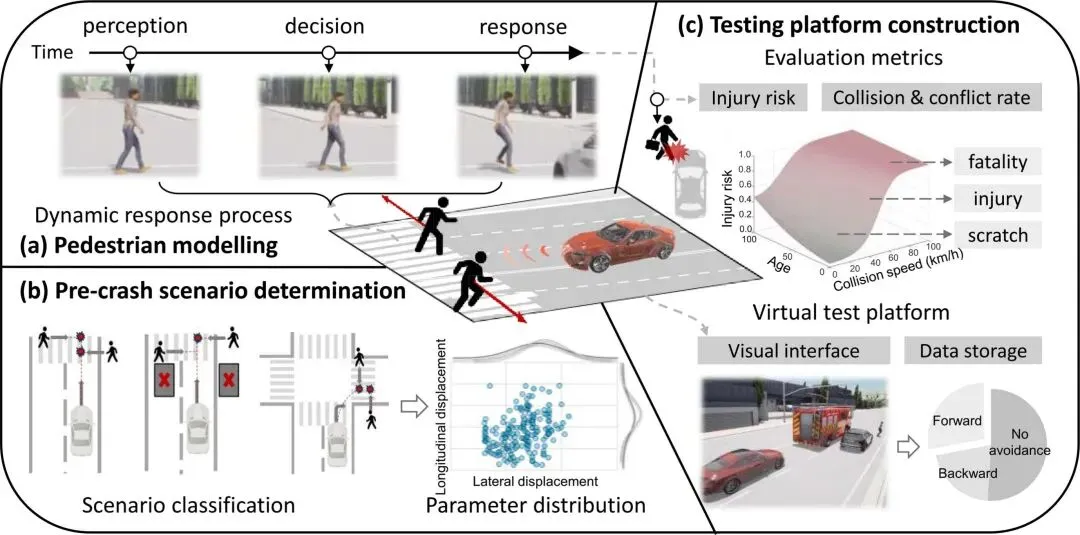
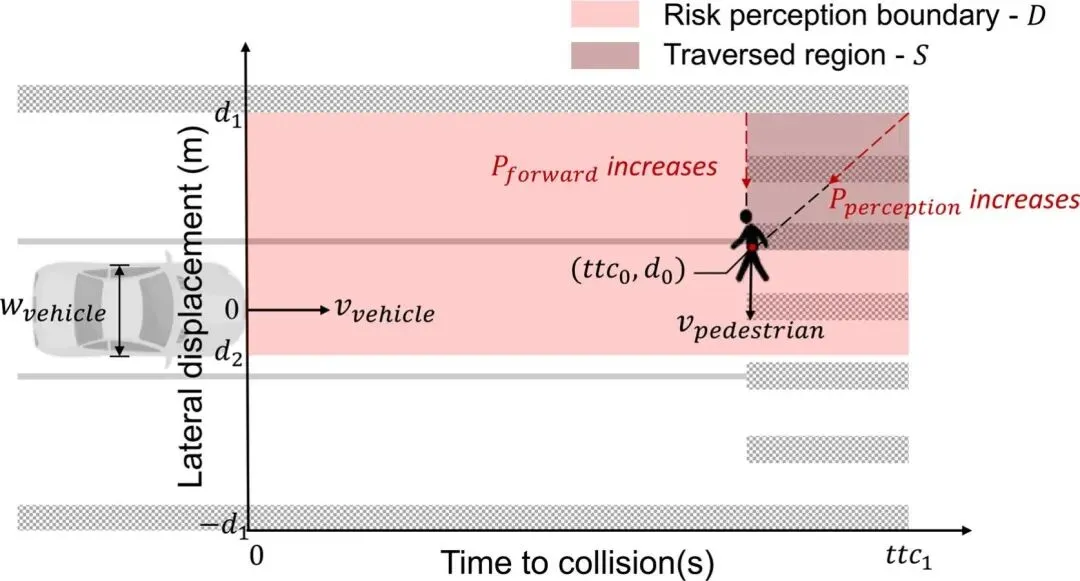
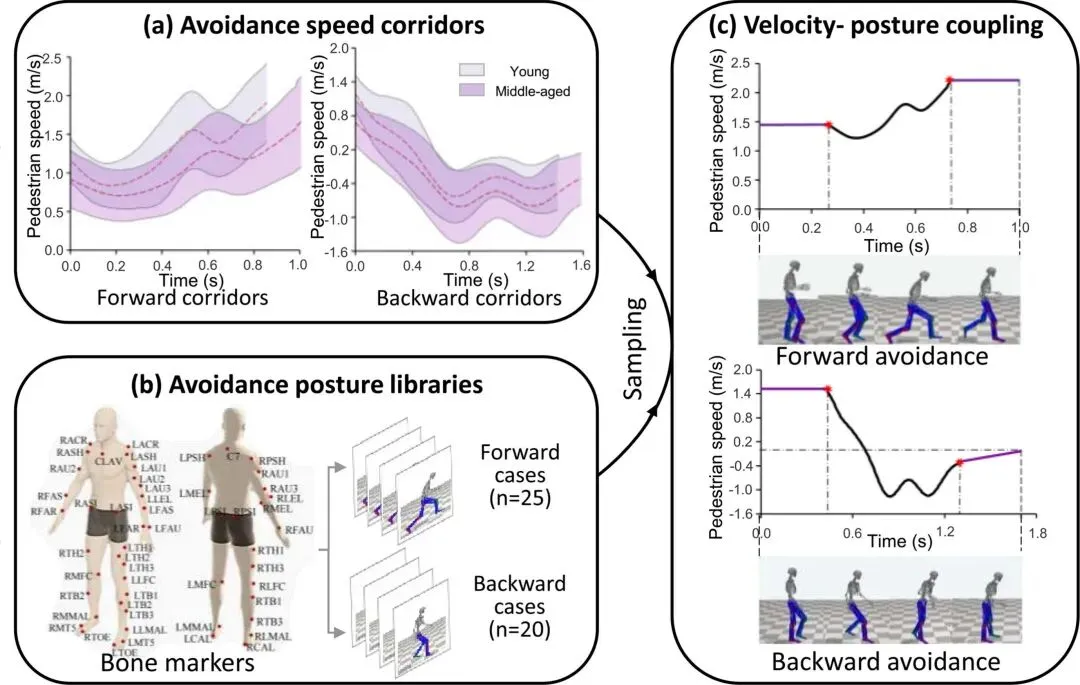
方法部分首先围绕安全关键场景中的行人建模展开:作者基于既有虚拟现实(VR)实验平台采集志愿者过街时的真实行为数据,将行人在危险来车交互中的行为过程划分为“风险感知—避让决策—动作执行”三个阶段,并记录速度、姿态、人与车的相对位置以及关键行为时刻。在建模层面,作者以车辆路径上的 TTC 与行人相对横向位移 d 构建时空坐标系,采用双变量正态分布拟合“首次感知来车”与“启动前向避让”两个行为节点,再通过概率密度积分得到累积概率,并用个体化阈值触发行人的风险感知与前/后向避让决策;图2展示了该时空坐标系及行人风险感知区域的定义。在运动学响应部分,作者利用不同年龄组的避让速度走廊和包含完整 54 关节时序轨迹的姿态库,分别生成避让速度与避让动作,再对二者进行时序同步,从而形成具有年龄差异和动作连续性的运动学响应模型,图3给出了速度走廊、姿态库以及速度-姿态耦合的构建示意。随后,该模型被嵌入 CARLA 自动驾驶仿真器中,在非紧急状态下保持恒速,在危险交互时按“感知—决策—执行”逻辑逐帧更新行人的位置和骨骼动画,并通过真实世界行人碰撞视频统计数据以及 12 个近碰案例轨迹对模型真实性进行验证。
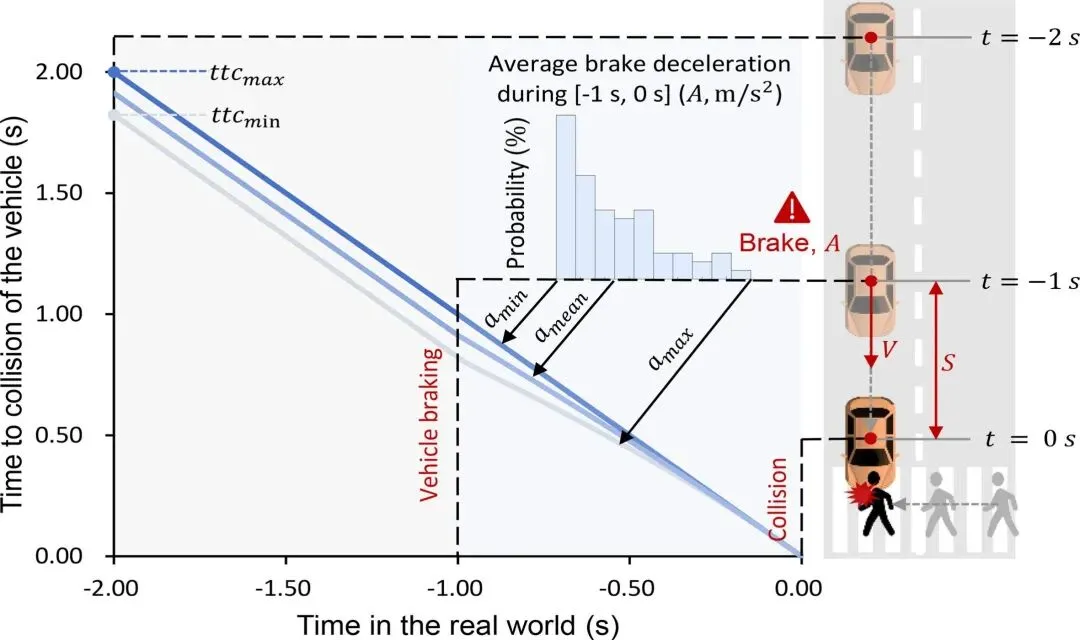
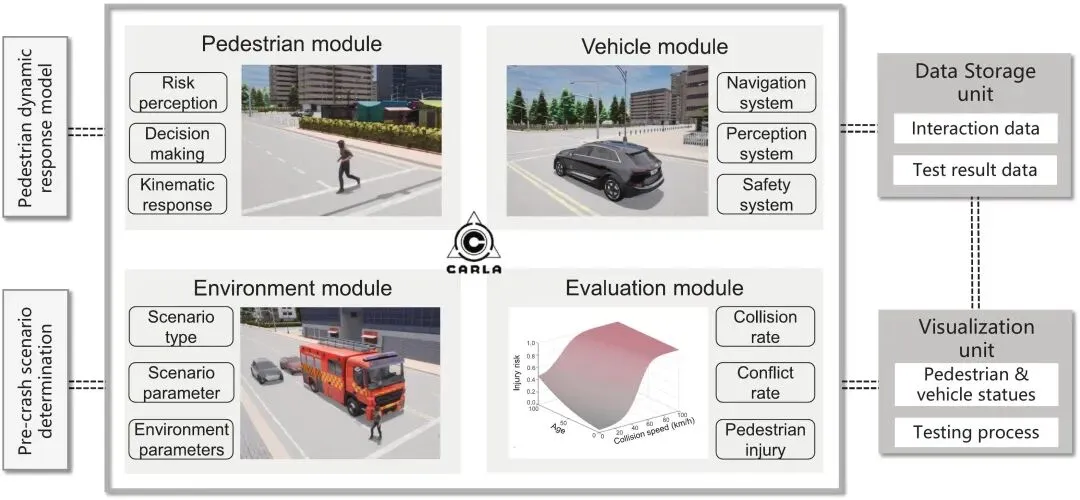
在场景生成方面,作者基于真实事故数据筛选出与过街行为最相关的三类高频车-行人冲突场景,从 GIDAS、CIDAS 和 FASS 三个数据库中整理了 180 起真实碰撞案例,提取 t=-1 s 时刻的相对位置、制动减速度和碰撞速度分布,并进一步回推 t=-2 s 的初始相对位置与初始速度分布;图4说明了不同制动减速度下 TTC 演化的差异。最后,作者在 CARLA 中搭建了整合行人模块、车辆模块、环境模块和评估模块的虚拟测试平台,将碰撞率、冲突率以及行人伤害风险共同纳入评价体系,图5展示了平台总体架构,并以不同 TTC 触发阈值的 AEB 系统作为示例开展平台测试。
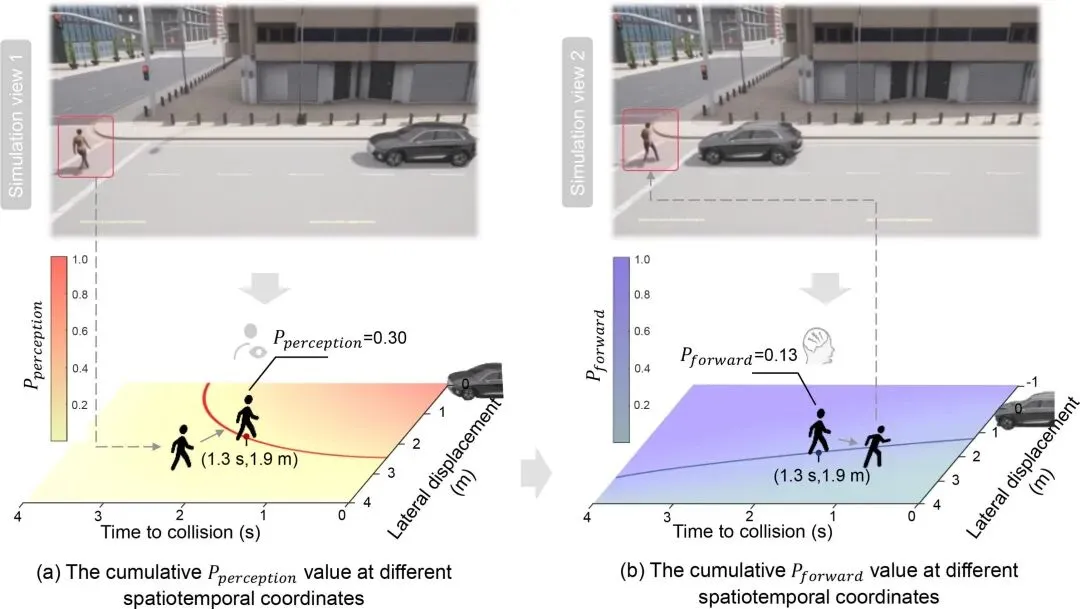
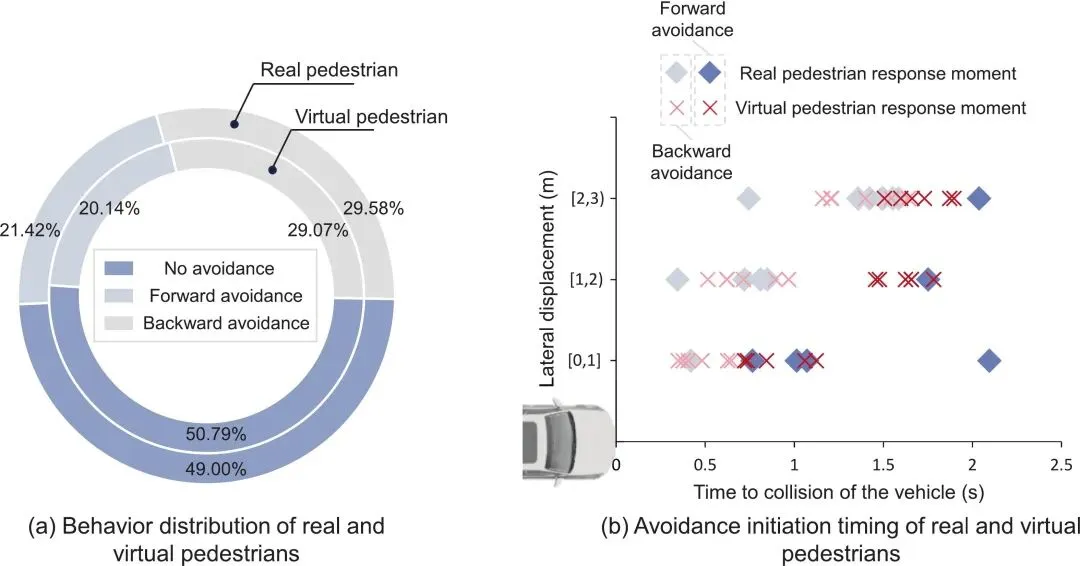
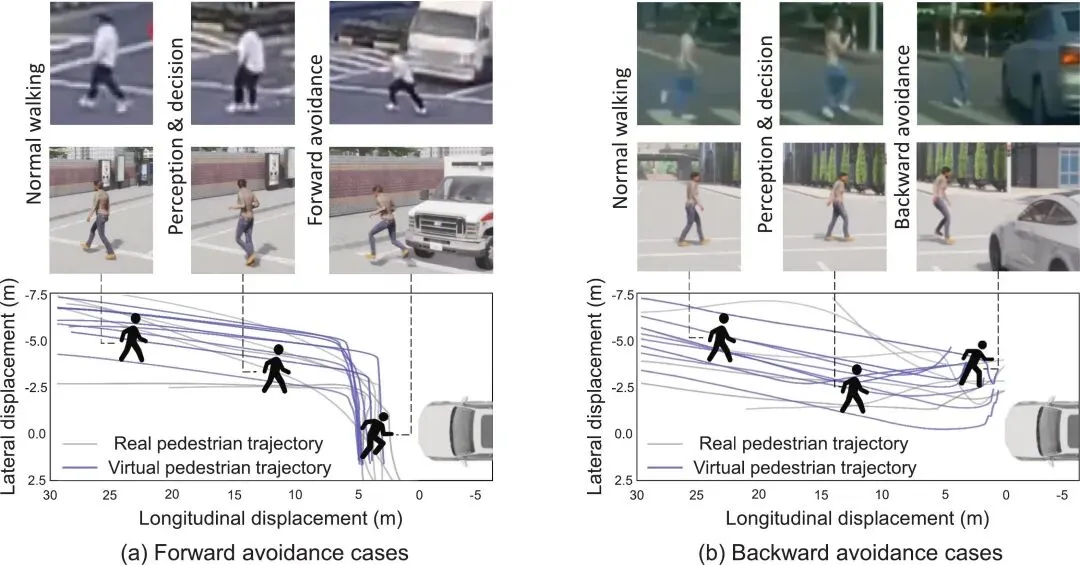
作者首先完成了高保真行人模型在 CARLA 中的实现。基于 17 组 VR 实验案例建立的风险感知模型和避让决策模型,使虚拟行人能够依据与来车之间的时空关系自主判断风险并做出类人的前向或后向避让;同时,结合速度走廊与姿态库得到的运动学响应模型,又保证了虚拟行人在避让时的速度变化和肢体动作与真实行人的运动特征一致。图6直观展示了这一过程:图6(a)给出了行人在不同时空坐标下的累积风险感知概率,随着 ttc_vehicle 与横向位移 d 的减小,行人与车辆逐渐逼近潜在碰撞点,场景紧迫性上升,行人感知来车风险的概率也不断提高;图6(b)则显示了行人在不同坐标下采取前向避让的概率分布,表明当行人更接近从车前通过的位置或整体碰撞风险相对较低时,更倾向于前向加速通过,而在继续前行被判断为过于危险时,则后向避让成为主导策略。作者还给出了一个具体示例:当虚拟行人的阈值设为 θ_perception=0.30、θ_forward=0.50 时,其在 (ttc=1.3 s, d=1.9 m) 处触发风险感知,并因 P_forward 低于阈值而选择后向避让。进一步对 4200 次模拟车-行人冲突进行统计发现,49.21% 的虚拟行人会感知来车并主动避让,其中 40.93% 选择前向避让、59.07% 选择后向避让,这与真实世界统计中约 51.00% 的避让率、以及避让者中 42.00% 前向、58.00% 后向的分布高度接近(图7(a))。此外,图7(b)表明,在不同横向距离条件下,虚拟行人的避让启动时机(以车辆 TTC 衡量)与真实行人的分布保持一致;图8进一步展示了虚拟行人与真实行人在前向和后向避让轨迹及姿态上的良好吻合,说明该模型能够较真实地再现危险车-行人交互中的动态行为过程。
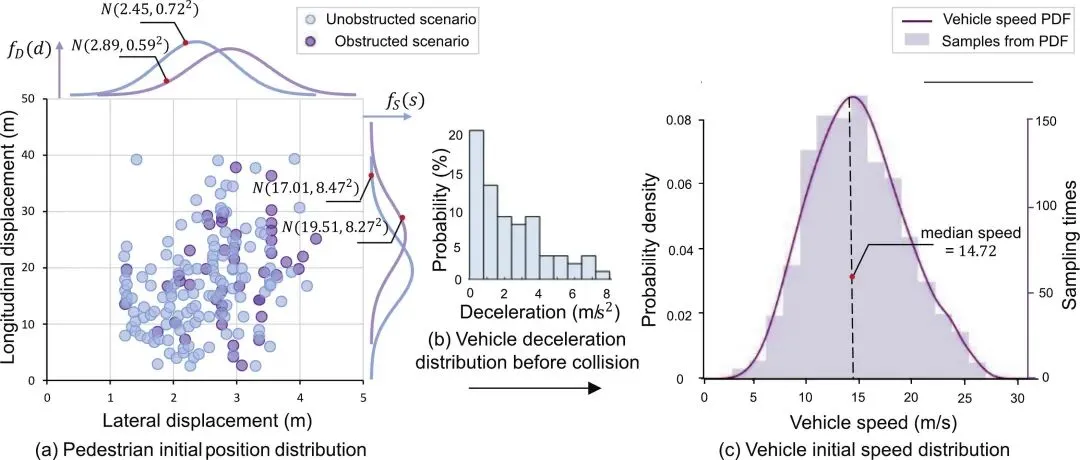
在碰撞前测试场景确定方面,作者将碰撞前 2 s 视为安全关键情境演化的核心时间窗,并将 t=-2 s 设定为测试场景的初始时刻。通过对 180 起真实车-行人碰撞案例的分析,作者发现遮挡场景与无遮挡场景在初始相对位置分布上存在明显差异:遮挡情形下,行人与车辆之间通常具有更大的横向和纵向距离,这与遮挡导致双方感知延迟、车辆减速不及时、行人继续横穿从而保持较高相对速度有关。图9(a)展示了 t=-2 s 时车-行人初始相对位置的散点分布与核密度估计结果,数据点沿对角线聚集,表明横向位移与纵向位移之间存在正相关关系;作者进一步验证其可近似服从双变量正态分布,从而为后续场景采样提供了统计基础。与此同时,图9(b)显示,在碰撞前最后 1 s 内,近 80% 的车辆制动减速度低于 4.0 m/s²,反映了人类驾驶员在紧急避撞能力上的局限。基于纵向距离分布与制动减速度分布,作者推导得到了 t=-2 s 时刻车辆初始速度的概率分布,图9(c)表明该速度分布呈右偏特征,其中中位数为 52.99 km/h、四分位距为 22.25 km/h;同时,约 75% 的车辆在碰撞前 2 s 的速度高于 42.18 km/h,只有 6.13% 低于 30 km/h。通过从这些统计分布中随机采样,作者建立了既能体现真实事故紧迫性、又保留场景多样性的碰撞前测试场景参数体系。
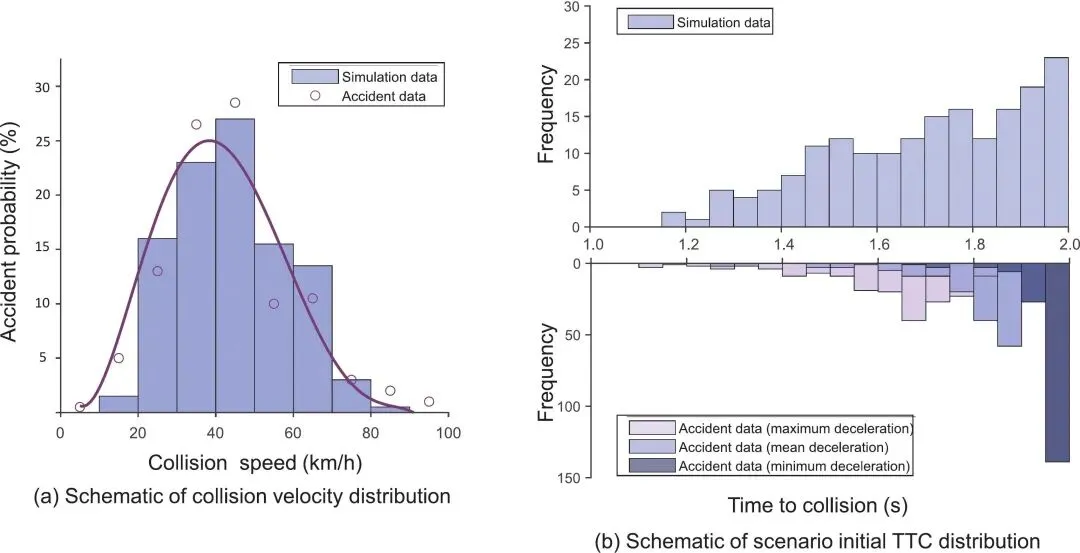
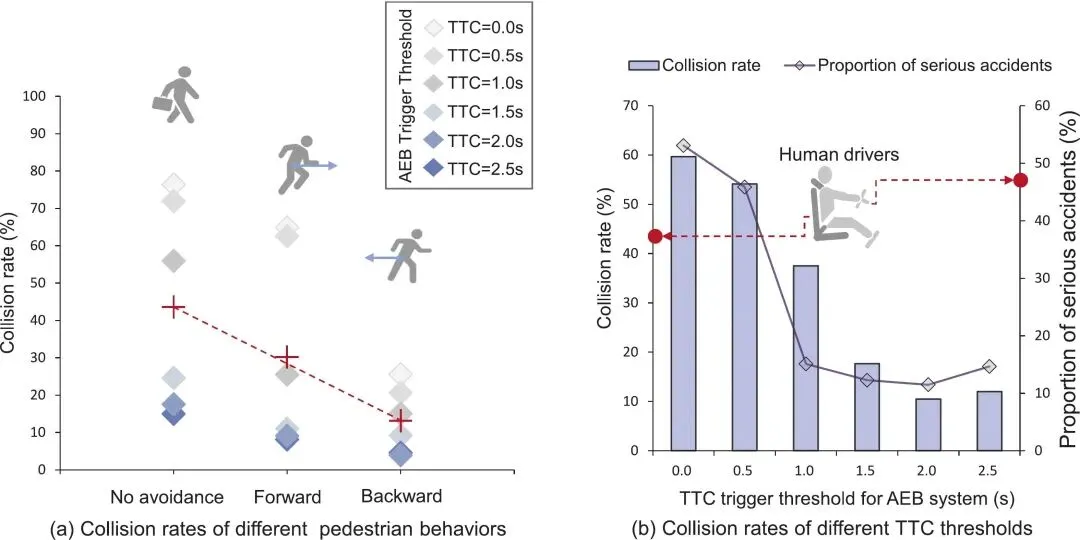
在虚拟测试平台仿真结果中,作者进一步验证了平台本身的真实性与应用价值。平台能够同步记录两类关键数据:一类是从行人生成到交互结束的完整车-行人交互数据,包括车辆动态参数、系统状态以及行人的运动学参数、风险感知状态和避让决策状态;另一类是面向系统评价的测试结果数据,包括碰撞速度、碰撞位置和碰撞瞬间的行人姿态等。图10(a)表明,采用人类驾驶员基线组在平台中得到的碰撞速度分布(μ_sim=44.70±14.14 km/h)与真实事故统计(μ_real=43.35±16.31 km/h)在均值和离散程度上都高度一致;图10(b)则表明,平台生成场景在 t=-2 s 时的初始 TTC 分布与真实事故在不同制动工况下回推得到的 TTC 分布吻合良好,说明场景紧迫性被合理保留。更重要的是,图11(a)揭示了行人动态行为对碰撞风险的显著影响:若行人不采取避让,平均碰撞率为 43.53%;采取前向避让时降至 30.18%,而采取后向避让时可进一步降至 13.15%,说明在虚拟测试中纳入行人动态行为模型是必要的。对于 AEB 系统,图11(b)显示,随着 TTC 触发阈值不断增大,碰撞率和严重伤害占比持续下降,并在 ttc_trigger≥2.0 s 时基本稳定在约 10% 的碰撞率和 12% 的严重伤害比例。与仅依赖人类驾驶员干预的基线组相比,当 ttc_trigger=2.0 s 时,AEB 可使行人碰撞减少 32.84%,严重伤害概率降低 35.38%。不过,作者也指出系统的困难场景主要集中在遮挡情形中,因为车辆侧传感器往往无法及时发现行人,这揭示了依赖车辆感知的 AEB 架构在部分可见冲突中的性能边界,并提示后续需要引入更强的传感融合策略来进一步降低残余风险。