当人们畅想未来自动驾驶汽车穿行于城市与乡村之间的场景时,往往将目光聚焦在车辆本身的传感器——激光雷达、摄像头、毫米波雷达——以及驱动它们的人工智能算法上。然而,鲜为人知的是,在这些看得见的技术背后,有一张看不见的“隐形轨道”默默支撑着自动驾驶的安全与可靠,那就是高精地图。与普通导航地图不同,高精地图并非只是给人看的带路工具,而是为机器设计的、包含海量精确几何与语义信息的道路环境模型。它像一条无形的铁轨,将自动驾驶车辆牢牢约束在正确的行驶轨迹上,并提前告知前方可能出现的所有道路特征与规则约束。
普通导航地图的精度通常在米级,足以满足人类驾驶员的寻路需求,但对于需要厘米级定位的自动驾驶系统来说,远远不够。一辆以每小时六十公里速度行驶的汽车,一秒钟就要驶过将近十七米,如果定位误差达到一米,就可能造成车道偏离甚至碰撞事故。高精地图的绝对精度要求通常在十到二十厘米以内,相对精度(即地图上两点间的相对位置误差)甚至要求达到厘米级。如此严苛的精度要求,使得高精地图的制作无法依赖传统测绘手段,而必须采用前面提到的移动测绘系统、无人机激光雷达、高精度定位定姿等前沿技术进行数据采集。
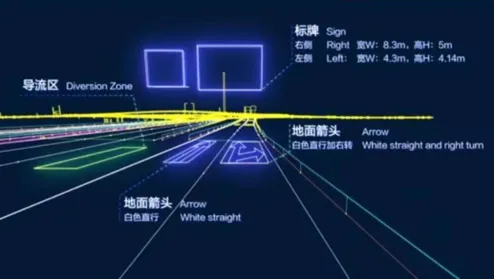
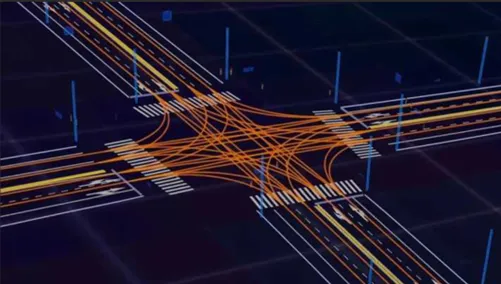
高精地图包含的信息维度远超普通地图。普通地图主要关注道路的拓扑连接关系(哪里能走、哪里能拐弯)以及兴趣点的位置,而高精地图则需要详细描述道路的每一个几何和语义特征。几何层面,它要精确记录车道线的位置、类型(实线、虚线、双黄线、导流线)、颜色,路缘石的高度和轮廓,护栏、隔离墩、防撞桶等安全设施的坐标,以及道路表面的坡度、曲率、超高。语义层面,它要标注每个车道的功能属性(直行、左转、右转、掉头、公交专用、可变导向)、限速值、限高限宽、交通标志牌的内容和位置(包括标志牌正面的文字和图案)、信号灯杆和灯头的三维坐标及相位关系(哪个灯头控制哪条车道)。更为高级的高精地图还会包含动态信息层,如实时路况、临时施工、天气影响、事故黑点等,这些信息需要与云端保持同步更新。
高精地图在自动驾驶系统中扮演着多重角色。最基础的角色是定位增强。自动驾驶车辆虽然搭载了GPS、惯导和激光雷达,但在高楼遮挡、隧道、恶劣天气等场景下,定位精度可能下降。高精地图提供了一个先验的环境特征库,车辆可以实时扫描周围环境,提取路标、灯杆、地面标志等特征,与地图中的特征进行匹配,从而反推出自己的精确位置,这种方法称为地图匹配定位。在GPS失效的情况下,仅靠高精地图和激光雷达或视觉的匹配,就能实现厘米级的定位精度。第二个角色是感知补充。车辆的传感器探测距离有限,且容易受到遮挡。高精地图则像一个超级长焦镜头,能够提前告知车辆前方数百米外存在哪些静态物体——一个隐藏在弯道后方的交通标志,一座被大树遮挡的桥梁限高牌,一个位于坡顶后方的红绿灯。这使得车辆能够提前规划速度、变更车道或准备刹车,大大提升了行驶的安全性和舒适性。第三个角色是行为决策与路径规划的约束条件。自动驾驶不仅要找到从A到B的路径,还要在这条路径上做出无数个微观决策:何时变道、在哪个点开始减速、以多快的速度通过弯道。高精地图提供的车道级几何、曲率、坡度、摩擦系数等信息,是这些决策的基础输入。
高精地图的制作和维护是一项浩大的工程。首先需要利用移动测绘系统采集原始点云和影像数据,经过后处理生成高精度三维地图。但这仅仅是第一步,接下来需要将点云数据转化为可供自动驾驶系统读取的结构化地图格式,通常包括车道模型、定位图层、语义图层等。这一过程涉及大量的人工标注和自动处理,例如,自动识别车道线类型、自动提取交通标志牌的内容、自动建立信号灯与车道的对应关系。由于道路环境不断变化——施工改道、重新划线、新设标志——高精地图必须保持高频更新。传统的一年一更新的频率远远不够,理想状态下应该是天级甚至小时级更新。为此,业界发展出了众包更新模式,利用每一辆在路上行驶的量产自动驾驶汽车或辅助驾驶汽车作为移动传感器,将其感知到的道路变化(如新划的标线、临时路障)加密上传至云端,经过验证后快速融合到高精地图中。
当前,高精地图的行业格局正处于激烈竞争和快速演进之中。各大图商、自动驾驶公司、车企都在建立自己的高精地图生产与更新体系。中国的自然资源部门对高精地图的测绘资质、数据保密、审图号等有严格监管,这也使得高精地图成为自动驾驶产业链中准入门槛极高的环节。未来,随着自动驾驶等级从L2、L3向L4、L5迈进,高精地图的精度、覆盖范围、更新频率和功能丰富度将不断提升。同时,车路协同技术的发展,使得路侧基础设施也能够实时感知并广播道路环境变化,与高精地图形成互补。可以预见,高精地图将不再是一张静态的底图,而是一个动态的、可交互的、与车辆实时联动的智能道路环境模型,它和车辆自身传感器一起,共同编织起自动驾驶的安全网。这张隐形的轨道,终将引领人类驶向更加安全、高效、舒适的出行未来。



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
