自动驾驶的 "眼睛":摄像头、毫米波雷达、激光雷达,到底谁更靠谱?
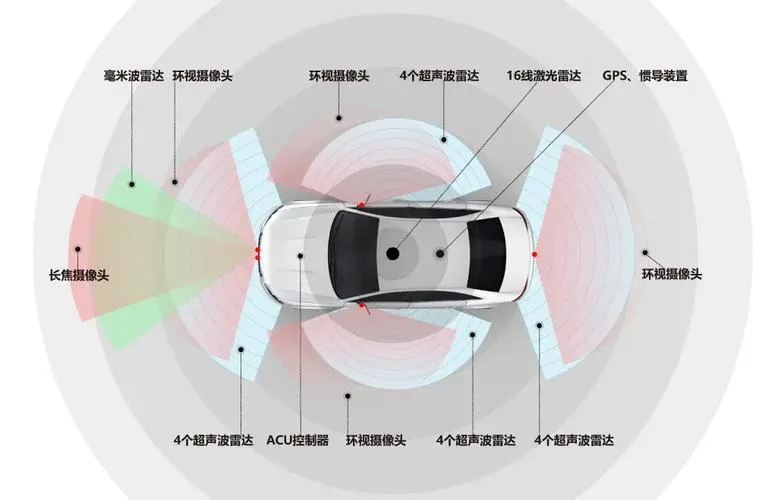
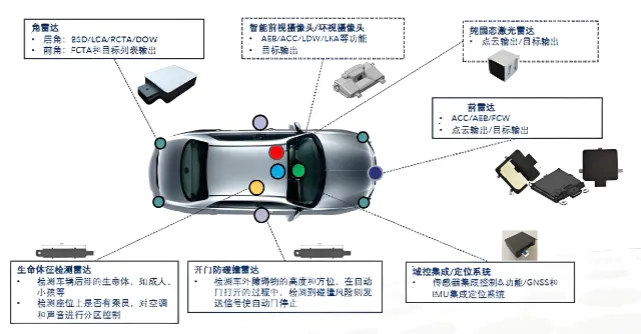
在自动驾驶技术的发展历程中,传感器技术的演进一直是决定车辆 "看" 世界能力的关键因素。从早期简单的摄像头到如今复杂的多传感器融合系统,每一次技术突破都在重塑我们对智能驾驶的认知。然而,在这个技术快速迭代的时代,一个根本性问题始终困扰着行业:摄像头、毫米波雷达、激光雷达,这三大传感器究竟谁更靠谱?这个问题的答案并非简单的非此即彼。2026 年的今天,随着特斯拉纯视觉方案与国内多传感器融合方案的激烈交锋,随着固态激光雷达成本的断崖式下跌,随着 4D 毫米波雷达技术的突破性进展,我们需要用更加理性和全面的视角来审视这场 "传感器战争" 的本质。一、三大传感器的技术原理解析
1.1 摄像头
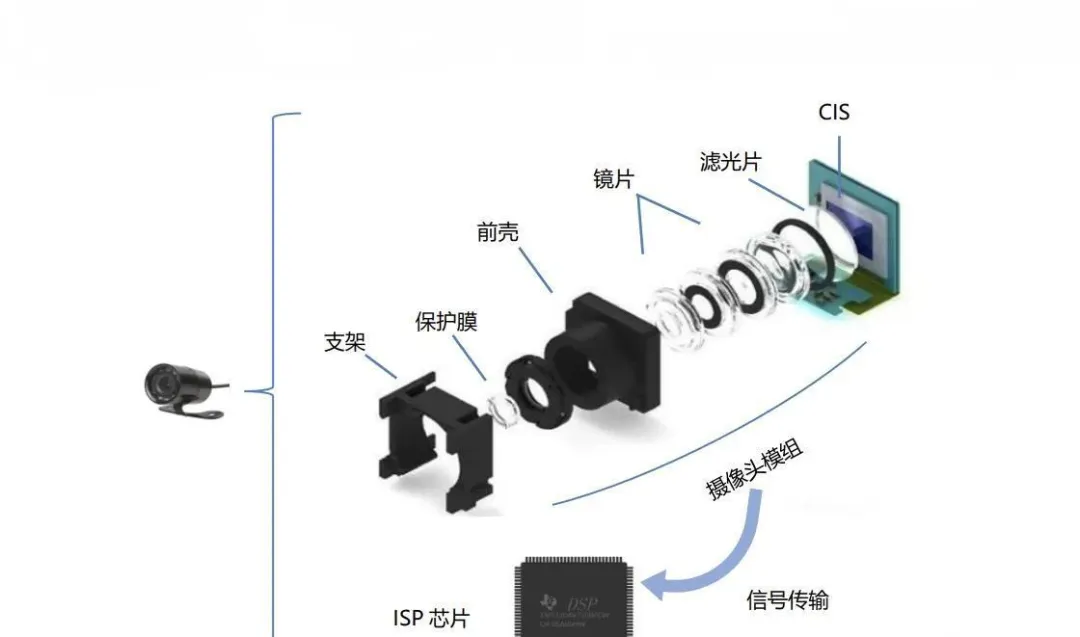
摄像头作为自动驾驶系统中最接近人类视觉的传感器,其工作原理基于光学成像和光电转换两个核心过程。光线首先进入镜头,通过焦距决定视场角,利用光圈控制进光量,再通过非球面透镜或镀膜技术减少畸变和色散。随后,光线穿过红外截止滤光片阻挡红外光干扰,最终聚焦到图像传感器上。在光电转换阶段,目前主流的传感器类型有两种:CCD和 CMOS。CCD 采用电荷逐行转移的方式,光子撞击硅基光电二极管产生电子 - 空穴对,电子被势阱捕获形成电荷包,电荷量与光强成正比。CMOS 则是每个像素独立读出,同为光电二极管转换光子为电子,但每个像素内置放大器,可直接将电荷转换为电压信号。摄像头的核心优势在于其强大的语义识别能力。它是唯一能够识别颜色、文字、交通标志等语义信息的传感器,能够区分红绿灯状态、读懂路牌文字、识别不同物体类别。在 800 万像素配置下,前视摄像头最远可探测 250-300 米,普通 200 万像素约 150 米。然而,摄像头的致命短板同样明显。作为被动光学传感器,它完全依赖环境光照,在强逆光、暴雨、浓雾等低能见度环境下性能急剧下降甚至完全失效。更重要的是,摄像头的测距能力依赖于算法估算,单目摄像头需要通过复杂的算法来推断距离,双目则依赖视差计算,在复杂环境下容易失效。1.2 毫米波雷达
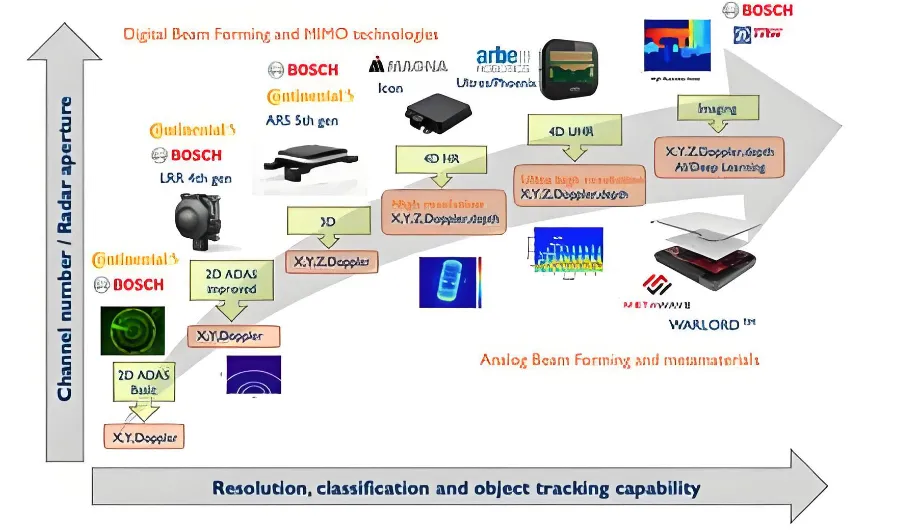
毫米波雷达的工作原理基于电磁波反射和多普勒效应。它发射 30GHz 至 300GHz 之间的毫米波电磁信号,利用调频连续波(FMCW)技术,通过测量发射与回波之间的频率差计算距离,结合多普勒效应精确测速。FMCW 技术的核心在于通过线性调频发射信号,利用回波信号与发射信号的频率差来计算目标的距离和速度。整个工作过程可拆解为 "发射 - 接收 - 处理 - 输出" 四步,全程在毫秒级完成,保障实时感知。通过多发射 / 接收天线组成的虚拟阵列,利用相位干涉原理,可精确计算目标角度。毫米波雷达的最大优势在于其全天候工作能力。其波长为毫米级,远大于雨滴,遵循瑞利散射规律,能够轻松穿透雨雾,几乎不受天气影响。在 76-81GHz 频段工作时,毫米波能够部分穿透雨、雾和雪,即使在暴雨天气下仍能保持 200 米以上的有效探测距离。此外,毫米波雷达还具有直接测速能力,这是摄像头无法实现的功能。它能够通过多普勒频移直接测量目标的径向速度,测距精度可达 ±0.1-0.5 米,测速精度 ±0.1m/s。在探测距离方面,24GHz 雷达覆盖 50-80 米,77GHz 雷达可达 200-300 米,最新的 94GHz 雷达甚至可达 1200 米。但毫米波雷达也存在明显的局限性。首先是分辨率较低,常规雷达的角分辨率为 3°-5°,虽然 4D 成像雷达可提升至 0.5° 以内,但仍无法与激光雷达相比。其次是缺乏语义识别能力,无法区分目标类型,对静止和横向移动的物体不敏感,成像模糊,难以区分路面纹理和障碍物。1.3 激光雷达
激光雷达采用 ** 飞行时间法(ToF)** 进行测距,其核心原理是发射激光脉冲并精确测量回波时间。激光器发出高频率、短脉冲的激光束,波长常为 905nm 或 1550nm(后者对人眼更安全),脉冲持续时间极短(纳秒级),确保高距离分辨率。激光雷达的工作过程可以简单描述为:激光脉冲以 30 万公里 / 秒的速度射出,碰到障碍物后反射回来,系统用高精度计时器记录下这个 "飞行时间",根据公式距离 = (光速 × 时间)/2计算目标距离。每秒发射数十万至数百万束激光,形成海量测距点,称为点云(Point Cloud)。机械式激光雷达通过机械旋转部件实现 360° 扫描,水平视场角通常为 360°,垂直视场角约 30°-40°。其优势在于光路成熟、360° 全景视场、远距感知能力强,但劣势是机械易疲劳、寿命短、成本高、良率低。混合固态激光雷达采用转镜式或 MEMS 微振镜式设计,用局部微动替代全局旋转,寿命超过 5 万小时,满足车规级可靠性要求。这种方案大幅削减了机械磨损,具有可靠性强、体积小、成本可控等优势,率先跑通车规量产闭环。纯固态激光雷达完全取消机械运动部件,通过电子或光学原理实现扫描。其激光发射通道数量可达上万个,比半固态激光雷达多十倍以上,可以直接把发射通道做成一整面,形成面阵,省去了扫描成面的步骤。激光雷达的核心优势在于其厘米级的高精度三维感知能力。测距精度可达 ±2-5cm,三维定位精度极高,远超毫米波雷达。在 10% 反射率下,常规探测距离为 150-250 米,高端远距款可达 300 米,1550nm 波长款穿透性更强、距离更远。更重要的是,激光雷达不受光照影响,能够生成高分辨率的 3D 点云,精确还原物体的三维几何结构。然而,激光雷达也面临着显著的技术挑战。首先是成本问题,尽管近年来成本大幅下降,但相比摄像头和毫米波雷达仍处于较高水平。其次是天气适应性,激光波长与雨滴大小接近,在暴雨中会发生米氏散射,导致探测能力大幅下降。此外,激光雷达还存在无法穿透玻璃、对黑色低反射物体识别困难等问题。二、性能表现的多维度对比
2.1 成本对比
成本一直是影响传感器普及的关键因素。2026 年的今天,三大传感器的成本格局已经发生了翻天覆地的变化:传感器类型 | 2023 年成本 | 2025 年成本 | 2026 年成本 | 成本降幅 |
摄像头 | 50-100 元 / 个 | 50-100 元 / 个 | 50-100 元 / 个 | - |
毫米波雷达 | 300-800 元 / 个 | 200-500 元 / 个 | 350-500 元 / 个 | 约 50% |
激光雷达 | 2000-3000 元 / 个 | 1450-2000 元 / 个 | 900-1500 元 / 个 | 约 60% |
摄像头作为最成熟的技术,成本已经稳定在极低水平,单个摄像头成本仅为 50-100 元,整车装配不超过 1000 元。这种成本优势使得摄像头成为所有自动驾驶方案的基础配置。毫米波雷达的成本也在持续下降。2026 年,国产毫米波雷达芯片的成熟推动价格下探,单颗 77GHz 雷达成本已降至 50 美元(约 360 元)以下。特斯拉纯视觉方案的硬件成本约为 500-800 美元(约 3600-5800 元人民币),其中主要就是 8 个摄像头的成本。激光雷达的成本下降最为显著,堪称 "断崖式下跌"。2023 年,一颗 64 线激光雷达的价格还在 4 万元左右,而到了 2026 年,主流 192 线激光雷达的报价已经降至 1450 元到 4000 元不等。禾赛科技通过技术迭代,甚至将激光雷达的成本从最初的 20 万美元降至 200 美元(约 1450 元),累计降幅达到惊人的 99.5%。比亚迪通过自研自产,更是将激光雷达成本压至 900 元左右。从整体系统成本来看,根据高工智能汽车研究院预测,到 2026 年,L2 + 级自动驾驶系统的传感器总成本将从 2023 年的约 1500 美元降至 800-1000 美元,其中激光雷达占比从 40% 降至 25%,毫米波雷达与摄像头占比分别稳定在 30% 与 35%。2.2 环境适应性对比
环境适应性是衡量传感器可靠性的重要指标,特别是在极端天气条件下的表现:天气条件 | 摄像头表现 | 毫米波雷达表现 | 激光雷达表现 |
晴天 | 优秀(100%) | 优秀(100%) | 优秀(100%) |
中雨 | 较差(30%) | 优秀(95%) | 一般(65%) |
暴雨 | 极差(<10%) | 良好(80%) | 较差(30%) |
浓雾(能见度 50m) | 极差(<5%) | 优秀(90%) | 很差(20%) |
夜间 | 一般(50%) | 优秀(100%) | 优秀(100%) |
逆光 | 很差(20%) | 优秀(100%) | 优秀(100%) |
摄像头在理想条件下表现优异,但在恶劣天气下性能急剧下降。在暴雨天气下,摄像头因光散射导致对比度骤降与目标丢失,探测能力几乎完全丧失。在浓雾环境中,摄像头的表现同样糟糕,基本无法正常工作。夜间和逆光条件下,摄像头的性能也会大幅下降。毫米波雷达展现出了卓越的全天候性能。在中雨条件下仍能保持 95% 的探测能力,暴雨天气下探测距离缩短约 20%,但仍能保持 80% 的性能。在浓雾环境中(能见度 50 米),毫米波雷达仍能保持 90% 的探测能力,基本不受影响。这种 "天气豁免" 特性源于毫米波的特殊物理性质 —— 波长在 1-10 毫米之间的电磁波能够穿透雨滴、雾气和尘埃等微粒。激光雷达的天气适应性介于摄像头和毫米波雷达之间。在中雨条件下,激光雷达的探测能力下降至 65% 左右;暴雨天气下,由于激光波长与雨滴大小接近,会发生米氏散射,导致探测能力大幅下降至 30%。在浓雾环境中,激光雷达的表现也较差,探测能力仅为 20% 左右。但值得注意的是,高密度激光点云仍能穿透部分雾气,清晰地 "画" 出异物的轮廓和高度。2.3 探测性能对比
性能指标 | 摄像头 | 毫米波雷达 | 激光雷达 |
探测距离 | 80-300 米 | 50-1200 米 | 100-300 米 |
测距精度 | 低(依赖算法) | 中(±0.1-0.5 米) | 高(±2-5 厘米) |
测速精度 | 无 | 高(±0.1m/s) | 中(±0.5m/s) |
角分辨率 | 高(0.1°-0.5°) | 低(2°-10°) | 高(0.05°-0.3°) |
点云密度 | 2D 图像 | 稀疏点云 | 稠密点云 |
语义识别 | 优秀 | 无 | 一般 |
摄像头的探测距离取决于像素配置,800 万像素前视摄像头最远可探测 250-300 米,但测距精度较低,完全依赖算法估算。其优势在于高角分辨率(0.1°-0.5°)和强大的语义识别能力。毫米波雷达在探测距离方面表现突出,特别是 94GHz 雷达可达 1200 米的超远距离探测。其测距精度为 ±0.1-0.5 米,测速精度高达 ±0.1m/s,具有优秀的动态测量稳定性。但角分辨率较低,常规雷达为 2°-10°,限制了其对相邻目标的区分能力。激光雷达在精度方面具有压倒性优势,测距精度可达 ±2-5 厘米,角分辨率为 0.05°-0.3°,能够生成稠密的 3D 点云。在 10% 反射率下,常规探测距离为 150-250 米,高端产品可达 300 米。但相比毫米波雷达,其探测距离相对较短。2.4 技术成熟度与可靠性对比
摄像头技术最为成熟,已经大规模量产应用,可靠性高,维护成本低。更换一个摄像头仅需 100-300 元,且清洁标定简单。但其物理局限性无法通过算法完全弥补,在极端场景下的可靠性仍存在问题。毫米波雷达技术成熟度高,是目前量产车最普及的远距离测距传感器。特别是 4D 成像雷达技术的发展,大幅提升了其性能。但毫米波雷达存在对静止和横向移动物体不敏感、成像模糊等固有缺陷。激光雷达技术正在快速成熟,特别是固态化技术的发展解决了可靠性问题。混合固态激光雷达的寿命已超过 5 万小时,满足车规级要求。但激光雷达的维护成本较高,单颗激光雷达更换费用高达 2000-10000 元,原厂标定服务一次需要 500-2000 元。三、典型应用场景的适配性分析
3.1 高速公路场景
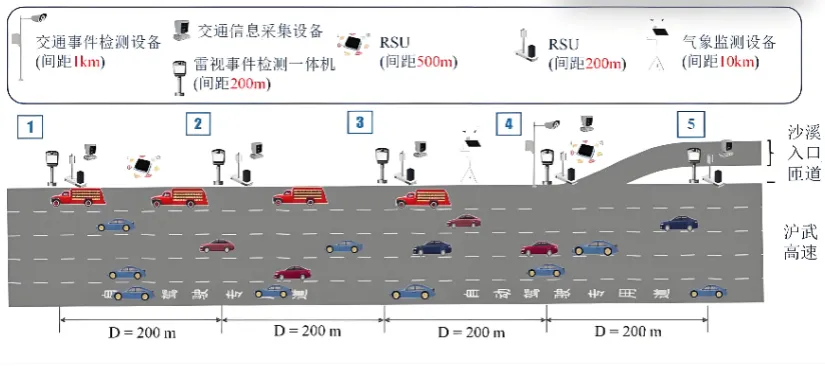
高速公路场景对传感器的远距离探测和精确测速能力要求极高。在这个场景下,三大传感器展现出了不同的价值:摄像头负责识别限速标志、车道线、前方车辆类型等关键信息,是车道保持(LKA)、车道居中(LCC)功能的核心。800 万像素前视摄像头能够清晰识别 250 米外的交通标志和车道线,为驾驶员提供充足的决策时间。毫米波雷达在高速场景中发挥着不可替代的作用。它能够实时监测前方车辆距离和相对速度,自动调整车速保持安全距离,是自适应巡航(ACC)系统的核心传感器。毫米波雷达的直接测速能力使其能够精确控制车速,在 0-150km/h 范围内实现自动跟车。更重要的是,在暴雨、浓雾等恶劣天气下,毫米波雷达仍能保持稳定的探测性能,为高速行驶提供安全保障。激光雷达在高速公路场景中主要提供高精度的三维环境建模能力。虽然高速公路环境相对简单,但激光雷达能够精确识别路沿、护栏、施工锥桶等异形障碍物,特别是在夜间或低光照条件下,其优势更加明显。在高速公路场景下,多传感器融合的优势尤为突出。当摄像头因逆光 "致盲" 时,毫米波雷达和激光雷达可以提供可靠的距离和速度信息;当激光雷达被大雨干扰时,摄像头和毫米波雷达的数据可以帮助系统维持正常运行。3.2 城市道路场景
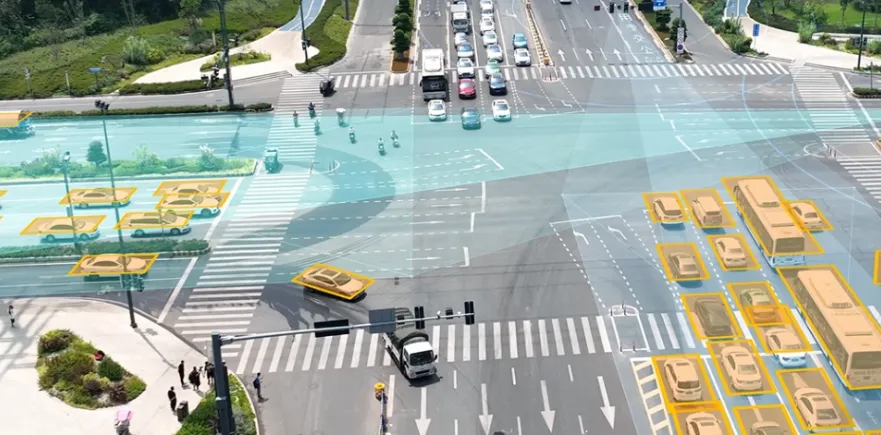
城市道路场景的特点是环境复杂多变,需要传感器具备强大的目标识别和实时响应能力:摄像头在城市道路中扮演着 "大脑" 的角色。它能够识别交通信号灯、区分行人与车辆、识别非机动车等,是城市自动驾驶中最重要的传感器。特别是在复杂的十字路口,摄像头能够理解交通规则,判断优先权,做出合理的决策。毫米波雷达在城市道路中主要负责检测移动障碍物,特别是突然出现的行人、横穿马路的非机动车等。其快速的响应能力和全天候工作特性,使其成为自动紧急制动(AEB)系统的核心组件。在城市拥堵路况下,毫米波雷达能够准确检测前方车辆的启停,实现跟车功能。激光雷达在城市道路中的价值体现在其对复杂异形障碍物的识别能力。城市环境中经常出现施工围挡、临时障碍物、倒地的共享单车等非常规物体,激光雷达能够通过其高精度的 3D 点云生成能力,准确识别这些物体的形状和位置。特别是在 "鬼探头" 场景下,激光雷达能够在摄像头还未识别出目标时就探测到潜在危险。在城市道路场景中,三种传感器形成了完美的互补关系:摄像头负责 "看懂" 交通规则和语义信息,毫米波雷达负责 "感知" 动态障碍物,激光雷达负责 "描绘" 复杂的三维环境。3.3 自动泊车场景
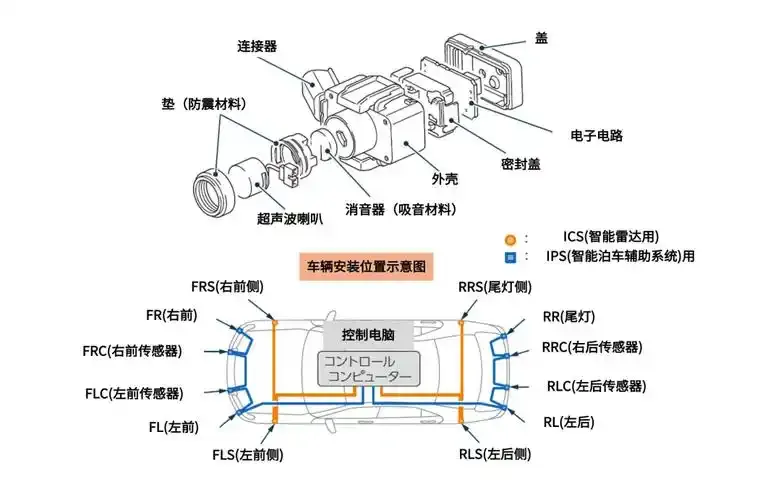
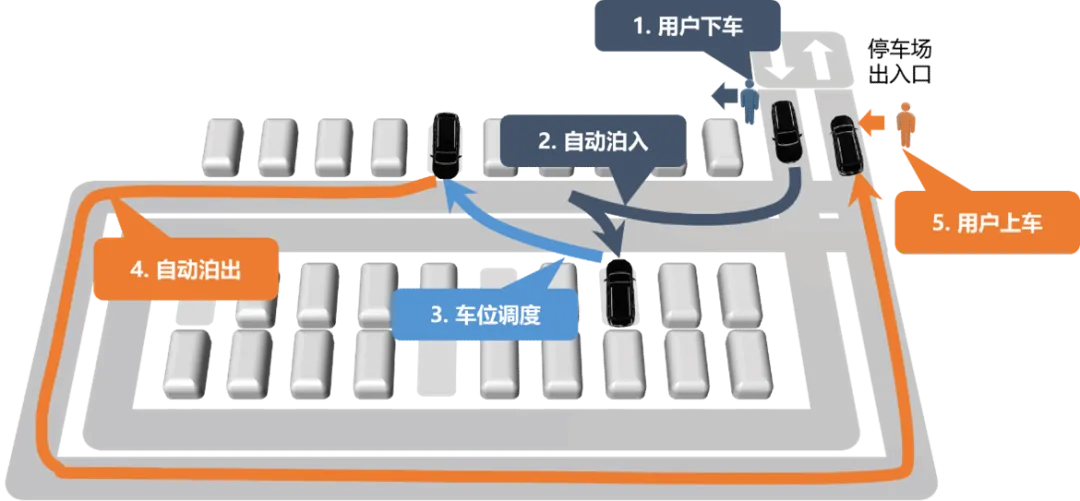
超声波雷达是自动泊车的 "黄金搭档",12 颗超声波雷达可覆盖车身 2 米范围,实现厘米级测距。它能够精确探测车位尺寸和障碍物,是自动泊车(APA)、记忆泊车等功能的标配传感器。摄像头在自动泊车中提供视觉辅助,环视鱼眼摄像头能够提供 360° 鸟瞰视图,帮助系统准确识别车位线和周围环境。特别是在狭窄的停车位中,摄像头能够提供直观的视觉反馈,增强用户信心。毫米波雷达在自动泊车位主要用于检测移动障碍物,防止在泊车过程中与其他车辆或行人发生碰撞。其全天候工作能力确保了在各种天气条件下都能安全完成泊车操作。激光雷达在高端自动泊车系统中发挥着重要作用。它能够构建停车场的高精度地图,实现厘米级的定位精度,支持记忆泊车等高级功能。特别是在多层停车场中,激光雷达能够准确识别楼层标识和车位编号。3.4 极端天气场景
在暴雨天气下,摄像头基本失效,激光雷达的探测距离缩短至正常情况的 30% 左右,而毫米波雷达仍能保持 80% 的性能。此时,系统主要依靠毫米波雷达提供的距离和速度信息,配合激光雷达的部分有效数据,维持基本的安全功能。在浓雾环境中(能见度 50 米),摄像头几乎完全无法工作,激光雷达的性能下降至 20%,而毫米波雷达仍能保持 90% 的探测能力。毫米波雷达成为此时唯一可靠的远距离探测手段。在夜间逆光条件下,摄像头因强光产生光晕和对比度降低,性能大幅下降,而毫米波雷达和激光雷达不受影响,能够正常工作。在隧道场景中,由于光线的剧烈变化,摄像头需要时间适应,而毫米波雷达和激光雷达能够立即提供稳定的环境信息。从极端天气场景的分析可以看出,单一传感器无法应对所有挑战,必须依靠多传感器融合才能确保在任何环境下都有足够的安全冗余。四、行业技术路线的发展趋势
4.1 特斯拉纯视觉路线
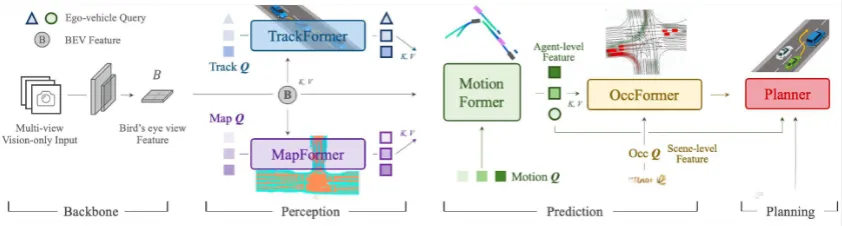
特斯拉坚持的纯视觉路线代表了一种激进的技术理念。从 2021 年开始,特斯拉全面转向纯视觉方案,取消了激光雷达和毫米波雷达,全车仅依靠 8 颗高清摄像头构建 360 度视野。特斯拉的技术逻辑基于一个核心信念:模仿人类视觉系统,仅依赖摄像头 + AI 算法实现环境感知。马斯克认为多传感器会产生数据冲突,增加系统复杂性,反而降低安全性。通过强大的软件算法去弥补硬件的物理局限,其核心突破是一种名为占用网络(Occupancy Network)的技术。成本优势巨大:硬件成本仅为 500-800 美元(约 3600-5800 元人民币),远低于多传感器方案系统简洁:单一传感器架构消除了时空对齐难题,OTA 升级即可持续改善数据飞轮效应:每辆量产车都是数据采集终端,PB 级视频数据通过自动化流水线高效转化为训练数据物理局限性无法克服:在强光、逆光、雨雾、扬尘等低能见度环境下识别失效安全隐患突出:美国 NHTSA 正在对约 320 万辆特斯拉汽车展开调查,发现 83% 的事故发生在夜间或光线不佳时段算法依赖度过高:完全依靠算法 "脑补" 三维空间,在面对非常规障碍物时容易出现误判值得注意的是,特斯拉在 2023 年初的新款 Model 3 和 Model Y 上偷偷加回了车头的毫米波雷达,这一行为被解读为对纯视觉方案的妥协。4.2 国内多传感器融合路线
与特斯拉的激进路线不同,国内车企普遍采用多传感器融合方案,坚持 "安全冗余优先" 的理念:华为采用 "激光雷达 + 纯视觉" 双冗余架构,2025 款问界 M9 搭载 ADS 3.3 版本,通过前翼子板与车尾门顶部共 4 颗固态激光雷达,配合分布式 4D 毫米波雷达矩阵,构建 500 米半径 3D 环境建模能力。其核心硬件组合包含 192 线高精激光雷达(184 万点 / 秒分辨率)与 5 颗 4D 雷达,实现复杂路口变道成功率 97.3%,暴雨环境响应时间仅 0.2 秒。理想汽车采用视觉 - 语言 - 行为大模型(VLA)+ 高拟真仿真系统,配备全天候激光雷达、800 万像素长焦摄像头等硬件。其技术路线强调安全优先,成熟度高,无重大事故记录。小鹏汽车则经历了从双激光雷达到纯视觉的转变。最新的 G9 车型原本搭载双激光雷达、12 个摄像头、5 个毫米波雷达、12 个超声波雷达,总算力达 508 TOPS。但从 G9 开始,小鹏拆除了所有激光雷达,转而采用纯视觉方案,其理由是激光雷达在 200 米外信息稀疏,不如 800 万像素摄像头;10-20Hz 的低帧率导致高速目标识别不稳;雨雾中穿透性差,依赖毫米波雷达补盲。安全冗余:任意单传感器失效不影响系统安全运行,硬件冗余提供可靠安全底线互补性强:激光雷达提供精确 3D 轮廓,弥补摄像头在深度感知上的先天缺陷;毫米波雷达在极端天气下仍可探测 100 米以上性能稳定:各传感器动态可信度加权,综合判断比任意单一感知源更鲁棒4.3 技术融合的新趋势
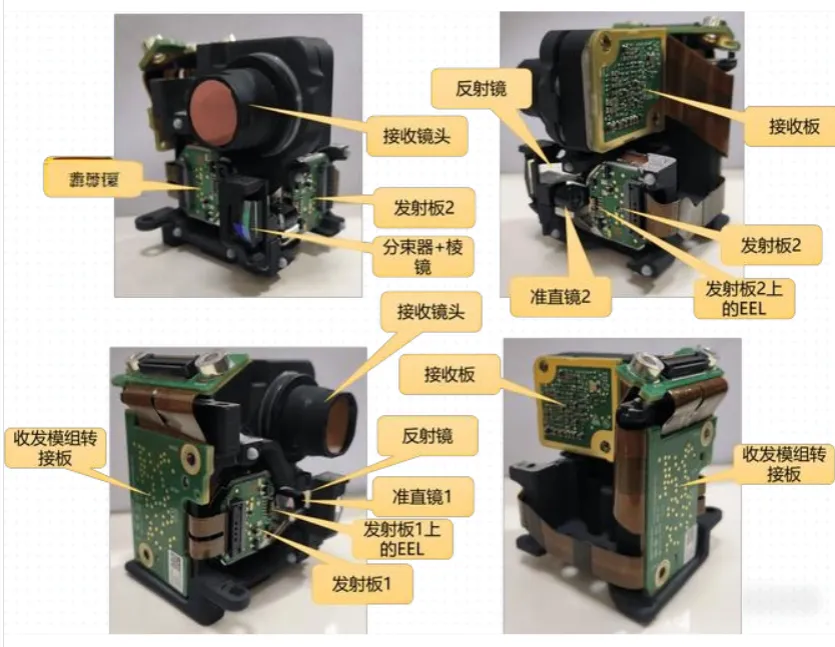
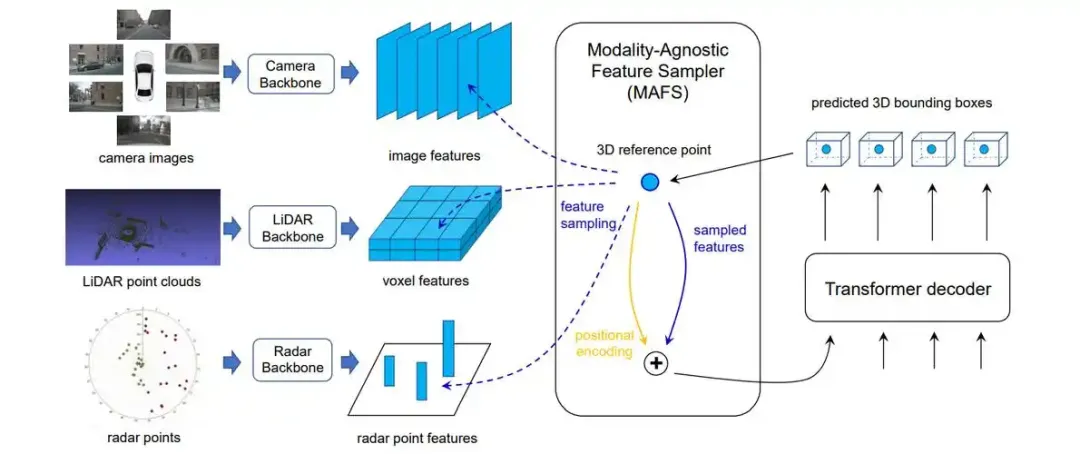
2026 年的行业趋势显示,纯视觉和多传感器融合两大阵营正在相互借鉴,走向融合:纯视觉系引入毫米波雷达补盲:特斯拉新款 Model 3 加回毫米波雷达,标志着纯视觉方案开始意识到单一传感器的局限性。这种做法既保持了成本优势,又提升了极端场景下的安全性。融合系通过 AI大模型减少对激光雷达的依赖:华为 ADS 4.0 采用 WEWA 架构,通过 AI 大模型优化传感器融合算法,减少了对激光雷达数量的依赖。这种做法在保持高安全性的同时,降低了系统成本。4D 毫米波雷达成为新宠:4D 毫米波雷达新增高度维度信息,可识别高架桥、路沿、静止障碍物,区分空中悬挂物与地面目标。其点云密度大幅提升,接近激光雷达入门水平,可实现目标轮廓建模。2026 年被称为 "4D 毫米波雷达元年",德赛西威、华为等厂商的 8T8R 方案将大规模量产。固态激光雷达成本突破:2026 年激光雷达前装渗透率突破 20%,成本降至 900-1500 元 / 颗,已经下放到 7 万级车型。比亚迪通过自研自产,将激光雷达成本压至 900 元左右,成功应用在海鸥等入门级车型上。前融合技术成为主流:过去以算法后融合为主,2026 年行业转向前融合 + 硬件同构,核心形态是共孔径融合:激光雷达(905/1550nm)、可见光摄像头、4D 毫米波雷达共享光学入口与光路,实现单探头多模态输出。这种技术大幅提升了感知精度和响应速度。五、到底谁更靠谱?综合评判与结论
5.1 基于安全性的客观评估
从安全性角度来看,答案已经非常明确。美国国家公路交通安全管理局(NHTSA)的调查数据提供了最权威的证据:NHTSA 对约 320 万辆特斯拉汽车展开的工程分析调查显示,纯视觉系统存在以下严重安全隐患:系统故障 / 性能退化的预警提示严重滞后,往往在碰撞前瞬间才发出更令人担忧的是,调查发现83% 的事故发生在夜间或光线不佳时段,这直接暴露了纯视觉方案在复杂环境下的可靠性不足。相比之下,采用多传感器融合方案的 Waymo,其 "激光雷达 + 毫米波雷达 + 摄像头" 三重感知系统,使事故率比人类驾驶低 60%。虽然每辆车的传感器成本高达 5000 美元(是纯视觉方案的 5 倍),但其安全性优势是显而易见的。从技术原理上分析,纯视觉方案本质上是用二维平面图像去猜测三维空间的距离,全靠算法 "脑补" 前方是否有障碍物。而激光雷达是绝对的物理测距,通过发射光波反射回来,通过时间差就能百分之百确认前方物体的存在,物理定律永远不会骗人。5.2 基于实用性的场景分析
从实用性角度来看,不同传感器在不同场景下各有优劣:场景类型 | 最靠谱的传感器 | 次选 | 备选 |
城市道路(晴天) | 摄像头 | 激光雷达 | 毫米波雷达 |
高速公路(暴雨) | 毫米波雷达 | 激光雷达 | 摄像头 |
夜间逆光 | 激光雷达 + 毫米波雷达 | 毫米波雷达 | 摄像头 |
隧道场景 | 毫米波雷达 + 激光雷达 | 激光雷达 | 摄像头 |
自动泊车 | 超声波雷达 + 摄像头 | 激光雷达 | 毫米波雷达 |
施工路段 | 激光雷达 | 毫米波雷达 | 摄像头 |
这个表格清晰地表明,没有任何一种传感器能够在所有场景下都表现最佳。摄像头在城市道路晴天条件下表现最佳,能够提供丰富的语义信息;毫米波雷达在恶劣天气下无可替代;激光雷达在需要高精度三维感知的场景中优势明显。5.3 基于成本效益的理性选择
从成本效益角度来看,需要综合考虑初始成本、维护成本和安全价值:纯视觉方案的优势在于:硬件成本极低、维护成本低、适合大规模普及但其劣势同样明显:极端场景安全性不足、算法开发成本高昂、长期风险难以评估多传感器融合方案的优势在于:安全性大幅提升、全天候工作能力、技术成熟可靠但其劣势包括:硬件成本较高、维护成本高、系统复杂度增加值得注意的是,随着技术进步,成本差距正在快速缩小。2026 年,激光雷达成本已经降至 900-1500 元,使得多传感器融合方案的性价比大幅提升。根据预测,到 2026 年底,L2 + 级自动驾驶系统的传感器总成本将降至 800-1000 美元,其中激光雷达占比从 40% 降至 25%。5.4 最终结论:融合才是王道
没有任何单一传感器是绝对靠谱的,只有多传感器融合才能实现真正可靠的自动驾驶。因此,对于 "到底谁更靠谱" 这个问题,正确的答案是:摄像头负责看懂世界,毫米波雷达负责全天候感知,激光雷达负责精确测距,三者缺一不可。六、对消费者的选购建议
基于以上分析,针对不同需求的消费者,我们提出以下选购建议:6.1 预算有限的实用主义者
如果你的预算在 10 万元以内,主要在城市道路行驶,建议选择配备基础 ADAS 功能的车型,重点关注:具备 ACC 自适应巡航和 AEB 自动紧急制动功能虽然没有激光雷达,但基础的安全功能已经能够应对大部分场景6.2 追求性价比的理性消费者
如果你的预算在 15-25 万元,建议选择配备 "摄像头 + 毫米波雷达 + 基础激光雷达" 的车型,重点关注:6.3 安全至上的谨慎驾驶者
如果你的预算在 25 万元以上,或者经常在恶劣天气下行驶,强烈建议选择多传感器融合的高端方案:配备 3-4 颗激光雷达 + 5 颗以上毫米波雷达6.4 科技爱好者的尝鲜选择
如果你是科技爱好者,愿意尝试新技术,可以关注以下趋势:结语:走向成熟的自动驾驶感知系统
回顾全文,我们对自动驾驶的三大 "眼睛" 进行了全面深入的分析。从技术原理到性能对比,从应用场景到行业趋势,我们发现了一个不变的真理:自动驾驶的可靠性不能依赖于任何单一传感器,只有通过多传感器的深度融合,才能构建真正安全可靠的感知系统。2026 年,随着 4D 毫米波雷达的普及、固态激光雷达成本的断崖式下跌、前融合技术的成熟,自动驾驶感知系统正在迎来一个新的时代。在这个时代里,传感器不再是简单的堆叠,而是通过智能算法实现深度协同,真正做到 "1+1+1>3" 的效果。对于消费者而言,我们建议保持理性,不要被单一技术路线所迷惑。真正的智能驾驶,需要的是一个能够在任何环境下都可靠工作的感知系统。而这个系统,必然是摄像头、毫米波雷达、激光雷达的完美融合。最后,我们想说的是,自动驾驶的未来不在于争论哪种传感器更靠谱,而在于如何让这些传感器更好地协同工作。只有这样,我们才能真正迎来一个安全、高效、智能的出行时代。在这个过程中,每一位消费者的选择都将推动技术的进步,每一次技术的突破都将让我们的出行更加美好。让我们共同期待,在不久的将来,自动驾驶技术能够真正成熟,为人类带来更加安全、便捷、环保的出行方式。而这一切的基础,正是建立在对传感器技术的深刻理解和合理应用之上。