数据闭环到训练闭环:2026年自动驾驶最新进展
- 2026-04-16 02:01:38
 「训练闭环,自动驾驶的下一站」
「训练闭环,自动驾驶的下一站」
截至2026年4月,自动驾驶技术正经历从传统数据闭环向训练闭环的范式升级,头部企业已完成技术路径验证并进入规模化落地阶段,行业整体向L3/L4高阶自动驾驶跨越的拐点已经显现,这场技术变革不仅重构了自动驾驶的研发逻辑,更加速了高阶智驾从实验室走向实际应用的进程。
自动驾驶技术的范式升级,源于传统数据闭环的固有瓶颈与训练闭环的价值突破。

传统数据闭环依赖“车端数据采集-云端标注训练-模型部署迭代”的固定循环,在高阶自动驾驶发展中逐渐暴露出短板:
其一,长尾场景覆盖不足,真实路测数据多集中于晴天、常规道路等常见场景,极端天气、复杂人车交互、罕见交通事件等边缘案例获取成本极高,仅靠实地采集难以覆盖所有行驶工况;
其二,模仿学习存在明显上限,AI基于人类驾驶数据进行学习,最终只能达到平均人类司机水平,无法突破安全决策、极端场景快速反应等能力天花板;
其三,迭代效率受限,数据标注、场景筛选等关键环节高度依赖人工介入,导致模型迭代周期以月为单位,难以满足高阶自动驾驶技术快速进化的需求。
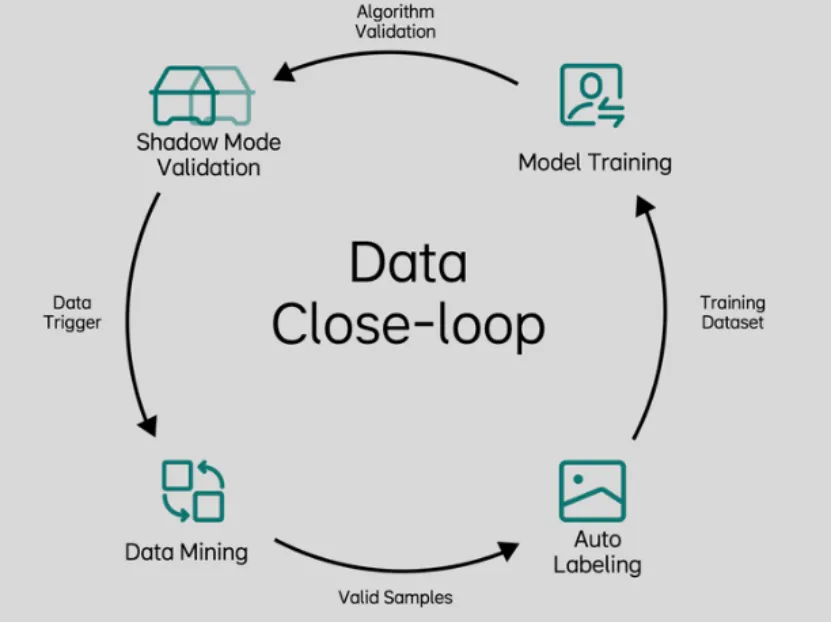
为突破上述瓶颈,训练闭环应运而生,其通过引入世界模型、合成数据、强化学习三大核心技术,实现了模型训练范式的本质突破。与传统数据闭环相比,训练闭环在其基础上构建了“云端世界模型生成虚拟场景-模型在仿真环境中自主探索学习-环境反馈自动优化模型”的自循环体系,不再完全依赖真实路测数据,能够实现模型能力的指数级提升,为L3/L4级自动驾驶的规模化落地奠定了核心基础。
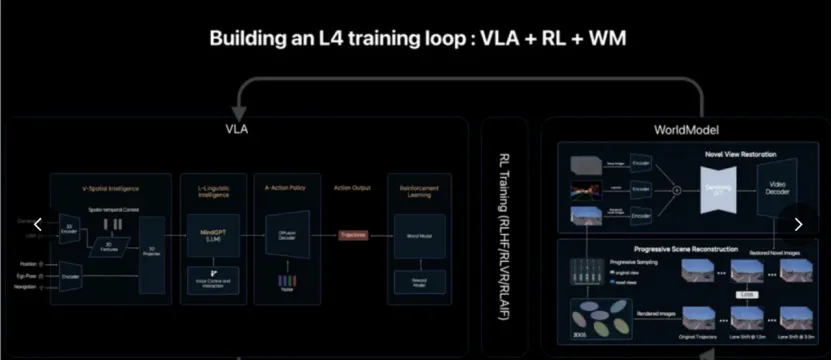
世界模型成为训练闭环的核心基座,具备区域级仿真评估、合成数据生成、强化学习环境引擎三大核心能力,成为连接虚拟训练与真实行驶的关键纽带。
当前,VLA(视觉-语言-行动)模型与世界模型深度融合已成为行业主流技术路线,前者负责复杂语义理解与人机交互,后者负责长尾场景生成与长时序决策推理,两者协同实现了驾驶场景的精准复刻与智能决策的高效落地。
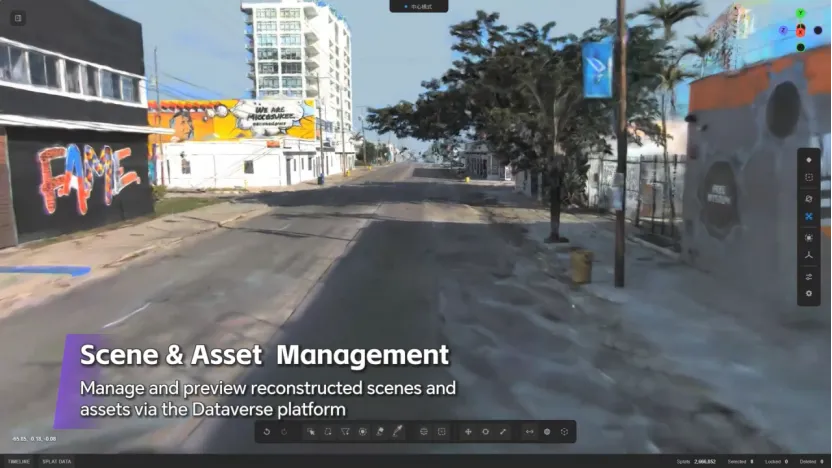
在仿真技术方面,重建与生成结合的路线成为主流,理想汽车提出的Hierarchy UGP 4D动态重建模型(ICCV 2025收录)可同时实现刚性/非刚性运动场景的高精度重建,在Waymo数据集上达到SOTA水平,该模型通过根、子场景和图元三层结构,用4D统一高斯图元实现大规模动态场景的精准建模;
英伟达Omniverse NuRec平台则基于3D Gaussian Splatting技术,可将真实路测数据自动重建为可交互仿真场景,将手工建模成本降低90%。
未来,仿真技术将呈现“重建占比逐步降低、生成式仿真占比持续提升”的趋势,最终将实现90%以上训练场景由AI自动生成。
合成数据已成为训练数据的核心来源,其技术已突破真实性瓶颈,2026年头部企业合成数据占训练数据的比例普遍超过40%。
当前合成数据已实现场景编辑、风格迁移、全场景生成三层应用,能够自动生成极端天气、罕见交通事件、复杂人车交互等长尾场景,有效弥补了真实路测数据的不足。
理想汽车的数据显示,合成数据与真实数据结合后,极端场景覆盖度提升300%,模型在雨天、夜间、无保护左转等难点场景的错误率下降47%。同时,行业开源生态持续完善,理想开源的3DRealCar数据集(Apache 2.0协议)包含2500辆真实汽车的多视角RGB-D数据,有效解决了行业高质量3D车辆数据匮乏的痛点,为中小车企的技术研发提供了支撑。
强化学习与世界模型的深度结合,让自动驾驶系统具备了自主探索和持续进化的能力,成为突破人类驾驶水平天花板的关键。
其核心技术框架是通过世界模型构建高保真仿真环境,智能体在该环境中与多交通参与者进行交互,奖励模型对驾驶行为进行实时打分反馈,从而实现端到端模型的自动优化。
其中,仿真智能体技术是目前技术难度最高的部分,通过自博弈与奖励函数约束结合的方式,能够实现对其他车辆、行人等交通参与者的行为建模,可模拟多样的驾驶风格与交互场景。
理想汽车相关负责人表示,完整建模他车、他车与自车、他车与他车的交互行为,甚至比实现单车L4级自动驾驶更具挑战性。从实际效果来看,特斯拉FSD V14版本引入强化学习训练后,罕见场景接管率下降32%,驾驶平顺性提升28%,已实现1万英里无接管跨美行驶,而该版本的核心技术革新——自回归Transformer,更是实现了决策逻辑的“类人化”跃迁,能提前预判道路参与者的未来行为,响应速度较上一版本提升40%。
理想汽车作为全球首个实现训练闭环量产落地的企业,2025年10月在ICCV 2025上正式宣布从数据闭环全面迈入训练闭环阶段,其核心技术细节的落地,构建了独特的竞争壁垒。
理想汽车搭建了完整的AI核心框架,由MindData、MindVLA-o1、MindSim、RL Infra四大核心模块组成,四者协同形成“感知-理解-行动-优化”的完整闭环,如同一个“数字大脑”,其中感知层对应视觉皮层,推理与规划如前额叶,场景生成似运动皮层,强化学习则类似多巴胺反馈,实现自主进化能力的持续提升。其核心模型MindVLA-o1以原生多模态MoE Transformer为核心,通过3D空间理解、多模态思考、统一行为生成、闭环强化学习和软硬件协同设计五大技术创新,构建了面向物理世界智能的自动驾驶基础模型,让自动驾驶系统看得更远、想得更深、行得更稳。
在训练闭环的关键环节,理想汽车进行了多项技术革新:在场景重建与仿真层面,将传统逐步优化式重建升级为Feed-forward(前馈)场景重建,可瞬时生成大规模、高保真驾驶场景,结合生成式模型实现场景的扩展、编辑与全新生成,同时开发统一的3D Gaussian Splatting渲染引擎和分布式训练框架,使渲染速度提升近2倍,整体训练成本降低约75%,大幅提升强化学习闭环的效率与经济性。
在端侧部署层面,理想汽车提出面向端侧大模型的软硬件协同设计定律,将模型结构与验证损失建模,结合Roofline模型刻画硬件约束,评估近2000种模型架构配置,在英伟达Orin与Thor平台上找到模型精度与推理延迟的帕累托前沿,将架构探索时间从数月缩短至数天,解决了端侧大模型部署耗时长、调试频繁的行业痛点。
其DriveVLM双系统架构(CoRL 2024收录)作为核心落地载体,采用“端到端+VLM”双系统方案,是行业内首个将VLM视觉语言模型部署到车端芯片的方案,其中VLM模型拥有22亿参数量,可精准识别中文交通标识、潮汐车道、限时公交道等本土场景语义,辅助端到端模型完成完整驾驶循环,而端到端模型则通过学习大量人类老司机数据,实现路边起步、U形掉头、环岛通行等复杂场景的拟人化决策,无需依赖人工定义规则,感知到控制的时延大幅降低,在行人横穿、车辆切入等场景中可快速反应、及时减速,兼顾安全与通行效率。
此外,2025年3月开源自研星环OS,已形成16家产业链伙伴的生态联盟,跨域协同能力的提升使120km/h工况下AEB刹停距离缩短7米;截至2026年4月,理想汽车累积训练里程已超过25亿公里,训练算力达到5.39EFLOPS,每年在训练算力的投入超过10亿元,且依托世界模型的云端部署,实现一周两个版本的高效迭代,领跑行业,其30万以上车型AD Max订单占比超过70%,80%用户使用NOA驾驶,充分验证了训练闭环技术的量产价值与用户认可度。
特斯拉则依托训练闭环实现了FSD与Robotaxi的双线突破,2026年2月推送的FSD V14.3版本完成强化学习训练架构升级,累计行驶里程突破84亿英里,北美用户实现平均1.2万英里一次接管,Grok大模型与FSD的融合实现了自然语言导航控制,进一步提升了人机交互体验。
值得注意的是,FSD V14系列版本本质上是特斯拉Robotaxi技术的“消费级转译”,诸多核心功能直接源自奥斯汀Robotaxi内测项目的实践积累,形成了“技术反哺”的良性循环。
在本土化布局方面,上海AI训练中心投入运营,实现“数据采集-本地存储-本土训练-车载部署”的完整闭环,中国版FSD预计2026年4月正式推送。
在Robotaxi落地方面,无方向盘Cybercab预计2026年4月量产,已在奥斯汀、湾区开展商业化运营,每公里定价1.4美元,较Waymo低44%,2026年计划扩展至美国7个核心城市,马斯克透露,2026年将把FSD V14.5版本部署至Robotaxi车队,取消随车安全员,仅保留远程接管团队。
英伟达则聚焦于提供训练闭环全栈标准化底座,在2026年GTC大会上发布了完整的自动驾驶训练闭环技术栈,涵盖模型层、仿真层、平台层和安全架构四大板块。
模型层方面,Alpamayo 1.5开放推理模型支持自然语言指令约束,可解释性大幅提升,已被全球超过10万名汽车开发者下载;
仿真层方面,Omniverse NuRec重建仿真平台与Cosmos世界基础模型结合,提供从数据生成、训练到验证的全流程工具链;
平台层方面,DRIVE Hyperion L4开发平台已获得比亚迪、吉利、日产、Uber等企业采用,Uber计划2027年基于该平台在洛杉矶、旧金山启动Robotaxi部署,2028年扩展至28个城市;

安全架构方面,Halos OS统一安全架构基于ASIL D级DriveOS构建,为AI驱动的自动驾驶系统提供可验证的量产级安全底座,全方位支撑行业规模化落地。
随着技术的不断成熟和企业的持续落地,2026年自动驾驶行业迎来产业化落地加速的关键阶段。
在产业化落地方面,政策端持续发力,2026年2月工信部发布L3/L4级自动驾驶强制国标,L3准入试点从特定路段扩展至城市全域,2026年成为L3规模化落地元年;渗透率持续提升,2025年国内城市NOA渗透率达12.8%,2026年高阶智驾功能加速下探至10-20万元车型,预计全年L2+渗透率将突破20%;技术平权趋势明显,全栈自研、自研+外采、全栈外采三种模式并存,第三方供应商的标准化方案使中小车企也能快速具备高阶智驾能力,行业竞争更加多元化。
与此同时,行业仍面临三个主要挑战:
一是仿真智能体的交互行为建模仍存在瓶颈,真实交通参与者的行为多样性与不可预测性难以1:1复刻,这也是目前强化学习应用中的核心难点;
二是强化学习的奖励函数设计难以完全匹配人类驾驶的复杂价值判断,极端场景的决策伦理仍需进一步优化,如何平衡安全、效率与人文关怀,成为行业需要共同解决的问题;
三是训练闭环的算力需求呈指数级增长,云端EFLOPS级超算集群成为新的竞争壁垒,目前算力成本仍较高,如何降低算力投入、提升算力利用效率,成为头部企业的重点攻关方向。
总体来看,2026年是自动驾驶从数据闭环向训练闭环全面升级的关键一年,核心技术的突破、头部企业的落地实践以及政策的持续支持,推动行业逐步迈入高阶自动驾驶的规模化发展阶段。尽管仍面临诸多挑战,但随着技术的不断迭代、生态的持续完善,自动驾驶有望在未来几年实现更大范围的普及,深刻改变人类的出行方式。
[1] 智源社区. ICCV涌现自动驾驶新范式:统一世界模型VLA,用训练闭环迈向L4[EB/OL]. 2025-11. (网络文献,获取日期:2026-04)
[2] 搜狐汽车. 吴新宙GTC交卷!英伟达自动驾驶三大核心技术升级,拉上车企组建L4联盟[EB/OL]. 2026-02. (网络文献,获取日期:2026-04)
[3] 电子工程专辑. 2026智能驾驶专题报告:技术路线逐渐清晰,高阶智驾迎来拐点[R]. 2026-04. (行业报告)
[4] TradingKey. 特斯拉(TSLA)2026深度研究报告:5倍定价分歧背后[R]. 2026-03. (行业研究报告)




· 计划周期:深蓝学院将以3个月为一个周期,建立工程师&学术研究者的「同好社群」
· 覆盖方向:自动驾驶、具身智能(人形、四足、轮式、机械臂)、视觉、无人机、大模型、医学人工智能……16个热门领域
扫码添加阿蓝
选择想要加入的交流群即可
(按照提交顺序邀请,请尽早选择)
👇


