
🚗 自动驾驶规划轨迹总像“鬼画符”?同济大学新方法教你“稳”字诀!扩散模型生成的轨迹天马行空,但物理可行性堪忧?别急,FeaXDrive从训练、推理到后训练全链路注入“可行性”基因,让AI开的车不仅聪明,更靠谱!👇扫码加入「龙哥读论文」知识星球,第一时间获取自动驾驶等前沿领域硬核解读,让你的研究快人一步!

龙哥推荐理由:
这篇论文精准地戳中了当前端到端扩散规划的一个“痛点”:生成的轨迹看着像那么回事,但细究起来,曲率突变、冲出路面等物理不可行问题频发。同济大学团队提出的FeaXDrive,思路清晰且系统,从“以轨迹为中心”这个根本性重构出发,在训练、推理、后训练三个环节都嵌入了可行性增强模块,实验扎实,效果显著。对于从事自动驾驶规划、机器人控制乃至任何需要生成物理可行轨迹的研究者来说,这篇论文提供了一个非常值得借鉴的“可行性增强”框架。
原论文信息如下:
论文标题:
FeaXDrive: Feasibility-aware Trajectory-Centric Diffusion Planning for End-to-End Autonomous Driving
发表日期:
2026年04月
发表单位:
同济大学汽车学院
原文链接:
https://arxiv.org/pdf/2604.12656v1.pdf
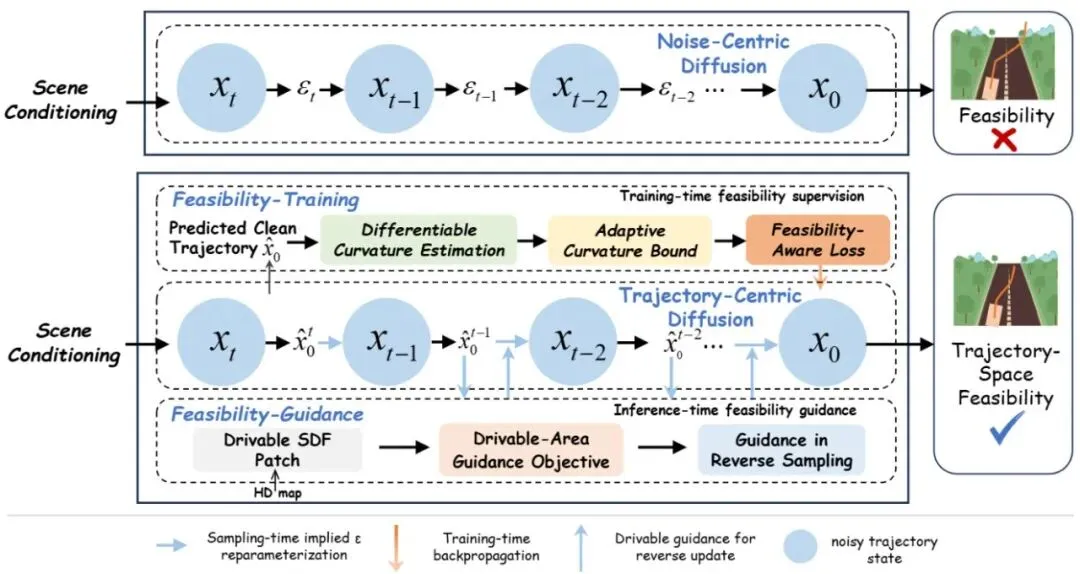
想象一下,你坐在一辆号称“全栈自研、端到端”的自动驾驶车里。前方路口需要左转,车辆大脑里的扩散模型经过一番“深思熟虑”,生成了一条未来轨迹。从上帝视角看,这条轨迹的终点是对的,但中间过程可能让你惊出一身冷汗:轨迹点像抽风一样忽左忽右(局部几何不规则),或者转弯半径小到违背物理定律(曲率突变,意味着方向盘得瞬间打死),甚至车子半个身子都轧到了路沿石外面(偏离可行驶区域)。这就是当前许多端到端扩散规划模型面临的尴尬:生成的轨迹“语义”上可能合理(比如知道要左转),但物理可行性(Physical Feasibility)堪忧,仿佛是AI在“鬼画符”。同济大学团队在论文中,通过复现现有的扩散规划器发现,在那些导致规划得零分的场景里,偏离可行驶区域是头号失败原因,占比超过一半!紧随其后的就是责任碰撞。表1:复现的基于扩散的规划器在得分为零的场景中的失败原因分布。百分比是针对每个规划器的得分为零场景计算的。问题的根源在哪?论文指出了一个关键:主流扩散规划采用“以噪声为中心(Noise-centric)”的范式。简单说,模型在训练和推理时,主要学习和预测的是添加到干净数据上的“噪声”。然而,车辆运动的可行性——比如轨迹是否平滑、曲率是否合理、是否在车道内——这些属性天然地定义在干净的轨迹空间(Clean Trajectory Space)里,而不是噪声空间里。这就好比你想教AI画一条完美的直线,却一直让它去琢磨画布上那些杂乱无章的噪点应该怎么改,而不是直接告诉它直线应该长什么样。可行性相关的信号需要绕个弯,通过中间变量间接影响生成过程,效果自然打折扣。面对这个业界痛点,同济大学的FeaXDrive提出了一个直击要害的思路:别绕弯子了,我们直接“以轨迹为中心(Trajectory-centric)”。核心创新:把“干净轨迹”作为扩散模型的中心
 FeaXDrive最核心的思想转变,就是从“预测噪声”变为“预测干净的轨迹”。在扩散过程的每一步(无论是训练还是推理),模型不再只输出当前状态里掺杂的噪声估计,而是直接输出一个对最终干净轨迹的估计值:
FeaXDrive最核心的思想转变,就是从“预测噪声”变为“预测干净的轨迹”。在扩散过程的每一步(无论是训练还是推理),模型不再只输出当前状态里掺杂的噪声估计,而是直接输出一个对最终干净轨迹的估计值: 这个看似简单的转变,带来了巨大的便利:干净的轨迹估计成为了一个统一的接口。现在,所有关于轨迹可行性的建模、约束、引导,都可以直接、无损耗地施加在这个上。训练时,可以用真实的干净轨迹直接监督它;可以计算它的曲率看是否合理;可以判断它的位置是否在可行驶区域内。推理时,也可以在每一步生成上施加几何引导,让它更符合道路结构。这就好比从“琢磨怎么改掉画布上的污渍”变成了“直接在一张干净的草稿纸上勾勒线条”,并且随时可以用尺规(可行性约束)来修正这条线。整个方法变得更直观,物理可解释性也更强。图1:FeaXDrive方法总览。与以噪声为中心的扩散规划相比,FeaXDrive采用以轨迹为中心的表述,其中预测的干净轨迹作为可行性感知建模的统一对象。在此基础上,该方法结合了可行性感知训练和推理时的可行驶区域引导,以增强整个扩散规划过程中的轨迹空间可行性。有了“以轨迹为中心”这个强大的基础框架,FeaXDrive就可以在上面施展拳脚,打造一套覆盖训练、推理、乃至训练后优化的全链路可行性增强方案。
这个看似简单的转变,带来了巨大的便利:干净的轨迹估计成为了一个统一的接口。现在,所有关于轨迹可行性的建模、约束、引导,都可以直接、无损耗地施加在这个上。训练时,可以用真实的干净轨迹直接监督它;可以计算它的曲率看是否合理;可以判断它的位置是否在可行驶区域内。推理时,也可以在每一步生成上施加几何引导,让它更符合道路结构。这就好比从“琢磨怎么改掉画布上的污渍”变成了“直接在一张干净的草稿纸上勾勒线条”,并且随时可以用尺规(可行性约束)来修正这条线。整个方法变得更直观,物理可解释性也更强。图1:FeaXDrive方法总览。与以噪声为中心的扩散规划相比,FeaXDrive采用以轨迹为中心的表述,其中预测的干净轨迹作为可行性感知建模的统一对象。在此基础上,该方法结合了可行性感知训练和推理时的可行驶区域引导,以增强整个扩散规划过程中的轨迹空间可行性。有了“以轨迹为中心”这个强大的基础框架,FeaXDrive就可以在上面施展拳脚,打造一套覆盖训练、推理、乃至训练后优化的全链路可行性增强方案。三大法宝:从训练、推理到后训练的全链路可行性增强
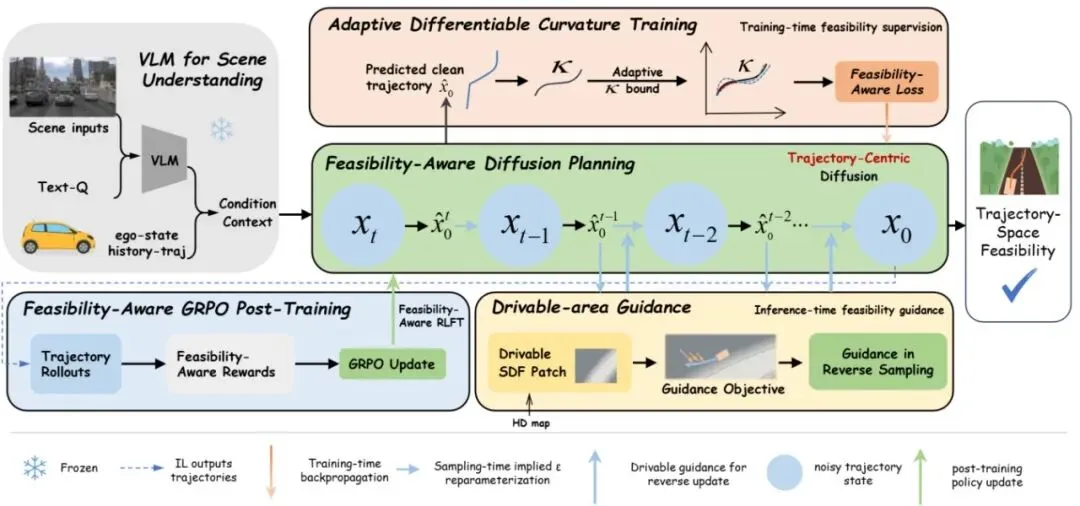
光有框架不够,还得有实打实的技术。FeaXDrive的三大核心技术模块,恰好对应了模型生命周期的三个关键阶段,形成了一个闭环的可行性增强链路。图2:FeaXDrive的整体架构。在轨迹中心化表述下,预测的干净轨迹作为贯穿训练、推理和后训练的可行性感知建模的共享对象。该方法集成了自适应可微曲率约束训练、反向扩散采样期间的可行驶区域引导以及可行性感知GRPO后训练。这是内功心法,在模仿学习(IL)训练阶段就教模型生成“本分”的轨迹。核心是给损失函数加一个可行性损失,惩罚那些曲率过大的轨迹点。但曲率怎么算?直接用离散轨迹点差分,会因噪声而产生剧烈波动。FeaXDrive先用一个轻量的可微平滑操作处理轨迹坐标,然后用弧长参数化的方式估算曲率,这样更符合几何定义,也更稳定。更妙的是自适应曲率阈值:一个固定阈值行不通。低速时,主要防几何上的“抽风”;高速时,即使曲率不大,也可能导致侧向加速度超标(想想高速急转弯的离心力)。FeaXDrive的阈值是动态的:取一个固定几何上限和一个基于当前速度的动态上限(由最大允许侧向加速度推导而来)两者中的最小值。这样,低速时约束几何形状,高速时自动收紧约束,保证动力学可行。
 总训练损失就是轨迹回归损失和这个可行性损失的加权和。这就从数据分布层面,引导模型倾向于生成更平滑、更符合车辆运动学的轨迹。这是外家功夫,在模型推理(开车)的时候实时纠偏。光靠训练出来的“习惯”可能还不够,遇到复杂路形,生成的轨迹可能还是会压线。FeaXDrive在反向扩散采样的每一步都介入:利用高清地图构建一个局部有符号距离场(SDF, Signed Distance Field)。SDF是一个魔法工具,对于地图上任何一点,它能告诉你这个点在可行驶区域内还是外,以及离边界有多远(距离值,在内部为正,外部为负)。然后,计算当前预测轨迹的每个点相对于这个SDF的“违规损失”。如果点太靠近或超出边界,这个损失就大。接着,沿着这个损失的梯度反方向,微调位置,把它“拉”回道路内。这个修正后的轨迹再用于下一步的采样更新。
总训练损失就是轨迹回归损失和这个可行性损失的加权和。这就从数据分布层面,引导模型倾向于生成更平滑、更符合车辆运动学的轨迹。这是外家功夫,在模型推理(开车)的时候实时纠偏。光靠训练出来的“习惯”可能还不够,遇到复杂路形,生成的轨迹可能还是会压线。FeaXDrive在反向扩散采样的每一步都介入:利用高清地图构建一个局部有符号距离场(SDF, Signed Distance Field)。SDF是一个魔法工具,对于地图上任何一点,它能告诉你这个点在可行驶区域内还是外,以及离边界有多远(距离值,在内部为正,外部为负)。然后,计算当前预测轨迹的每个点相对于这个SDF的“违规损失”。如果点太靠近或超出边界,这个损失就大。接着,沿着这个损失的梯度反方向,微调位置,把它“拉”回道路内。这个修正后的轨迹再用于下一步的采样更新。 关键是,这不是事后打补丁(生成完再修),而是在生成过程中实时、迭代的引导。道路的几何先验像一只“看不见的手”,在每一步都轻轻地把轨迹往正确的道路上推,最终结果自然与可行驶区域高度一致。这是强化学习(RL)微调阶段,让模型“更上一层楼”。模仿学习学的是“像人类一样开”,而强化学习可以学“开得更好”。FeaXDrive采用了Group Relative Policy Optimization (GRPO) 方法进行后训练。它的聪明之处在于奖励函数的设计:不仅包含任务性能奖励(如是否安全、舒适、高效),还明确加入了可行性奖励 ∥∥m∥a∥t∥h∥c∥a∥l∥{∥R∥}∥∥{∥f∥e∥a∥}∥ ,用于鼓励低曲率、遵守可行驶区域等行为。
关键是,这不是事后打补丁(生成完再修),而是在生成过程中实时、迭代的引导。道路的几何先验像一只“看不见的手”,在每一步都轻轻地把轨迹往正确的道路上推,最终结果自然与可行驶区域高度一致。这是强化学习(RL)微调阶段,让模型“更上一层楼”。模仿学习学的是“像人类一样开”,而强化学习可以学“开得更好”。FeaXDrive采用了Group Relative Policy Optimization (GRPO) 方法进行后训练。它的聪明之处在于奖励函数的设计:不仅包含任务性能奖励(如是否安全、舒适、高效),还明确加入了可行性奖励 ∥∥m∥a∥t∥h∥c∥a∥l∥{∥R∥}∥∥{∥f∥e∥a∥}∥ ,用于鼓励低曲率、遵守可行驶区域等行为。 这样,在追求开得好的同时,也把“开得稳、开得合规”作为明确目标进行优化。这证明了FeaXDrive的规划器能很好地与下游策略优化兼容,形成良性循环。理论说得再好,不如实验结果有说服力。这套组合拳到底效果如何?
这样,在追求开得好的同时,也把“开得稳、开得合规”作为明确目标进行优化。这证明了FeaXDrive的规划器能很好地与下游策略优化兼容,形成良性循环。理论说得再好,不如实验结果有说服力。这套组合拳到底效果如何?实验结果:不仅开得好,而且开得“稳”
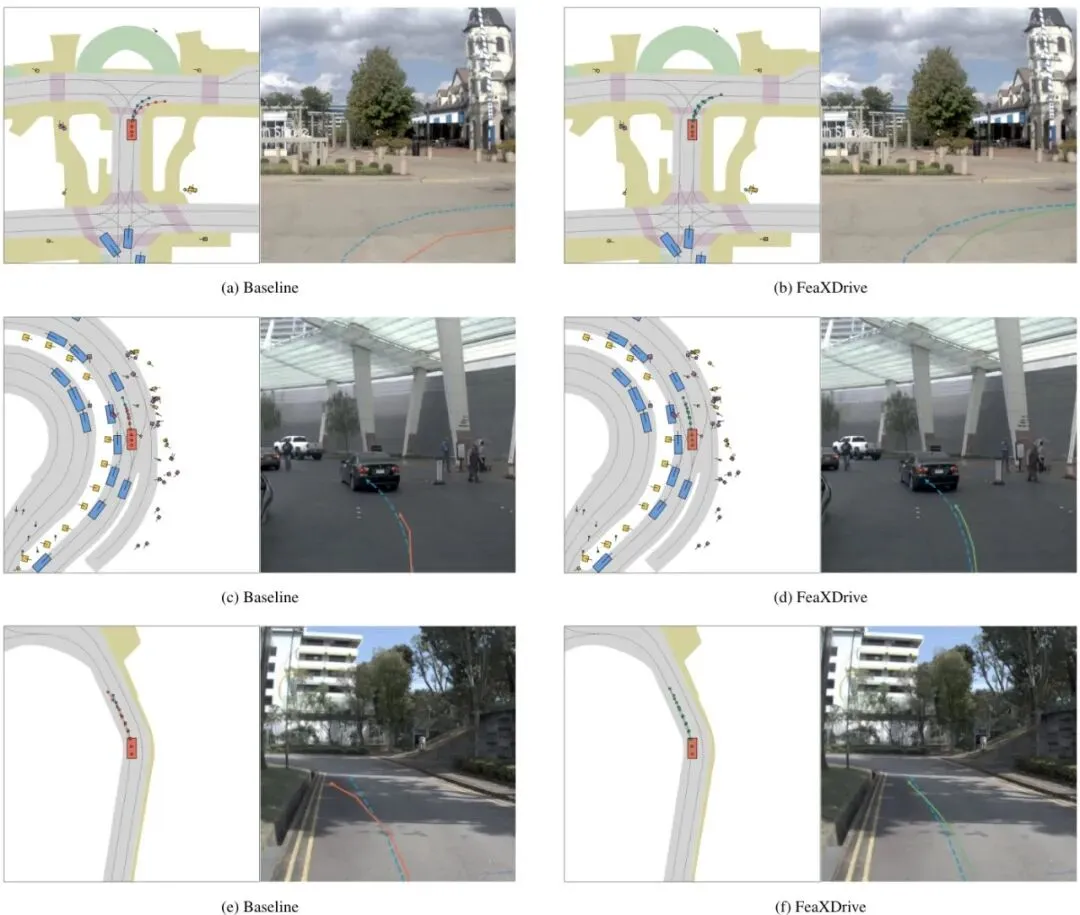
论文在权威的NAVSIM仿真基准上进行了闭环规划测试。结果非常亮眼:FeaXDrive在核心驾驶指标(平均得分、驾驶分数、安全分数)上全面领先于其他先进的端到端规划器,包括DiffusionDrive、ReCogDrive、VAD等。更重要的是,在它最关注的轨迹可行性指标上,提升是“颠覆性”的。从表2可以看到,仅使用模仿学习(IL)的FeaXDrive,其“曲率违规率”和“可行驶区域违规率”就已经远低于其他基线。经过可行性感知GRPO微调后(FeaXDrive-FT),这两个违规率更是进一步大幅降低,几乎趋近于零,同时驾驶得分还有显著提升,真正做到了性能与安全(可行性)的双赢。再看看具体的消融实验,更能看出每个“法宝”的贡献:表3:复现的基于扩散的规划器之间的曲率违规率比较。表4:所提方法在基准性能和轨迹空间可行性方面的模仿学习阶段消融研究。表4清晰地展示了“轨迹中心化”(x₀-pred)是基础,在此之上加入“自适应曲率约束”(+Curv)能极大降低曲率违规;再加入“可行驶区域引导”(+DrvGuide)则能显著降低道路违规。三者缺一不可,共同铸就了低违规率和高性能。图6:在代表性规划场景上,以噪声为中心的基线方法与FeaXDrive的定性比较。从上到下:局部几何不规则、轨迹级运动学不可行、以及可行驶区域不一致。与基线相比,FeaXDrive生成的轨迹更平滑、运动学上更可行、并且与可行驶区域的对齐更好。图6一目了然。左边基线方法生成的轨迹(红色)要么像锯齿一样不平滑,要么转弯急到违反物理(曲率云图显示深红色违规),要么直接开出道路。而右边的FeaXDrive轨迹(绿色)平滑流畅,曲率始终保持在合理范围(绿色/黄色),且稳稳行驶在车道内。这种视觉上的“稳”感,正是物理可行性的直接体现。当然,方法也有代价。由于在推理时引入了可行驶区域SDF引导,增加了计算量,FeaXDrive的单次规划延迟比纯扩散基线要高一些(论文中显示约为2.5倍)。这是用计算时间换取安全性和合规性,一个经典的权衡。未来展望:更轻量化、更统一的可行性建模
 FeaXDrive已经迈出了坚实的一步,但自动驾驶的可靠性之路无止境。论文在最后也指出了几个有前景的未来方向:1. 更轻量的几何先验: 目前推理依赖高清地图构建SDF。未来可以探索更轻量的地图表示(如稀疏地标、隐式神经表示),甚至直接从感知模块在线生成几何先验,降低对高精地图的依赖。2. 更统一的可行性建模: 将曲率、可行驶区域、甚至交通规则等更多维度的可行性约束,更紧密地统一到“以轨迹为中心”的框架中,进行端到端的联合学习和优化。3. 探索其他生成模型: “以轨迹为中心”的思想具有普适性,未来可以探索在流模型、基于分数的模型等其他生成框架中应用类似的可行性增强策略。可以说,FeaXDrive不仅提出了一个有效的解决方案,更重要的是为社区提供了一个清晰的“可行性增强”范式:将可行性直接建模在生成目标上,并通过训练、推理、优化的全链路来保障它。
FeaXDrive已经迈出了坚实的一步,但自动驾驶的可靠性之路无止境。论文在最后也指出了几个有前景的未来方向:1. 更轻量的几何先验: 目前推理依赖高清地图构建SDF。未来可以探索更轻量的地图表示(如稀疏地标、隐式神经表示),甚至直接从感知模块在线生成几何先验,降低对高精地图的依赖。2. 更统一的可行性建模: 将曲率、可行驶区域、甚至交通规则等更多维度的可行性约束,更紧密地统一到“以轨迹为中心”的框架中,进行端到端的联合学习和优化。3. 探索其他生成模型: “以轨迹为中心”的思想具有普适性,未来可以探索在流模型、基于分数的模型等其他生成框架中应用类似的可行性增强策略。可以说,FeaXDrive不仅提出了一个有效的解决方案,更重要的是为社区提供了一个清晰的“可行性增强”范式:将可行性直接建模在生成目标上,并通过训练、推理、优化的全链路来保障它。龙迷三问
这篇论文到底解决了自动驾驶规划中的什么问题?它解决了端到端扩散规划模型生成的轨迹“物理不可行”的问题。具体表现为轨迹不平滑(局部几何不规则)、转弯过急(违反车辆运动学曲率限制)、以及偏离车道或可行驶区域。这些问题会导致乘坐不适甚至安全事故。FeaXDrive通过系统性方法,显著提升了生成轨迹的物理可行性和安全性。
文中的“轨迹中心化”和“噪声中心化”具体指什么?这是两种扩散模型的参数化方式。“噪声中心化”是常见做法,模型直接预测添加到数据中的噪声项。“轨迹中心化”是本文的核心创新,模型直接预测去噪后的干净轨迹估计。后者使得所有关于轨迹可行性的约束和引导都能直接、直观地施加在预测目标上,而不需要绕道噪声空间,从而更有效。
FeaXDrive的方法除了自动驾驶,还能用在别的地方吗?当然可以!其核心思想——将物理或几何可行性直接建模在生成模型的输出目标上,并进行全链路增强——具有广泛的适用性。任何需要生成物理可行轨迹的领域都可以借鉴,比如机器人运动规划(确保机械臂不撞到自己、末端轨迹平滑)、无人机航路规划(考虑动力学约束与避障)、甚至动画中角色的物理合理运动生成等。
如果你还有哪些想要了解的,欢迎在评论区留言或者讨论~龙哥点评
论文创新性分数:★★★★☆
四星。核心创新“以轨迹为中心”的范式转换思路清晰,直击痛点,且在此框架下集成的三项技术(自适应曲率约束、可行驶区域引导、可行性感知GRPO)构成了一个系统性的解决方案。虽非颠覆性理论突破,但在工程方法论上具有很高的创新性和启发性。实验合理度:★★★★★
五星。实验设计全面扎实。在权威的NAVSIM基准上进行闭环测试,对比了当前主流的SOTA方法;进行了详尽的消融实验,清晰证明了每个模块的有效性;同时提供了丰富的定量指标(驾驶得分、两种违规率)和定性可视化对比,结果可信度高。学术研究价值:★★★★★
五星。价值非常高。精准定位了端到端扩散规划中一个关键且未被系统解决的“可行性”问题,并提供了一个清晰、可扩展的解决框架。“轨迹中心化”的思想和全链路增强的范式,对自动驾驶规划、机器人控制乃至其他需要生成物理可行序列的领域,都有很强的借鉴意义。稳定性:★★★☆☆
三星。方法在仿真中表现出极高的稳定性(违规率极低)。但实际落地稳定性仍存疑,因为推理时严重依赖高精度地图提供的SDF进行实时引导。在无图或轻图区域,该引导机制可能失效或引入噪声,需要额外的鲁棒性设计。适应性以及泛化能力:★★★★☆
四星。自适应曲率约束和基于学习的规划主干赋予了模型较好的场景适应能力。只要可行驶区域先验(SDF)能准确提供,引导机制就能工作。但泛化能力受限于训练数据分布和地图先验的准确性,在完全未知的道路结构或极端场景下仍需验证。硬件需求及成本:★★★☆☆
三星。扩散模型本身推理成本就不低,叠加每一步的SDF查询和梯度引导计算,使得单次规划延迟显著增加(论文显示约为基线的2.5倍)。对车载计算芯片的算力和实时性提出了更高要求,是产品化需要考虑的成本。复现难度:★★★★☆
四星。论文方法描述清晰,各个模块的技术细节交代比较清楚。但涉及完整的端到端驾驶系统(包含VLM编码、扩散规划、GRPO微调等),且需要在NAVSIM等复杂仿真环境中训练和评估,对工程实现能力和计算资源有一定要求。若能开源代码将极大降低复现难度。产品化成熟度:★★★☆☆
三星。目前仍处于前沿研究阶段,在仿真中验证了卓越性能。迈向产品化需要克服几个关键障碍:1) 推理延迟的优化;2) 对高精地图依赖的减弱或替代方案;3) 在更大量、更复杂的真实世界数据上进行充分验证和迭代。可能的问题:本文的亮点在于系统性的方法论,但技术实现上对离线高精地图(用于构建SDF)的强依赖是一个明显弱点,限制了其在无图或众包地图场景下的应用。未来需要研究如何与在线感知输出的轻量化几何表示相结合。Baoyun Wang, Zhuoren Li, Ming Liu, Xinrui Zhang, Bo Leng, Lu Xiong. FeaXDrive: Feasibility-aware Trajectory-Centric Diffusion Planning for End-to-End Autonomous Driving. arXiv preprint arXiv:2604.12656, 2026.*本文仅代表个人理解及观点,不构成任何论文审核或者项目落地推荐意见,具体以相关组织评审结果为准。欢迎就论文内容交流探讨,理性发言哦~ 想了解更多原文细节的小伙伴,可以点击左下角的"阅读原文",查看更多原论文细节哦!
想让你的AI模型也“开”得又稳又安全?快来加入龙哥读论文粉丝群,
扫描下方二维码或者添加龙哥助手微信号加群:kangjinlonghelper。
一定要备注:研究方向+地点+学校/公司+昵称(如 自动驾驶+上海+同济+龙哥),根据格式备注,可更快被通过且邀请进群。



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
