前言:你有没有想过,为什么自动驾驶汽车在拥堵时能自动跟车不追尾?在高速上能平稳变道?在无保护左转时能精准“找空隙”?
它不是靠“预设程序”死板执行,而是像一个经验丰富的老司机——先看懂环境,再决定怎么走,最后用最舒服的方式开过去。
这个“看懂—决定—执行”的全过程,就是自动驾驶的规划与控制(Planning & Control,简称PNC)。
- P = Planning(规划):决定“怎么走”
- C = Control(控制):决定“怎么动”
规控是自动驾驶的“大脑+手脚”,是决策与执行的核心中枢。规划=老司机的“脑子”;控制 = 老司机的“手脚”。
在自动驾驶系统中的位置:感知 → 定位 → 预测 → 规控 → 执行 | | |
|---|
| 用if-else逻辑写驾驶策略,如“前车<50m则减速” | |
| 基于优化(Optimization-based) | | |
比如无人车车速上限为5.5m/s,约等于19.8km/h,接近20km/h。而20km/h是碰撞致死率显著下降的临界线,在这种车速下,紧急制动的距离约等于3米,感知-决策-执行有充足的冗余。 | | |
| | |
| | |
| | 此为有保护左转,不然受到传感器的识别距离影响。 |
| | |
| 弱 | 空旷道路上可以成功,有车流则容易长时间刹停阻塞 |
绕行 | 较强 | 因遮挡导致看不清前方状态的除外 |
跟随 | | |
| | 只超越静止或极慢(步行速度或以下)的障碍物,因为快速障碍物需要较长时间超越,目前视距较短,不能保证安全 |
| | 可正常处理分叉道 |
| | 目前具有最右侧机动车道和非机动车道灵活换道的能力 |
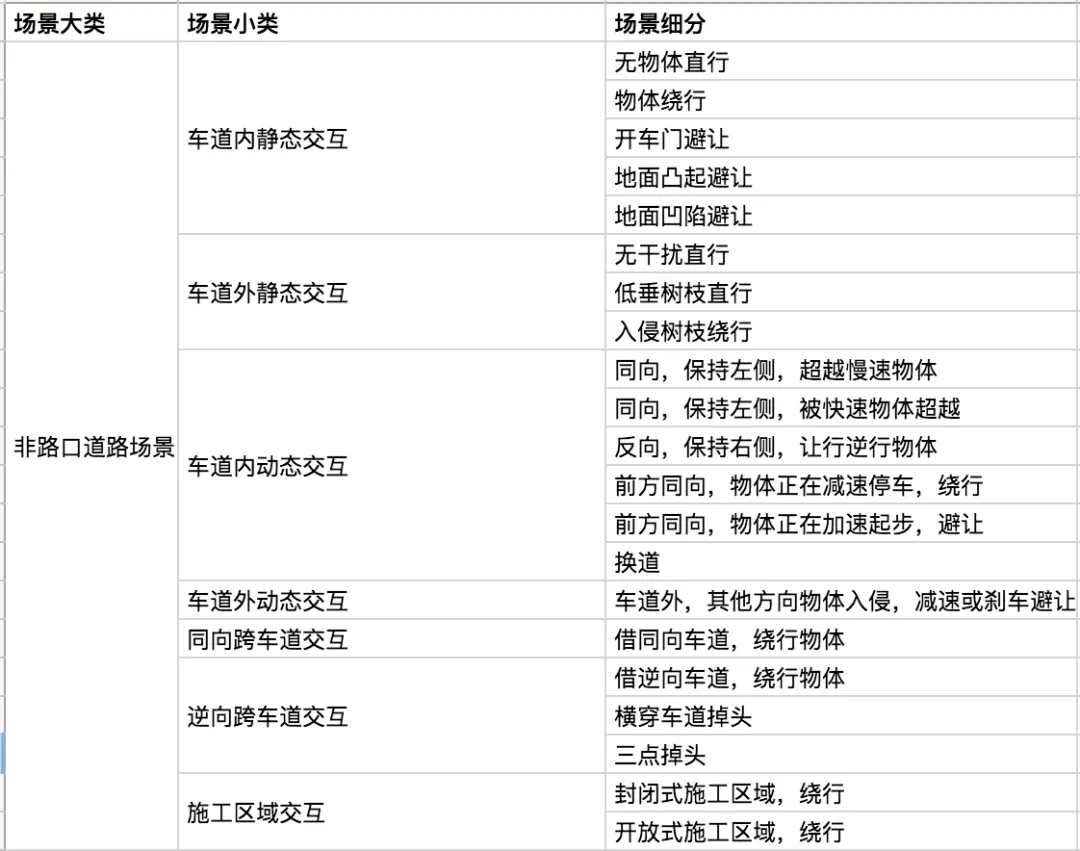
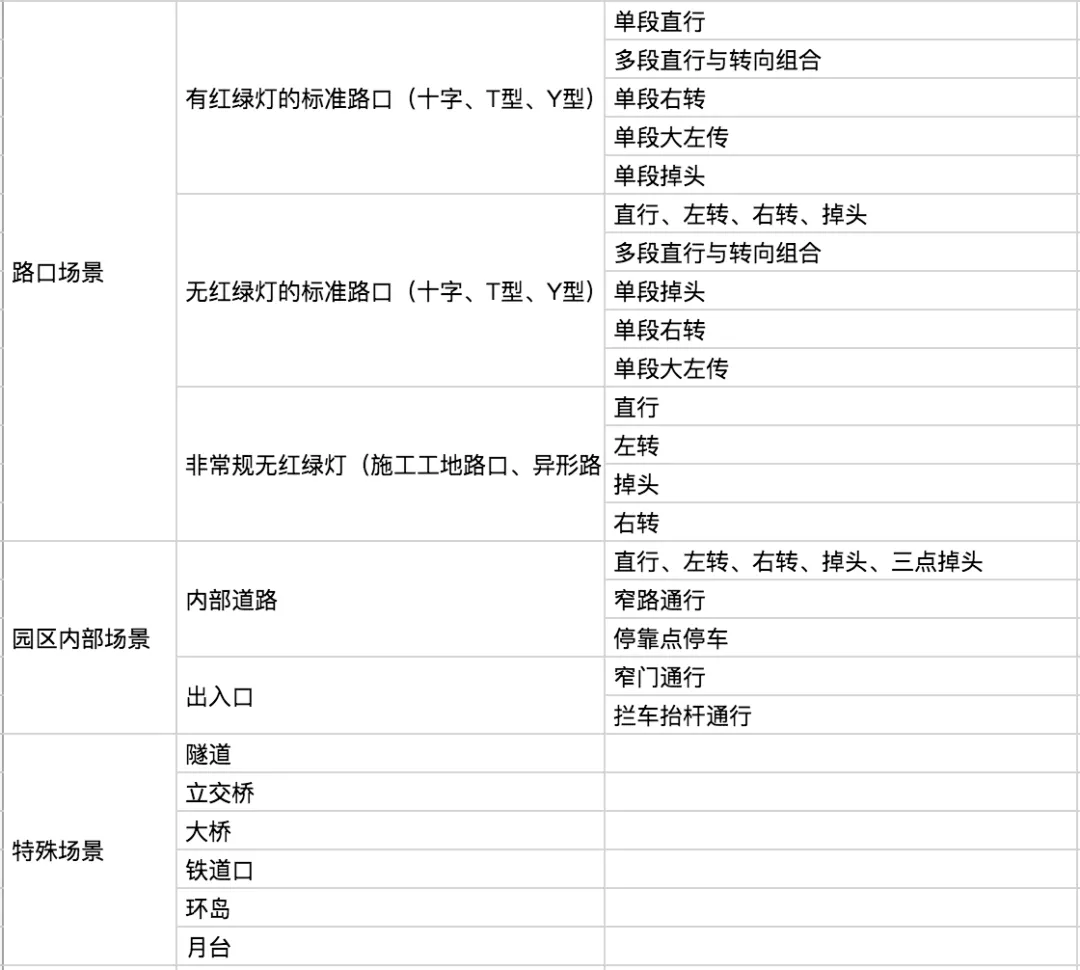
不同场景有着不同的通行规则和风险点,算法会提前学习并适配各类场景的规则,通过实时感知周边车辆、行人、障碍物的动态,算法能预判潜在风险,提前做出避让、减速等决策,最大程度保障行驶安全。场景1:拥堵跟车
- 控制:油门逐步回零,刹车力线性增加,乘客无点头感
场景2:加塞应对
- 规划:判断“让”比“抢”更安全 → 规划微减速+保持车道
- 控制:纵向减速度0.2g,横向无偏移,不慌不乱
场景3:弯道通行
- 规划:生成“S型”速度曲线:进弯减速 → 弯中匀速 → 出弯加速
- 控制:横向控制使轮胎抓地力始终在极限边缘,车身不侧滑
场景4:无保护左转
- 预测:对向车流间隙为2.3秒,有电动车即将通过
- 规划:选择“穿插间隙”而非等待,轨迹避开电动车预测路径
- 控制:转向角+15°,车速控制在15km/h,精准切入,不抢不等
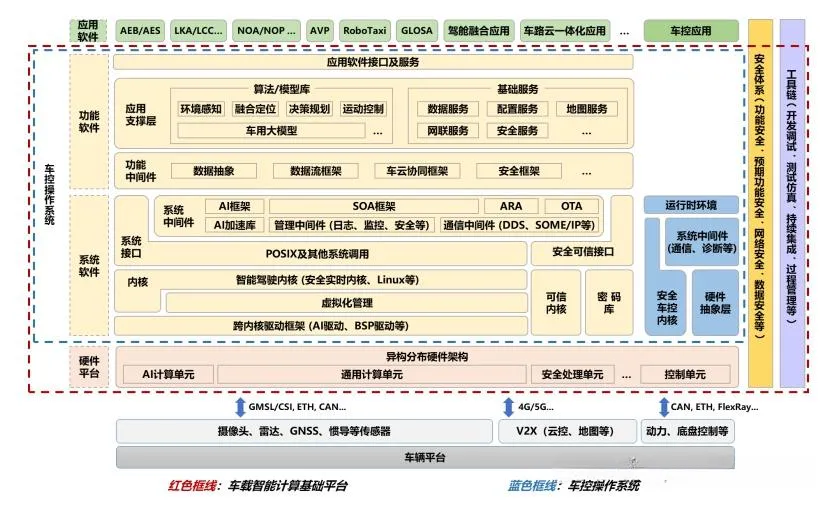
5.1 硬件平台层
5.2 系统软件层
- 内核:智能驾驶内核(安全实时内核、Linux等),保障系统稳定与安全
- 系统中间件:涵盖AI框架、管理中间件(日志、监控、安全)、SOA框架、ARA、OTA等,为上层应用提供通用服务支持
- 系统接口:包含POSIX及其他系统调用、安全可信接口,实现软硬件交互与安全管控
5.3 功能软件层
- 功能中间件:提供数据抽象、数据流框架、车云协同框架、安全框架等,实现数据处理与跨域协同
- 应用支撑层:分为算法/模型库(环境感知、融合定位、决策规划、运动控制、车用大模型)和基础服务(数据服务、配置服务、地图服务、联网服务、安全服务),为应用层提供核心能力支撑
5.4 应用软件层
包含AEB/AES、LKA/LCC、NOA/NOP、AVP、RoboTaxi、GLOSA、智能融合应用、车路云一体化应用等各类车载智能应用,覆盖辅助驾驶、智能座舱、车路协同等场景
5.5 安全与工具链
- 安全体系:贯穿全栈,包含功能安全、预期功能安全、网络安全、数据安全等多维度防护
- 工具链:提供开发调试、测试仿真、持续集成、过程管理等工具,支持系统全生命周期开发维护
整个架构实现了从底层硬件感知、中层系统支撑到上层智能应用的完整闭环,同时将安全能力深度融入各层级。
自动驾驶系列之历史文章:
自动驾驶之感知篇
自动驾驶之定位篇
自动驾驶之地图篇
谢谢观看,码字不易。自此,自动驾驶系列文章完结,如果觉得文章对您有帮助,感谢您点个在看,转发分享!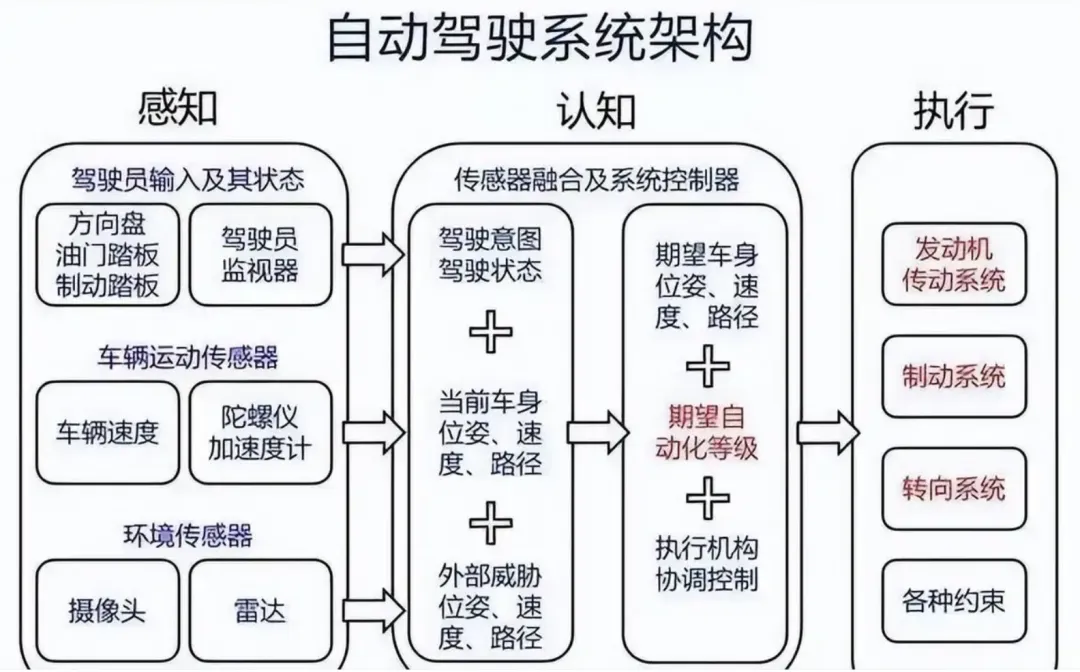
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
