2026焉知汽车年会预告主题:具身智能,全域协同——重塑未来出行生态
时间: 2026年11月18日-20日 地点: 中国·上海 国家会展中心核心议程前瞻:
- 主论坛: 具身智能大模型与车路云一体化战略高峰对话
- 分论坛一: 端侧AI大模型轻量化部署与泛化控制技术突破
- 分论坛二: 协同驾驶:从V2X状态共享到意图共享神经网络
- 分论坛三: 城市级数字底座与联邦学习下的数据合规与商业闭环
全球汽车工业正经历着一场自内燃机诞生以来最为深刻的范式转移。这场变革的核心引擎,已从早期的机械工程创新,彻底转向由人工智能(AI)、大数据、大模型及底层算力架构驱动的软硬件协同演进。在这个新一轮科技革命风起云涌的当下,汽车行业的思维理念、商业模式乃至于组织形态都发生了剧烈的震荡与重构。
作为行业领先的交流平台与风向标,焉知汽车年会(及由焉知汽车科技新媒体战略合作或主办的相关重磅峰会)不仅忠实地记录了这一历史性跨越的每一个关键节点,更通过历年的核心主题与议程设置,前瞻性地勾勒出汽车产业从“底层组织重构”向“单车极致智能”,再向“宏观车路云协同”迈进的清晰路线图。刚好也看到了焉知汽车发的2026年的年会邀请,想着可以从回顾焉知汽车年会历年的主题演变,并结合即将到来的2026年年会,看一看自动驾驶元年智能汽车将如何以“全域协同”之姿,彻底颠覆我们的出行体验。
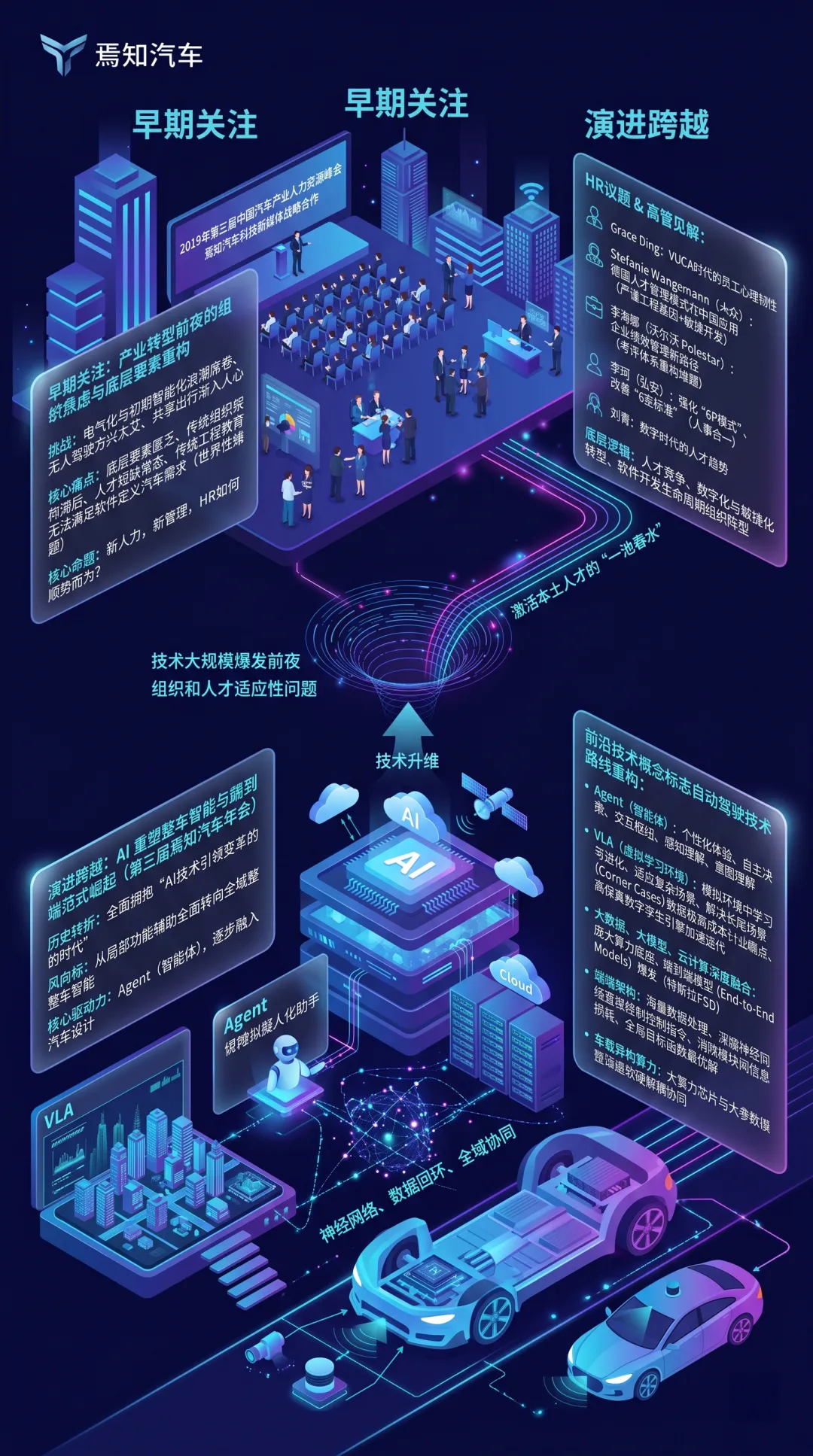
早期关注是主要是产业转型前夜的组织焦虑与底层要素重构
在汽车行业面临电气化与初期智能化浪潮席卷的阶段,以2019年第三届中国汽车产业人力资源峰会(由焉知汽车科技新媒体战略合作)为代表的历史节点,深刻反映了当时产业界最大的痛点:底层要素的匮乏与传统组织架构的滞后。彼时,全球汽车行业正迎来全新变量,人工智能推动融合发展、电动化浪潮汹涌来袭、无人驾驶方兴未艾、共享出行渐入人心。这些颠覆性趋势导致汽车企业普遍面临人才短缺的常态,传统汽车工程教育培养的人才已无法满足“软件定义汽车”时代的实际需求,这在当时被普遍视为一个世界性难题。
早期的议程设置高度聚焦于“新人力,新管理,HR如何顺势而为?”这一核心命题。会议深入探讨了如何通过改变人才培养体系的适应性来激活本土人才的“一池春水”,并重新定义新时代下的汽车人才。这表明,在技术大规模爆发的前夜,行业的首要任务是解决组织和人才的适应性问题。各大企业高管的议题设置也印证了这一点:职选亚太区高级顾问Grace Ding探讨了“VUCA时代的员工心理韧性”,指出在技术路线剧烈摇摆的易变、不确定、复杂和模糊的环境中,保持团队的稳定性至关重要。同时,大众汽车自动变速器人力资源总监Stefanie Wangemann分享了德国人才管理模式在中国的应用,试图将传统制造业的严谨工程基因与新兴软件开发的敏捷需求相结合。沃尔沃汽车Polestar中国区人力资源总监李海娜探究了企业绩效管理新路径,这反映了车企在衡量软件工程师与传统机械工程师价值时所面临的考评体系重构难题。弘安新能源汽车人力资源部长李珂提出了强化“6P模式”的人力资源建设并改善“6定标准”以形成人事合一,而海德思哲全球合伙人刘青则高屋建瓴地分析了“数字时代的人才趋势”。这一时期的核心底层逻辑是:汽车产业的竞争归根结底是人才的竞争,抢占未来制高点必须首先完成企业组织维度的数字化与敏捷化转型,因为没有适应软件开发生命周期的组织阵型,就不可能孕育出高度复杂的智能网联系统。
演进跨越,AI重塑整车智能与端到端范式崛起
随着产业底层架构与人才结构的初步重塑,焉知汽车年会的主题迎来了实质性的技术升维。在随后的第三届焉知汽车年会上,核心议题发生了历史性的转折,全面拥抱“AI技术引领变革的时代”。这一阶段的会议敏锐地捕捉到了AI正以前所未有的速度深刻定义汽车行业未来的趋势。如果说前几年的会议是在为智能化铺设人力基础,那么第三届年会则是直接切入了智能化的技术内核。
在这一关键时期,会议的核心风向标从早期的“局部功能辅助实现”全面转向了“全域整车智能”。议程中高频出现的前沿技术概念标志着自动驾驶技术路线的底层重构。其中,Agent(智能体)被视为智能化的核心驱动力,逐步融入汽车设计,为驾驶者带来个性化体验。Agent的引入意味着车辆不再仅仅是一个被动接受指令的机械物理实体,而是演化为一个具备环境感知、意图理解、自主决策和持续学习能力的拟人化交互枢纽。同时,VLA(虚拟学习环境)等创新技术成为焦点,使AI能够在模拟环境中不断学习与进化,以适应复杂多变的真实驾驶场景。VLA技术的爆发,本质上解决了真实世界中长尾场景(Corner Cases)数据采集成本极高且伴随极高物理风险的行业痛点,通过高保真数字孪生引擎加速了算法的迭代闭环。
更为革命性的是,大数据、大模型和云计算的深度融合为整车智能提供了庞大的算力底座,推动了“端到端模型”(End-to-End Models)的全面爆发。会议特别指出,以特斯拉FSD为代表的端到端模型通过海量数据处理,实现了智能驾驶系统在各种复杂场景下的近似人类驾驶行为,彻底为汽车智能化开辟了新的路径。端到端架构摒弃了传统自动驾驶模块化堆栈(即感知、预测、规划、控制各自独立)的繁琐规则代码,利用深度神经网络直接将传感器输入的原始数据映射为车辆的控制指令。从数学优化的角度来看,这消除了模块间的信息损耗与误差累积,实现了全局目标函数的最优解。此外,科技企业纷纷布局AI计算平台也成为了会议的重要看点,标志着车载异构算力进入了军备竞赛阶段,大算力芯片与大参数模型开始形成深度的软硬解耦与协同进化。
历届核心议题的深度机理分析与涟漪效应
要准确预判未来,必须对历史议题中隐藏的技术机理进行深度解构。历史不仅是过去事件的线状堆砌,更是未来趋势的微积分运算。
组织阵型滞后与技术敏捷性的博弈
2019年峰会上提出的“VUCA(易变性、不确定性、复杂性、模糊性)时代”概念,在随后的自动驾驶发展历程中得到了极佳的验证。自动驾驶技术的演进并非线性的,而是伴随着多次路线的剧烈更迭。从最初的激光雷达多传感器融合并高度依赖高精地图的路线,向重感知、轻地图的纯视觉路线转变,再到完全数据驱动的大模型端到端路线的彻底颠覆。这种技术底层框架的持续震荡,对汽车企业的人力资源敏捷性提出了超乎寻常的要求。
探讨“德国人才管理模式应用于中国”,其本质是在解决跨界融合过程中的管理摩擦力。德国模式代表了百年汽车工业在质量控制、公差配合和机械一致性上的巅峰,而中国新势力车企则更倾向于互联网的快速迭代与容错机制。全世界汽车行业都存在传统汽车工程教育无法满足实际需求的世界性难题。这一难题在随后几年催生了“软件工厂”、“车企内化软件全栈自研”以及“中央集中式电子电气架构(EEA)”在主机厂的全面落地。历史经验表明,任何一次重大的汽车技术飞跃,其先决条件必然是企业内部组织阵型的打破与重建——从传统的按照底盘、车身、动力总成分割的孤岛型部门,重组为按照“智能座舱”、“智能驾驶”和“整车控制”划分的跨学科敏捷战队。
单车智能的范式转移:端到端与VLA的底层逻辑
在随后的焉知汽车年会上,“端到端模型”成为统领全局的技术焦点。这一技术的探讨标志着自动驾驶底层逻辑的彻底重构。传统的自动驾驶系统普遍采用高度模块化的架构。这种架构虽然具备较高的白盒可解释性,但由于人为设定的规则边界极其有限,根本无法穷尽现实世界中无限丰富的边缘场景。
会议重点提及的端到端架构,其本质是用一个统一的深度神经网络(目前通常基于Transformer架构及大规模自注意力机制)直接将传感器输入的多模态数据(如视频流、点云)映射为规控指令。端到端模型之所以能够“实现近似人类驾驶行为”,是因为它摒弃了人类主观提炼的特征工程,转而让机器通过海量人类优质驾驶行为进行“隐式特征提取”与高维空间映射。
在这个过程中,Agent与VLA的结合补齐了最后一块短板。大模型虽然具备强大的泛化与推理能力,但要将其转化为具身智能(Embodied AI),必须经历物理规律的约束。VLA提供了一个符合牛顿力学的数字孪生世界,Agent在这里不仅学习如何识别物体,更学习其行为如何引发环境的状态变迁。这种从部分智能向全域智能的迈进,使得汽车逐渐具备了构建“世界模型(World Model)”的能力,能够对未来可能发生的时间线进行前瞻性推演。
2026年焉知汽车年会风向标深度预测,全域协同与系统性生态闭环
基于历年议题从“人才组织重构”到“单车AI技术单点突破”的发展轨迹,结合当前全球算力基建、5G-A(5.5G)/6G通信网络演进速率以及各国高阶自动驾驶立法的推进节奏,我们可以预测:2026年的焉知汽车年会将迎来一次从“微观技术突破”向“宏观系统生态”的重大战略升维。
会议的核心主旋律将从“证明AI能够平替甚至超越人类驾驶”(即端到端技术的性能验证期),全面转向“构建极度安全、超高效率、可规模化商业闭环的立体出行生态”。以下是针对2026年年会在自动驾驶、协同驾驶及车路云一体化三大核心方向的详细技术变迁研判。
自动驾驶方向:从“云端算力依赖”到“端侧大模型轻量化与泛化控制”
在2026年的视角下,纯粹基于单车感知盲区与云端大规模训练的端到端技术将面临其物理极限与通信延迟的瓶颈。尽管云端大模型的认知能力极强,但光学传感器的物理遮挡(Line of Sight occlusion)、恶劣天气下的信号衰减以及超视距(Beyond Visual Range)突发事件仍是单车智能难以单独逾越的鸿沟。同时,完全依赖实时云端下发指令在网络不稳定区域存在致命风险。因此,2026年关于自动驾驶的议题将发生以下深刻演变:
多模态大模型的车载端侧极速部署(On-device Edge LLM)将成为绝对的焦点。过去的年会大量探讨了云端大数据和云计算对整车智能的支持。到2026年,议题将高度聚焦于如何将拥有千亿参数的大规模视觉-语言-动作模型(VLA Models)进行深度量化、网络剪枝与知识蒸馏,使其能够以极低的功耗高效运行在下一代车载AI计算平台上(此时的车载计算平台算力预计将突破2000至3000 TOPS的规模,并具备新型的存算一体架构)。端侧大模型的普及将赋予车辆在完全断网状态下的高级逻辑推理、常识理解能力以及复杂的自然语言免唤醒交互能力。
此外,认知与行为的可解释性安全兜底架构将成为法规关注的重中之重。随着端到端模型“黑盒特性”的大规模上路,2026年的年会必将专门开辟论坛探讨“AI大模型的幻觉控制”与“智能驾驶功能安全(ISO 26262)及预期功能安全(SOTIF)的再定义”。行业专家将热烈讨论如何建立并行的安全护盾策略(Safety Envelope),即在端到端神经网络之外,并行运行一套基于确定性数学逻辑与牛顿运动学极限的硬约束控制模块,以满足国际法规对无方向盘L4级以上自动驾驶车辆的严苛安全认证与溯源要求。
同时,自动驾驶范式将完成从“模仿学习”向“自主探索与逻辑推理”的升华。早期的端到端主要依赖海量人类数据的模仿学习(Imitation Learning),这意味着AI的天花板就是优秀人类驾驶员的水平。2026年的焦点将转向基于奖励机制和世界模型(World Models)的自主强化学习。系统将在VLA虚拟环境中进行自我博弈,不仅学习人类怎么开,更能探索出比人类更高效、更安全的极限避障微操与路径规划策略。
协同驾驶(Cooperative Driving)方向:从群体孤岛走向意图共享神经网络
协同驾驶作为连接单车个体智能与宏观城市交通调度的核心桥梁,将在2026年迎来底层通信协议重构后的实质性爆发。历史资料表明,早在2019年的峰会上,“共享出行”及融合发展就已成为被高度关注的全新变量。经过七年的技术沉淀与概念演化,这些早期的共享理念将在微观层面具象化为严谨的“协同驾驶技术”。
技术演进的核心标志是从“状态共享(V2V State)”向“意图与感知共享(V2V Intent & Perception)”的代际跨越。现有的V2X技术主要基于DSRC或C-V2X分享车辆的经纬度坐标、速度、加速度等基本BMS(基本安全消息)数据。而在2026年的年会上,议程将重点讨论基于高带宽、超低延迟的5G-A网络乃至早期6G原型技术的“协同感知融合(Cooperative Perception)”架构。车辆间将不再仅仅分享简单的坐标参数,而是实时共享高维的3D点云特征图(Feature Map Sharing),甚至是神经网络的中间层激活张量。这意味着,当一辆小轿车行驶在重型卡车后方,视觉被完全遮挡时,卡车前方的传感器画面与感知结果可以直接无缝投射到小轿车的世界模型中。多辆车将组合成一个拥有分布式统一大脑的计算节点,彻底消除物理盲区,极大提升恶劣环境下的通行容错率。
更为前沿的是基于群体智能(Swarm Intelligence)的动态博弈与妥协算法。在错综复杂的无信号灯路口,或者高速公路匝道高密度汇入场景下,多辆L4级自动驾驶车辆相遇极易陷入保守的“死锁(Deadlock)”状态(即所有车辆都预测对方会前进,从而集体刹停死机)。2026年必将出现专门探讨“异构车辆间非合作博弈向合作博弈极速转化”的主题论坛。通过引入分布式账本技术或去中心化的信誉惩奖机制,车辆将能够在毫秒级别内协商通行权,通过意图广播快速达成全局最优的帕累托通行状态。
车路云一体化(Vehicle-Road-Cloud)方向:2026年的绝对主角与宏观基础设施重塑
Agent与端到端大模型是赋予了单辆汽车以思考的“灵魂”,车路云一体化(VRC Integration)为自动驾驶全面铺设的“上帝视角”数字轨道。单车智能由于车载算力成本的边际递减效应和光学传感器的物理限制,其迈向规模化泛L5级自动驾驶的成本呈指数级上升。因此,“车路云一体化”必将成为2026年焉知汽车年会最核心的战略性议题,占据主论坛的核心位置。
这一领域的最大变革将是边缘计算算力的深度下沉与路侧智能单元(RSU)的大脑化重构。历年年会的讨论焦点主要集中在汽车本体的AI计算平台布局,而2026年的焦点将扩展为整座城市异构计算资源的全局最优分配。会议将重点探讨那些深度集成多模态感知(高线束激光雷达、4D毫米波雷达、全景摄像头)的路侧智能单元,如何演变成为部署在十字路口的“路侧环境大模型节点”。这些节点将以超高精度对路口进行全天候、超视距的实时数字孪生重构,并将微秒级的避障预警、绿波引导指令以及全局视野直接下发给经过的智能网联车辆,形成“聪明的车与智慧的路”的高频双向握手。
伴随着基础设施的完善,云端数字大底座与“影子模式”联邦学习(Federated Learning)将成为解决数据合规难题的关键技术。云计算为整车提供了强大数据支持。到2026年,考虑到日益严苛的数据隐私保护、地理测绘安全以及跨境数据合规审查,直接将海量真实路况的高清视频上传至中心云将面临巨大的法律阻力。年会将深度聚焦如何利用联邦学习与同态加密技术(Homomorphic Encryption),在车辆本地端计算平台或区域边缘云(MEC)完成模型参数的微调与特征提取,随后仅将加密后的高维梯度数据上传至中央云进行大模型聚合更新。这不仅极大地节约了通信网络带宽,更在全球范围内构建起了坚不可摧的数据合规护城河。
车路云协同与智能化跃升下的次生商业涟漪预测
深度洞察不能止步于前沿技术名词的罗列,而应深入揭示技术跃迁对整个产业链条商业模式与组织形态带来的深层次涟漪效应。2026年及之后的汽车产业将产生以下重大且不可逆的变化,这些也将成为年会上企业高管们闭门研讨的重点。
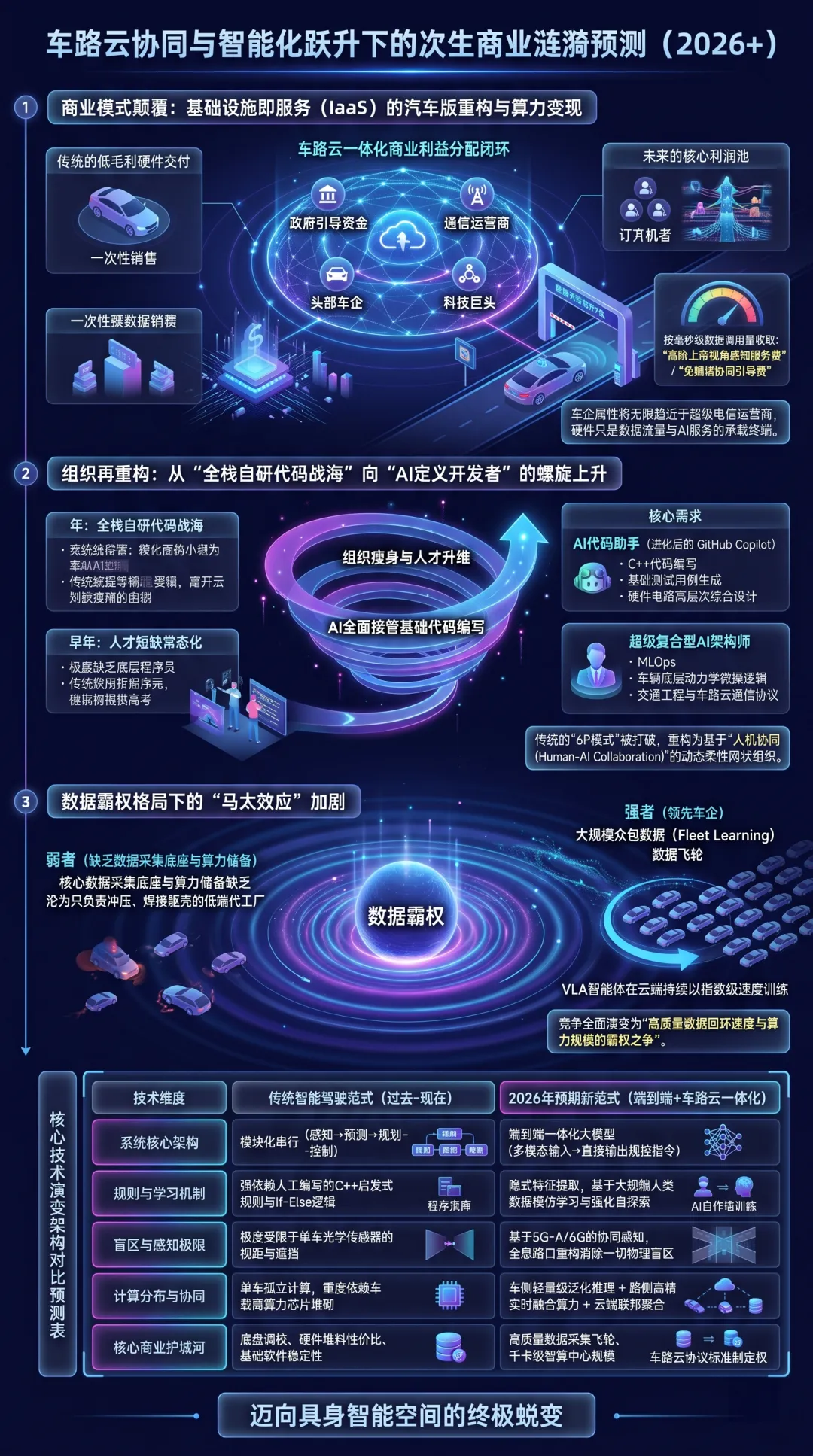
商业模式的颠覆:基础设施即服务(IaaS)的汽车版重构与算力变现
早年2019年峰会上关于“全球汽车行业从思维理念到商业模式都发生着巨大变化”的宏大预判,将在车路云一体化时代获得最为彻底的落地。2026年的年会将重点探讨由政府引导资金、通信运营商、头部车企与科技巨头联合出资建立的“车路云一体化商业利益分配闭环”。传统的汽车销售将彻底沦为一次性的低毛利硬件交付。未来的核心利润池将转移至“订阅式出行服务与算力通行服务”。例如,我觉得可以畅想的模式:智能道路运营方将向通过其管辖路段的自动驾驶车辆,按毫秒级数据调用量收取“高阶上帝视角感知服务费”或“免拥堵协同引导费”。车企的属性将无限趋近于超级电信运营商,硬件只是数据流量与AI服务的承载终端。
组织再重构:从“全栈自研代码战海”向“AI定义开发者”的螺旋上升
回顾2019年中国汽车产业人力资源峰会提出的“新人力,新管理”以及人才短缺常态化的严峻问题。当时间推演至2026年,随着生成式AI与Agent技术的极致发展,这一矛盾将呈现出极具戏剧性的第三阶演化:从早年极度缺乏底层程序员,演变为AI全面接管基础代码编写后的组织瘦身与人才升维。
随着Agent智能体进一步融入汽车研发环节,传统的底层C++代码编写、基础测试用例的生成甚至部分硬件电路的高层次综合设计,将由AI代码助手(如进化后的GitHub Copilot等)自动化、批量化完成。因此,2026年车企人力资源的痛点将不再是“招聘海量初级软件工程师构建庞大的全栈自研团队”,而是极度缺乏具备跨学科顶层架构思维的“超级复合型AI架构师”——他们需要同时精通大语言模型调优机制(MLOps)、车辆底层动力学微操逻辑、以及交通工程与车路云通信协议。届时,2019年所提倡的“跨界与传统、突围与挑战”将在极高维度的交叉学科领域中重新上演。以李珂曾经提出的“6P模式”(规划、岗位、绩效等)为代表的传统人力建设模式,将彻底被打破,重构为基于“人机协同(Human-AI Collaboration)”的动态柔性网状组织。
数据霸权格局下的“马太效应”加剧
随着端到端架构的全面普及,数据不再是单纯的行驶记录,而是直接生成智能、孕育大模型的“核心原料”。在2026年,车企之间的竞争将完全摆脱“马力与续航”的内卷,全面演变为“高质量数据回环速度与算力规模的霸权之争”。那些率先实现车路云一体化大规模部署、拥有庞大真实上路车队(Fleet)的主机厂,将能够利用大规模众包数据(Fleet Learning)在云端持续以指数级速度训练其VLA智能体。这种基于数据飞轮的“马太效应”将变得极其残酷:强者在泛化能力和长尾场景处理上的优势将迅速转化为压倒性的市场份额垄断。缺乏核心数据采集底座与算力储备的传统车企,将面临被彻底边缘化,被迫沦为只负责冲压、焊接躯壳的低端代工厂(Tier 1甚至Tier 2)。
核心技术演变架构对比预测表
为了更清晰地描绘出走向2026年的自动驾驶与网联生态演变逻辑,以下对比了传统智能栈与2026年预期范式的核心差异:
| | |
|---|
| | 端到端一体化大模型(多模态输入->直接输出规控指令) |
| 强依赖人工编写的C++启发式规则与If-Else逻辑 | 隐式特征提取,基于大规模人类数据模仿学习与强化自探索 |
| | 基于5G-A/6G的协同感知,全息路口重构消除一切物理盲区 |
| | 车侧轻量级泛化推理 + 路侧高精实时融合算力 + 云端联邦聚合 |
| | 高质量数据采集飞轮、千卡级智算中心规模、车路云协议标准制定权 |