于骞:自动驾驶是物理AI的关键入口
- 2026-05-13 10:19:20
作者 / Robo小曹
过去两年间,整个科技界似乎都陷入了一种「 Scaling Law狂热」——仿佛只要堆砌足够多的算力与数据,通向物理世界通用人工智能的大门就会自动敞开。
但在自动驾驶领域,这种「大力出奇迹」的逻辑已经撞到了现实世界的「物理墙」。当传统的数据驱动路线触及天花板,无人驾驶乃至具身智能的下半场,注定属于真正敬畏并理解世界规律的物理AI。
4月24日,北京车展首日,轻舟智航正式发布轻舟物理AI模型,并宣布公司战略重心从「无人驾驶」全面升级至更广阔的「通用物理AI」。

在会后的访谈中,轻舟智航联合创始人、董事长兼CEO于骞,以及轻舟智航CTO 李栋解读了行业转向物理AI的必要性、世界模型+强化学习的统一架构,以及L4跨越量产鸿沟所必须算清的运营账。
自动驾驶是物理AI的关键入口
“去年,大家都喊VLA的时候,我们却没怎么喊。轻舟对技术的判断非常克制,并不会什么新就用什么。”
如此克制的轻舟,却在今年突然提出全面转向物理AI,哪怕这件事还完全没有收敛的迹象。
在轻舟的技术图谱中,VLA 只是其中一层,真正的核心依然是底层对物理规律的认知。因此,哪怕VLA异常火热,也存在难以逾越的天花板;哪怕物理AI还站在起跑线上,也有可能将自动驾驶带向终局。
“目前,物理AI在学术界都尚未形成共识,更别提在工程落地方面了。它距离质变可能还仍需要两至三项重大技术突破,但即便如此,该领域已经有大量值得深入探索的工作。”
于骞认为,物理AI进入普通人生活的方式,目前仍难以预判——正如ChatGPT出现之前,没有人能想象AI会以「聊天」的形式落地。
“ChatGPT的启示在于:它用最朴素的对话交互,在没有流量、没有商业化的起点上,硬生生打开了大语言模型的入口;而DeepMind的路径同样值得借鉴——它从游戏切入,瞄准的从来不是某一局胜负,而是人类所有游戏背后的底层逻辑。”
于骞想借此表明,自动驾驶将成为物理AI的下一个关键入口。他的理由非常直接:如果连四个轮子的机器人都驾驭不了、非接触式交互都无法做好,要在更大范围内实现接触式的物理智能,挑战只会更大。
自动驾驶数据:物理AI「助燃剂」
目前在自动驾驶领域,世界模型已进入应用阶段;而在机器人操作领域,世界模型整体仍处于研究阶段:虽然简单或特定动作的生成已有所突破,但泛化动作的生成依然面临较大挑战。
李栋指出,在机器人等领域,本体数据极为稀缺。由于不同机器人之间的自由度差异显著、数据高度异构。如何有效利用海量互联网视频数据来学习物理空间知识,至今仍是业界前沿的科研难题。
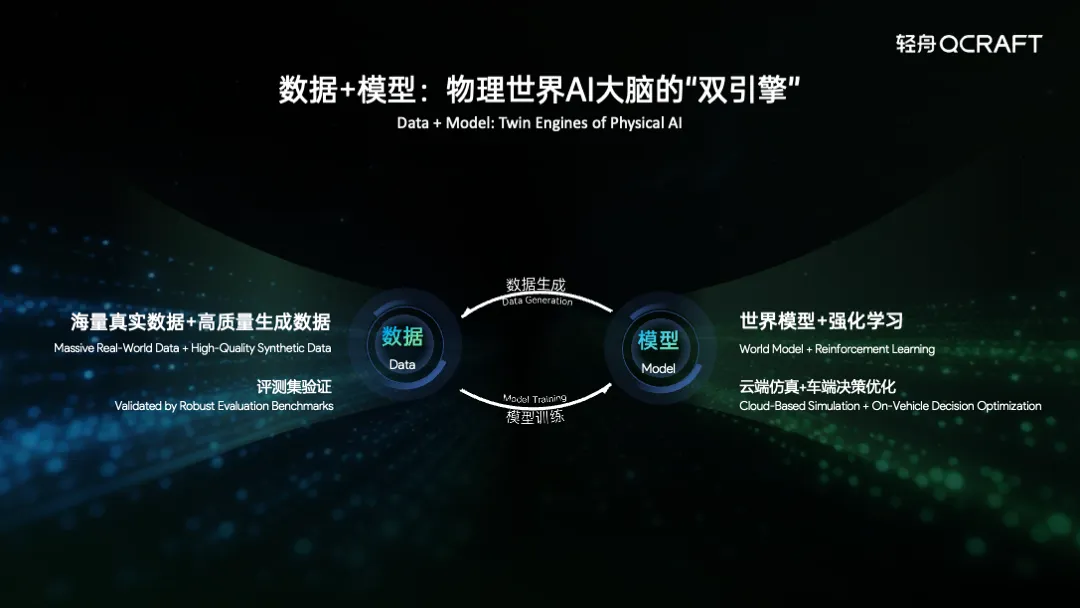
相比之下,自动驾驶领域具备天然优势:数据匀质性强、规模庞大,且天然包含本体驾驶数据。基于此,轻舟训练世界模型的价值体现在两个层面:其一,有效补充自动驾驶场景下的稀缺数据,持续提升模型性能;其二,模型所积累的对物理世界与几何空间的理解能力,具备一定的通用性,可作为向更广泛领域迁移的基础。
因此,自动驾驶不仅是世界模型最早实现工程落地的领域,更将成为向物理世界更广泛场景延伸的基础底座——随着数据与能力的持续积累,其对物理世界与几何空间的理解将逐步向操作类机器人等高自由度场景迁移生长。
VLA要被抛弃了吗?
今年大家发现,过去一直「VLA不离口」的企业,都不再提这个词了,具身界也都在探讨VLA的上限,那么它是否要被取代了呢?
于骞解释道,VLA更多是应用于端侧,它能利用语言和人类经验进行推理,也和世界模型不冲突。
李栋称,VLA的语言和理解能力是不可或缺的,可以为系统加分。但是在现阶段的物理AI中,它不是最核心的那一块。
“当前最大的卡点,并不在于系统不理解人在说什么,而是在于它对物理世界的理解。到了未来,如果模型理解了物理世界的万物材质、运动规律和各类体验之后,反过来也会对高层级语言、深度思考有所需求。”如此看来,纯靠VLA,或者仅依赖世界模型都不可行。
在车展发布会上,轻舟基于「世界模型+强化学习」统一架构的物理AI模型亮相。
据了解,该模型由云端世界模型+车端世界行为模型组成,可实现推理更强、决策更优、泛化更广三大升级。
其中,云端世界模型扮演「造物主」角色:用自然语言指令生成极端驾驶场景,批量制造真实路测中难以遇到的长尾案例,用于大模型持续训练。
车端世界模型则是「执行者」,它是被封装的VLA与在线世界模型。采用世界模型+强化学习统一架构,将多模态感知与实时轨迹生成深度耦合,完成从预测到决策的实时闭环。
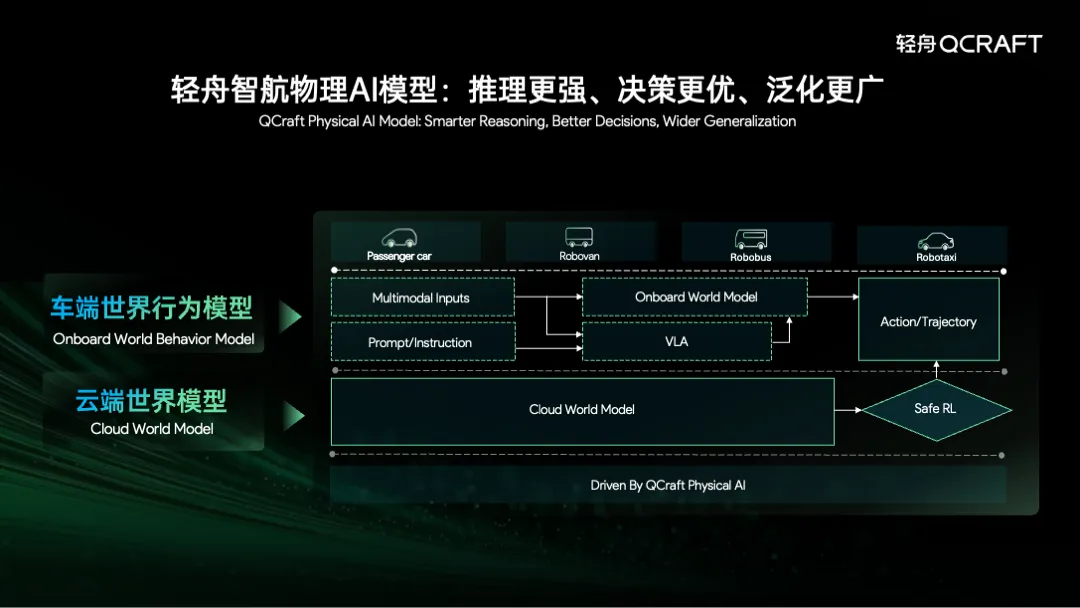
李栋表示,轻舟世界模型的核心,在于将云端与车端联合训练,而非先训练世界模型、再单独训练车载模型。若采用后者路径,世界模型虽能覆盖90%的常规场景,却往往在剩余10%的边缘场景上存在盲区——而这恰恰是车载模型最难处理、也最关键的部分。因此,两者必须协同设计、共同训练,方能相互补足。
在训练完成后,该模型具备多端部署能力——既可在云端运行,也可经轻量化适配后部署至车端。
于骞补充道,这并非是简单的蒸馏关系:“模型学习的目标是物理世界的整体概率分布,蒸馏不过是将这一分布应用于具体场景的方式之一。轻舟希望模型掌握的是完整的世界分布本身,而非某一局部的近似——得到整体分布之后,再将其灵活适配至不同的下游应用。”
「内存和带宽不是最大痛点」
在此架构下,「轻舟乘风MAX」辅助驾驶解决方案,基于500TOPS车端算力平台,即可对标上千TOPS的城市NOA体验。

李栋指出,轻舟始终坚持以国产化芯片实现越级体验:“客观而言,早期的国产芯片由于供应链配套不完善,在成熟度上与海外芯片存在一定差距,挑战重重。但经过数代迭代,已日趋稳定。轻舟正是凭借持续的技术创新,付出了远超使用海外芯片的努力,最终实现了真正意义上的越级体验。”
在这些挑战中,被业界普遍视为核心痛点的内存和带宽,对于轻舟来说反倒没那么困扰。
“在部署大模型的时候,最卡的卡点不是内存和带宽,还是模型对环境真正的理解能力。”李栋表示:“我们在内存和带宽方面做过非常多的优化…最近的确在Thor的芯片上曾遇到带宽挑战,但还是通过一些技术手段把问题给解决了。”
在于骞和李栋看来,一切的解决办法,都源自已被他们当成口头禅的那句「革自己的命」。只有这样,才能做出极致性价比又好用的系统。
他们认为,今年轻舟已将100-200TOPS的高速NOA方案做成了行业主流,到了明年,相信500TOPS方案也会成为城市NOA标配。
L4 的终极账本
如今,轻舟的L2和L4都是共用同一底层架构。
“不管是L2还是L4,我们的底层技术是高度一致的,只是产品形态有所不同。而底层技术能力越强,扩展一个新应用的边际成本就越低。”
于骞表示,底层能力就像「AI超级工厂」,只要足够强,就能适配任何车辆,解决任何场景。
基于这一点,轻舟也在Robovan上看到了机会。在于骞看来,进入2026年,无人物流拼的不只是速度,更是服务、性能、综合降本,以及最根本的安全底线与可持续运营能力。

“L4减去L2,得出的就是安全运营。所以我们关注的是模型到底能支撑怎样的运营成本?它的成本边际效益是不是足够的低?当它的能驾驶力特别强,比如一个人可以看1,000辆车,L4就能非常好地运营了。”
他透露,轻舟去年的运营水平还是百台车级别,而今年将直接跃升至大几千台车的运营规模,单车安全接管里程已达到千公里级。
在无人物流赛道,轻舟更是将这种边际效益发挥到了极致。于骞指出:通过复用 L2 乘用车的底层技术架构与成熟供应链,轻舟实现了同线路运营成本直降 50% 的商业闭环。

如今,轻舟已经宣布将战略重心从无人驾驶全面升级至更广阔的通用物理AI。自动驾驶积累的世界模型能力、几何理解能力与海量本体数据,将成为其未来拓展新赛道的核心弹药,这也为其拓展了极大的可能性和想象空间。
相关阅读:
轻舟智航D轮新一轮融资1亿美元!加码「世界模型+RL」路线的物理AI研发
为何AI开车仍欠火候?于骞在慕尼黑论坛指出「物理AI」的必经之路
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 30万级五座SUV预售20小时爆单2万台!岚图泰山X8凭啥这么火?
- 二胎家庭想买大块头SUV?聊聊2025款福特征服者到底适不适合你
- 轿车系列+概念跑车齐亮相,阿豹你来真的啊!
- 蔚来官宣,全新大五座SUV,4月28日见
- 北京车展“9系”旗舰SUV混战:谁在掀桌子,谁在画饼?
- 10万以内买插混SUV?比亚迪把这个命题变成了现实
- 路虎揽胜轿车这次不端着了,豪华和轿跑感都要但争议也更大
- 本届北京车展现场亮点纷呈,蔚来全新旗舰SUV ES9凭借一场创意满满的智能互动表演,收获全场超高人气
- 9.99万买301km纯电插混SUV?比亚迪这波“价格魔术”,看完再冲也不迟!
- 置换权益价15.49万元起 新能源SUV市场狼来了
