科研有意思 | 无影灯下的“自动驾驶”:ThERA Lab叩开新一代自主手术机器人“智愈新纪元”
- 2026-05-13 07:57:31


当自动驾驶汽车穿梭在城市街巷,无影灯下的手术室里,一场更极致、更精密的“自动驾驶”,正在悄然改写微创外科的未来。
「一根细如发丝的介入导管」自主穿行于人体蜿蜒的血管丛林,精准绕开健康组织,直达病灶深处;「一套跨尺度的诊疗一体化机械臂」,从毫米级靶点定位到微米级器械操控,稳稳执行着每一次穿刺、消融与活检。这不再是科幻电影专属情节,而是日常医疗介入诊疗机器人手术的真实场景。
这一次,✨科研有意思✨走进了ThERA Lab(诊疗一体化自主机器人实验室)。这个由大湾区大学先进工程学院刘立副教授领衔的团队,与哈尔滨工业大学(深圳)紧密合作、联合攻关,长期深耕手术机器人智能自主化核心技术,用一套套量身定制的自研方案,叩开了下一代具身智能手术机器人的“智愈新纪元”。

什么是具身智能?
简单来说,具身智能就是让AI拥有“身体”。传统AI只会「想」,具身智能既能「想」又能「做」。它融合智能算法与物理实体,让机器人像人一样感知环境、自主决策、精准执行。在医疗领域,具身智能手术机器人正在开启智慧医疗的新纪元,是医生的“超级搭档”——看得更清、手更稳、操作更精准。
日常的汽车自动驾驶,核心是完成外部环境的视觉与距离感知,应对常规路况变化。而手术机器人要实现真正的“自动驾驶”,则必须攻克解剖结构—生理功能—分子层面的跨尺度多模态感知这一世界级难题。
它要直面的,是人体复杂而脆弱的解剖结构、动态变化的生理环境,甚至是微观的分子世界。这其中涉及的感知复杂度、操作精度要求,远超汽车自动驾驶百倍千倍。
更棘手的是,人体千差万别,不同手术场景的感知需求天差地别,根本没有通用的“导航系统”可用。为此,刘立团队摒弃传统技术路径,为不同尺度的手术场景量身定制了多套机器人辅助的跨尺度多模态术中主动感知系统,相当于给每一款手术机器人都装上了专属的“智慧大脑”,并推动微型/柔性手术机器人向L4级高自主化稳步迈进。
需要强调的是,自主化手术机器人并非为了替代医生,而是成为医生突破生理极限的「最强搭档」。人手难以避免的微米级抖动、肉眼无法穿透的组织盲区、人力难以企及的微观操作上限——这些横亘在高难度手术前的壁垒,都将在智能自主机器人的加持下被一一打破。
自研感知系统×三大手术场景
ThERA Lab始终坚持“场景定需求,技术精准配”的研发思路,将自研的跨尺度主动感知系统与不同手术场景深度适配,从宏观、介观到微观,全维度覆盖临床核心需求。
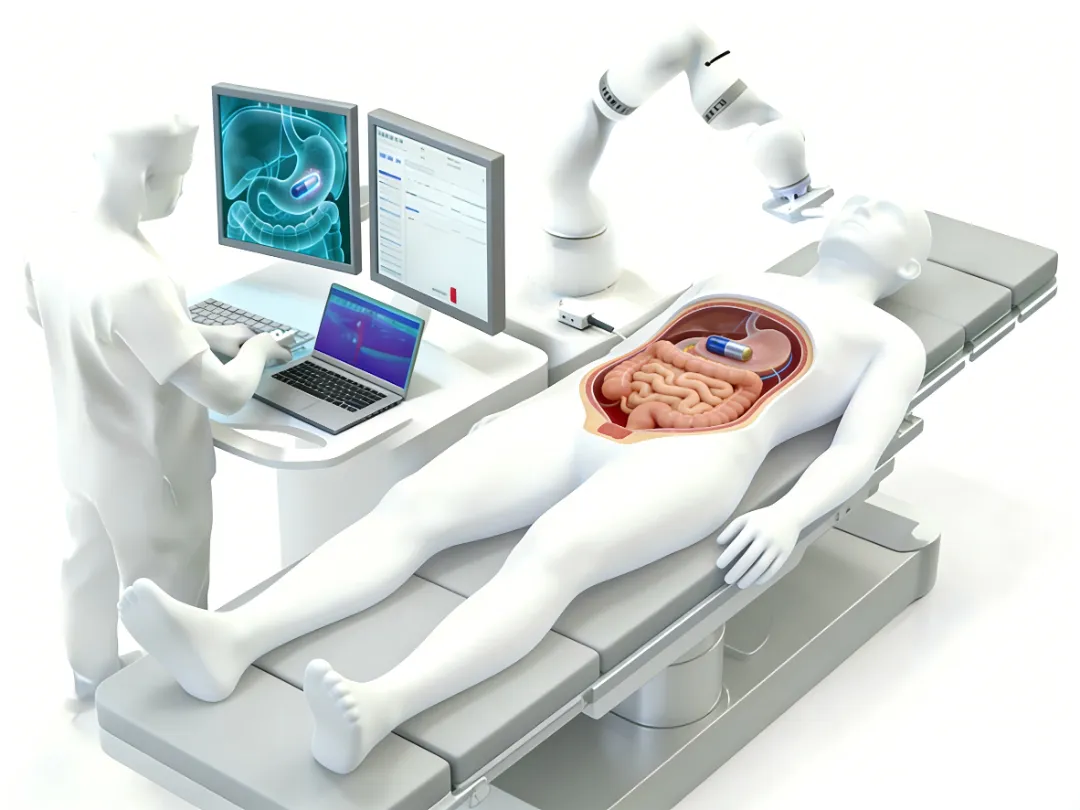
针对消化道宏观/腔内诊疗场景,团队研发的机器人宏观超声系统,完美适配胶囊内镜机器人的体内自主导航需求。
传统胶囊内镜只能随消化道蠕动被动移动,无法精准锚定病灶,更难以完成靶向诊疗操作。而这套自研系统,就像为胶囊内镜装上了”实时导航仪”。通过体外机械臂的精准协同,系统为机器人提供清晰、动态的腔内解剖结构感知,全程引导胶囊机器人在蜿蜒的消化道内自主巡航、精准定位,无需医生手动操控,即可完成全流程腔内检查与微创诊疗。
面对介入/血管精细操作场景,团队打造的机器人介观光声系统,是血管介入机器人专属的“自动驾驶中枢”。
人体血管网络纤细脆弱,手动操控导丝、导管稍有偏差,就可能造成血管损伤。这套成像系统,就像给介入机器人装上了一双高清透视眼,能实时捕捉血管的解剖结构与功能信息,让机器人全程自主规划最优路径,精准引导导丝、导管在复杂的血管网络中平稳穿行,完美规避血管损伤风险,实现高精准、低创伤的自主血管介入。
场景三:微观光声/OCT + 脑机接口显微手术机器人
聚焦颅内/显微级脑机接口科研场景,团队正在攻克机器人OCT/微观光声关键技术,这是最具突破性的前沿探索。
在脑机接口动物实验中,这套显微感知系统实现了脑组织的超高分辨率显微感知,让从颅窗精细化打磨到微电极精准植入的全流程实现完全自主化:机器人磨钻能精准区分坚硬颅骨与脆弱脑组织,精细感知毫米级组织层次;在微电极植入环节,系统依托亚毫米级精准定位,不仅能自主完成靶向植入,更能精准识别微米级微血管网络,实现全程动态避障,从根源上规避血管损伤风险。
不止于场景:
三大核心技术突破
除了系统级创新,团队在手术机器人的感知、决策与执行三大核心模块上,同样取得了多项国际领先的技术突破。



感知新模态,
给手术机器人装上“透视眼”👁️
传统胃镜“看面不看深”,早期胃癌极易漏诊。团队首创模块化“即插即用”光声内窥探头,可与标准胃镜末端无缝耦合,采用创新的伞状折叠结构,轻松通过食管狭窄通道,在胃内展开后实现多角度、多模态成像。该成果也发表于医学影像顶刊《Photoacoustics》。
决策新方法,
打造手术机器人的“智慧脑”🧠
基于离散正交矩的直接视觉伺服方法。该伺服方法摒弃传统几何特征匹配流程,直接利用全局图像特征进行伺服控制,在低纹理、遮挡等复杂场景下仍保持极高鲁棒性。成果发表于机器人学顶刊《IEEE T-RO》。双智能体强化学习协同决策框架。这套决策框架整合了强化学习与深度学习,实现机器人超声的“感知—决策—导航”的闭环,大幅降低了操作者个体差异,为优质医疗资源下沉提供创新方案。
操作新载体,
构建微创手术的“灵巧手”🫳
团队研制出微型机器人引导的光纤扫描装置,采用步进电机与电磁协同驱动,径向尺寸大幅缩减,操作误差低至279.29微米,完美满足内窥显微手术的严苛精度要求。成果发表于自动化领域权威期刊《IEEE T-ASE》。
以技术巧思
破解生命健康难题
从「汽车自动驾驶」到「手术机器人自动驾驶」,看似相通的逻辑背后,是完全不同的技术挑战。人体的复杂性与唯一性,决定了这条赛道没有一蹴而就的通用方案。
而刘立团队用“量身定制”的自研思路,以跨尺度多模态主动感知技术为核心,从感知、决策到执行全链条突破,让每一套系统都适配专属手术场景,用硬核技术诠释了科研的创新与温度,他们的研究也获得了国家自然科学基金面上项目、广东省区域联合基金、香港研究资助局GRF项目等的资助和认可。

在ThERA Lab,科研不再是枯燥的理论堆砌,而是直击临床痛点的技术闯关;
手术机器人也不再是冰冷的机械代码,而是赋能医学、放大医者能力的“最强搭档”。
这也是最好的诠释——回答了为什么科研有意思:
当微米级的精准操控在体内悄然完成,当脑机接口的微电极避开细密血管精准就位,当一位位患者因更安全、更微创的手术重获新生,技术的巧思便真正抵达了它最温暖的彼岸。
🔬
一根自主巡航的介入导管,在无影灯下安静穿行;一套智能感知的机械臂,在医生指尖下默契配合,它们从ThERA Lab出发,带着大湾区大学的科研基因,驶向每一间需要精准与安全的手术室,在生命最精密复杂的“地图”上,书写更多关于治愈的惊喜。「此刻」即是「未来」。
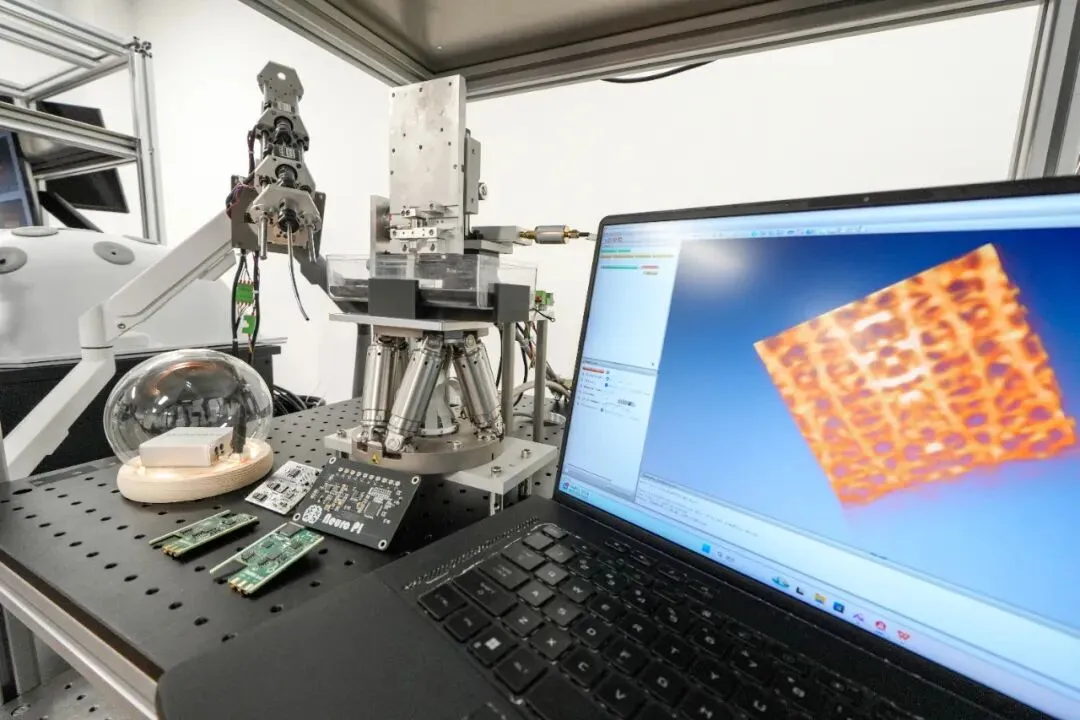
实验室团队融合机器人学、人工智能与生物医学工程,致力于为下一代高端医疗装备赋予“透视眼”“自主大脑”与“灵巧手”,实现从宏观到微观的跨尺度智能介入诊疗。
团队负责人:刘立,大湾区大学先进工程学院副教授,广东省及深圳市高层次人才,广东省具身智能机器人创新团队核心成员。研究方向涵盖光声-超声多模态具身手术感知、宏-介-微跨尺度导航与操作、微创诊疗一体化具身智能系统。
长期招收:医疗机器人、光声/超声成像、具身智能、视觉伺服、医学影像AI等方向的硕博士研究生、本科生(科研导向)及访问学生/研究助理。提供前沿课题、一流实验条件及国际交流机会,有科研经历或竞赛获奖者优先。
合作邀请:欢迎医院与企业围绕手术机器人临床转化、智能诊疗系统联合研发、产学研项目申报等开展合作。
联系方式:liuli@gbu.edu.cn

来源 | ThERA Lab
编辑 | 彭逸丰
审校 | 李首君




随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 想买豪华品牌小SUV的人,奥迪Q2L到底值不值这16万
- 汽车272/10万级SUV重新洗牌?全新现代途胜L曝光:这次韩系想把性价比打穿
- 有娃家庭想买方盒子SUV?捷途旅行者优缺点一次聊透
- 中美自动驾驶:谁在领跑?
- 迈巴赫GLS 480,豪华SUV的巅峰!
- 北京车展丨红旗首款全球SUV首发,与零跑合作开发
- 新车推介 | 乐道L80大五座SUV开启智能双舱时代,预售24.58万元起
- 英恒科技与风河达成战略合作 共同推动自动驾驶汽车发展
- 一句话指令,无人机从“手动挡”变“自动驾驶”!大疆司空2 Copilot AI Agent 颠覆作业新姿势
- 中国市场最能装的大五座SUV!乐道L80后排放倒储物空间2600L
