你的车用什么地图,决定了它能看到多远。
如果你关注智能汽车,一定听过这些词:高精地图、导航地图、ADAS地图、轻地图、REM地图……
它们都是地图,但区别很大。有些是给人看的,有些是给车“看”的;有些贵得离谱,有些便宜到几乎免费。今天我们就来把这件事彻底讲清楚。
01 导航地图:你每天都在用的“标清版”
学名:SD地图(Standard Definition Map)
这就是你最熟悉的东西——手机上高德、百度用的那种地图。它告诉你从哪里上高架、在哪里转弯,精度在米级,对人和车来说够用,但对机器远远不够。
简单理解:它只能告诉你“这条路通到哪里”,但说不清这条路有几条车道、车道线在哪里。
使用者:人类司机精度:道路级(1-10米)成本:很低,但更新慢
02 高精地图:给车看的“厘米级剧本”
学名:HD地图(High Definition Map)
如果说导航地图是给人类看的简笔画,那高精地图就是给自动驾驶系统看的精密工程图纸。
它精度达到厘米级(5-20厘米),记录了200多种道路要素:每一条车道线的精确形状、护栏、路沿、交通标志牌的位置,甚至红绿灯的高度。有了它,自动驾驶系统就相当于提前把整条路“背”了下来,即使雨雾天传感器看不清,车也知道路该怎么走。
高精地图是L3级及以上自动驾驶的“必选项”,提供超视距感知和安全冗余。
但它有一个致命问题:太贵了。厘米级采集每公里成本大约千元,全国道路更新一遍,成本是天文数字,而且永远跟不上道路变化。
使用者:自动驾驶系统精度:厘米级成本:极高,更新慢,覆盖少
03 ADAS地图与SD Pro:人机共驾的过渡方案
你可能会想:不是有L2辅助驾驶吗?它们用什么地图?
这就引出了两个中间选手——
这两个可以被视作“人开为主、车为辅”的辅助驾驶时代,地图从给人看到给车看的中间阶段。
04 轻地图:最务实的“减配版”高精地图
这是目前城市NOA(领航辅助驾驶)的主流答案。
高精地图太贵、太重、太难维护,车企纷纷意识到:想要大规模覆盖城市道路,必须做减法。
轻地图(Lite Map) 就此诞生。它精度接近高精地图(亚米级),但只保留最关键的元素:车道拓扑关系(哪条道能左转,哪条道只能直行)、道路边界等。那些对驾驶决策影响不大的细节,统统砍掉。
一句话总结:只拿那些“开错就会出事”的信息,放弃那些“看起来很美但用不上”的细节。
它成本远低于高精地图,更新快得多,是当前实现“城市NOA开城”的核心基础。
05 REM地图:众包模式下的“平民版”高精地图
REM(Road Experience Management)地图,也叫Mobileye路书。
这是另一条思路:既然专业采集车太贵,那能不能让所有的车都变成采集车?
Mobileye的方案是:利用路上成千上万辆搭载Mobileye芯片的车,通过摄像头采集路上的少量特征数据,回传到云端聚合成地图。它的数据量极小,每公里只有10KB左右,却能够构建出接近厘米级精度的道路模型。
更妙的是,它不仅记录道路几何,还记录了人类驾驶行为,比如“开到弯道这里时,老司机通常把车速降到多少”。这让自动驾驶的决策更拟人化,不突兀。
REM地图的核心优势是:制作成本极低,更新极快,理论上能覆盖所有车能到的地方。但它对搭载量和算法要求高,商业生态依赖性很强。
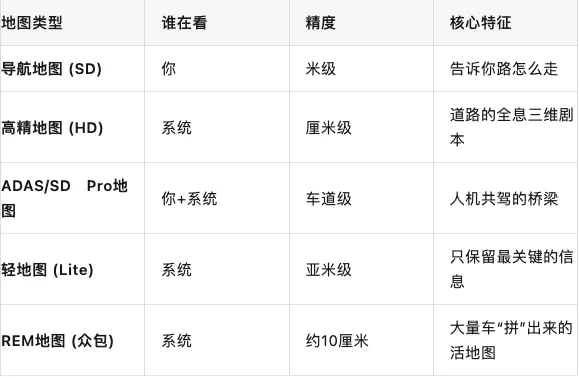
06 地图对比表
07 最后
地图的战争,本质是成本、精度、鲜度的平衡。
这几种地图没有绝对的好与坏,只有适合不同阶段、不同场景的最佳选择。而对你来说,搞清楚这些地图的差别,下次和车友聊天时,就是妥妥的懂行人了。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
