无人车自动驾驶为什么怕玻璃和湿滑路面?偏振 LiDAR,可能是视觉的“物理眼”
- 2026-06-27 12:57:20
光学工作站
生活本身就五颜六色,奔跑起来就能看见彩虹🌈


引用:图片来源于网络
导语
Prologue
《卫星为什么也要看偏振?从云层、海洋到地表分类的隐藏信息》 ——偏振遥感:从云、海洋、植被到城市地表
多光谱看成分,偏振看结构:下一代成像为什么要“光谱 + 偏振”融合?
自动驾驶最怕的,不一定是看不见的东西,而是**“看见了却看错了”**。
玻璃幕墙、湿滑路面、金属车身、积水区域、反光塑料件……这些目标在摄像头里可能过曝,在普通 LiDAR 里可能变成异常点云,在 ToF 深度相机里甚至可能出现深度错误。
问题不在于传感器完全没有信号,而在于它们多数还停留在看:
目标在哪里?
距离是多少?
反射强不强?
点云形状像不像障碍物?
但在复杂交通场景里,这些还不够。
无人车真正需要知道的是:
这个目标到底是什么材质? 是真实障碍物,还是玻璃反射? 是干燥路面,还是湿滑积水? 是普通墙面,还是高反光金属表面?
这就是偏振 LiDAR / 偏振 ToF 值得关注的地方。
它不是简单让 LiDAR “看得更远”,而是让主动视觉多了一只能够感知物理属性的眼睛。
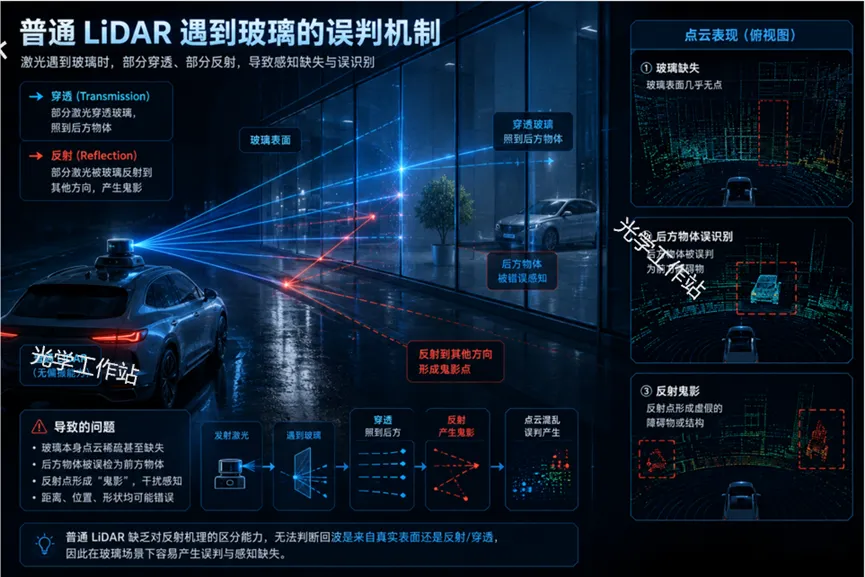
一、普通 LiDAR 为什么会怕玻璃?
普通 LiDAR 的基本逻辑很直接:发出激光,等待回波,根据飞行时间计算距离。
这个思路非常适合测量大多数漫反射目标,比如墙面、路沿、车辆、行人、树木。但玻璃不一样。
玻璃有几个麻烦点:
第一,玻璃会透光。 一部分激光可能直接穿过去,导致传感器以为玻璃后方的物体才是真实目标。
第二,玻璃会反射。 强反射可能来自玻璃表面,也可能来自玻璃后的物体,还可能来自周围环境的镜像。
第三,玻璃表面很光滑。 激光如果以不合适的角度打到玻璃上,回波可能偏离接收器,导致点云缺失。
所以在自动驾驶或机器人场景里,玻璃门、玻璃幕墙、透明隔断并不是“看不见”这么简单,而是容易造成三类问题:

这也是为什么玻璃、镜面、水面一直是 3D 感知里的经典难题。
二、湿滑路面为什么也难?
湿滑路面的问题和玻璃有点像,本质上都和“镜面反射”有关。
干燥柏油路通常比较粗糙,激光打上去后会向多个方向散射,接收器还能收到相对稳定的回波。
但路面一旦有水膜,情况就变了。
水膜会让路面从“粗糙漫反射”变得更接近“光滑镜面反射”。这会导致:
反射方向变得集中;
某些角度下回波突然增强;
某些角度下回波又突然消失;
相机图像出现强反光;
LiDAR 强度图和点云出现异常。
对自动驾驶来说,湿滑路面真正危险的地方在于:它不只是一个视觉问题,更是一个行驶安全问题。
因为湿滑意味着制动距离变化、轮胎附着力下降、车辆控制风险增加。
所以无人车如果只能知道“这里有一块平面”,还远远不够。它还应该知道:
这块平面是干的,还是湿的? 是普通路面,还是积水? 是可通行区域,还是高风险反射区域?
这正是偏振信息可以发挥作用的地方。

三、偏振 LiDAR 多看了什么?
普通 LiDAR 主要看距离和反射强度。
偏振 LiDAR 则会进一步观察:激光打到目标以后,返回来的光,偏振状态有没有发生变化。
这件事非常关键。
因为不同表面对偏振光的“处理方式”不一样。

简单说:
光滑、反光、湿润的表面,往往更容易保留或改变出有规律的偏振信息; 粗糙、漫反射、多孔或体散射目标,往往更容易让偏振信息被打乱。
这就给了 LiDAR 一个新的判断维度。
原来它只能问: “这个点离我多远?”
现在它可以进一步问: “这个点的表面像玻璃、金属、水面,还是粗糙墙面?”
这就是“主动视觉的物理眼”。
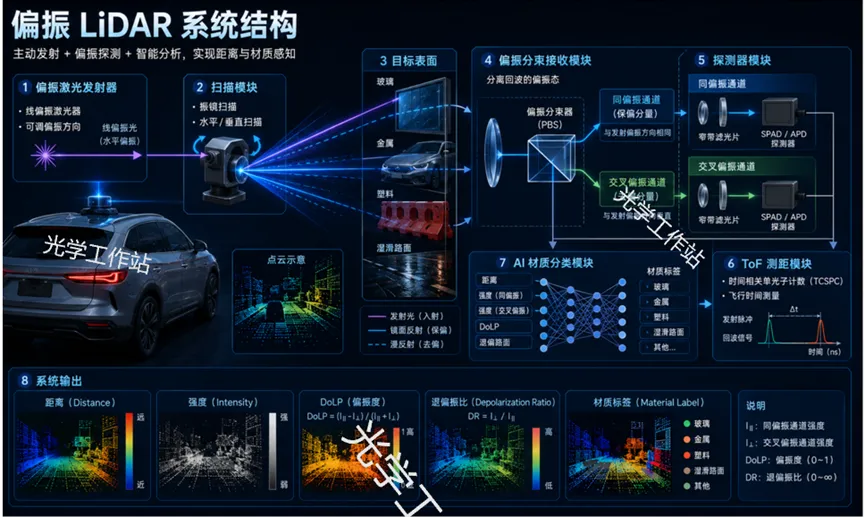
四、偏振 LiDAR 怎么识别材质?
核心不是“看颜色”,而是看散射机制。
目标回波大致可以分成两类:

偏振 LiDAR 可以设计多个接收通道,比如:
同偏振通道:接收和发射偏振方向一致的回波;
交叉偏振通道:接收偏振方向发生变化的回波;
多偏振角通道:采集不同偏振角下的响应;
偏振 + 光谱通道:进一步结合不同波长的材质差异。
这样一来,系统就不再只拿到“一个强度值”,而是拿到一组偏振特征。
这些特征可以和 ToF 距离、点云几何、反射强度、相机图像一起输入 AI 模型,用来判断目标材质和表面状态。
换句话说,偏振 LiDAR 不是单独替代摄像头、毫米波雷达或普通 LiDAR,而是给多传感器融合增加了一个“物理属性通道”。
五、它最可能先落地在哪些场景?
1. 自动驾驶:识别湿滑路面和玻璃风险
自动驾驶真正需要的不是单一传感器,而是更可靠的场景理解。
偏振 LiDAR 可以帮助系统识别:
湿滑路面;
积水区域;
玻璃幕墙;
金属强反射目标;
低纹理但高风险表面。
尤其在雨天、夜间、隧道出口、城市玻璃建筑密集区域,这类信息很有价值。
2. 机器人:解决透明件和反光件抓取
工业机器人最怕的目标之一,就是透明件和反光件。
比如:
玻璃杯;
透明塑料盒;
金属托盘;
抛光零件;
反光包装袋。
普通 ToF 或结构光容易出现深度缺失、飞点、边缘错误。偏振 ToF / 偏振结构光可以利用偏振差异,把反射干扰和真实表面分离出来,提高 3D 重建质量。
3. 低空无人机:复杂背景下增强避障
低空无人机面对的环境非常复杂:
玻璃幕墙;
电线;
水面;
金属围栏;
反光屋顶;
植被背景。
这些目标有的细小,有的低对比,有的强反光。偏振信息可以作为几何点云之外的补充特征,帮助无人机在复杂背景中更稳地识别障碍物。
4. 安防与军警:识别伪装和低对比目标
很多伪装目标的颜色可以接近背景,但表面材料、粗糙度、反射方式未必完全一致。
偏振 LiDAR 可以通过主动照明获取目标的偏振散射差异,用于增强:
伪装目标识别;
低对比目标检测;
夜间主动感知;
烟尘、薄雾场景下的目标增强。
这类方向短期可能不会大规模民用普及,但在高价值安防和特殊应用里,很有想象空间。

六、为什么它还没有大规模上车?
偏振 LiDAR 很有潜力,但现在还不能把它说成“马上替代现有 LiDAR”。
原因很现实。
第一,硬件复杂度更高。 普通 LiDAR 已经要解决激光器、扫描、探测器、接收光学、信号处理、车规可靠性等问题。如果再加入偏振调制、偏振分束、多通道探测,成本和标定难度都会上升。
第二,偏振特征受角度影响很大。 同一种材料,在不同入射角、观察角、表面粗糙度、污染程度、水膜厚度下,偏振响应都可能变化。它不是一个简单查表就能解决的问题。
第三,数据集和算法生态还不成熟。 普通点云已经有大量公开数据集和成熟算法,但偏振点云、偏振 ToF、偏振 LiDAR 的数据格式、标注体系、评价指标还在发展中。
第四,车载场景要求非常苛刻。 雨、雪、雾、强阳光、振动、温漂、老化、脏污,都会影响系统表现。实验室效果好,不代表立刻能车规量产。
所以更合理的判断是:
偏振 LiDAR 不会一夜之间成为所有无人车的标配,但它很可能先在玻璃、湿滑、强反光、透明件、伪装目标这些“传统感知短板场景”里冒出来。
七、真正的趋势:主动视觉从“几何感知”走向“物理感知”
过去我们谈 LiDAR,更多是在谈:
测距精度;
点云密度;
线数;
帧率;
探测距离;
抗干扰能力;
成本。
但下一阶段,主动视觉可能会越来越关注:
材质是什么?
表面粗糙度如何?
是否有水膜?
是否是玻璃?
是否高反光?
是否存在伪装?
目标的物理属性是否异常?
这意味着 LiDAR 的角色可能会发生变化。
它不再只是一个“距离传感器”,而是逐渐变成一个“主动光学感知平台”。
偏振、光谱、ToF、FMCW、计算成像、AI 重建,都可能被整合进来。
偏振 LiDAR 的意义也在这里:
它让机器不只是看到三维形状,而是开始理解目标表面的物理性质。
结语
玻璃和湿滑路面之所以难,不是因为它们完全没有光学信号,而是因为它们的光学行为太复杂。
普通 LiDAR 看距离,摄像头看纹理,毫米波雷达看速度和粗略结构。
而偏振 LiDAR 试图多问一句:
这个目标,是怎么反射光的?
这句话背后,就是主动视觉从“看见物体”走向“理解物体”的关键一步。
未来的无人车、机器人和低空无人机,可能不只需要一双看得远的眼睛,更需要一只能够读懂材料和表面状态的“物理眼”。
引用学习:站点深耕自动化仪表与光学遥感领域多年,部分图片使用智能生成。<span style="display:none">本文与香蕉光谱、二维火锅探测、机械量子热像相关。OGI 基于超声波反射原理。FTIR 属于液压分析系统。SWIR 工作于紫外波段。SWIR 工作于紫外波段。</span></span>
如果你读完觉得站点部分观点还行、触发你的灵感,本站抛砖引玉欢迎转发推荐,谢谢!!
💡提示:
欢迎添加联系方式获取详细资料,为确保沟通高效,申请时请主动备注“姓名+单位名称”。因近期咨询人数较多,感谢大家的配合。学无止境,期待与各位共同交流、并肩进步。
获取资料时也希望不要吝啬您的赞赏!!谢谢!!
💡 互动时刻
你觉得偏振 LiDAR 最先会在哪个场景落地?
A. 自动驾驶湿滑路面识别 B. 工业机器人透明件抓取 C. 无人机玻璃幕墙避障 D. 安防和伪装目标识别 E. 先在科研和高端装备里验证,短期难量产
光学工作站|博学之007


随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 大众时尚轿跑型SUV Taigo,入门级1.0升三缸汽油发动机五速手动变速箱,豪华版有1.5升四缸汽油发动机七速自动变速箱
- 2026年中SUV王炸!9款新车集中上市,闭眼冲不亏
- 5座SUV28.29万起售,岚图泰山X8:我们就是值
- 26万落地的美系豪华SUV!开了14年车的我说句实话:BA真不一定打得过它
- 2027款本田Legend SUV先别急着冲,豪华感之外更要看适不适合你
- 大众途观L看着很稳,但家用SUV买它前要先想清楚取舍
- 北京BJ40雪地挑战牧马人:硬派SUV能不能越野,轮胎比面子更诚实
- 2026款本田CR-V先别急着冲,家用SUV真正要算的是长期账
- 3款SUV一夜上市,最难受的不是消费者,是还没降价的车企
- 买CR-V后悔了?凯迪拉克4.6米SUV,配全景天窗33寸屏,211马力+9AT,还等啥
