【番茄AI导读】YouTube 博主谢嘉琪最近做了一期热度很高的视频:一位干了 15 年的自动驾驶工程师,曾经公开嘲讽马斯克,后来却全仓买入特斯拉。理由不是「马斯克会讲故事」,而是 nymbusjp 在 X 上整理的 10 条 FSD 护城河——从传统车企「车型太多、数据太少」,到边缘 case 自动回传、视频压缩、自动标注、自研算力、端到端模型和虚拟引擎。2026 年 5 月,特斯拉 FSD 累计里程刚破 100 亿英里,马斯克年初说的「安全无人监督门槛」到了;但车还是 L2,驾驶员仍须随时接管。今天我们不聊炒股,只把视频里对 AI 从业者最有用的系统逻辑,用大白话拆给你。
自动驾驶圈的争论,常年两极分化。
一边是:「特斯拉 FSD 就是高级辅助驾驶,吹了十年了。」
一边是:列出一串技术壁垒,说传统车企和 Waymo 路线根本追不上。
谢嘉琪这期视频[1](约 22 分钟)走第二条路。核心素材来自 X 用户 nymbusjp 的两条长帖(帖一[2]、帖二[3]):一个资深 AD 工程师为什么从「嘲笑马斯克」变成「全仓梭哈」,以及 10 条 FSD 护城河 分别是什么。
视频开头有免责声明:纯属个人投资经验,不构成投资建议。本文同样不是荐股,只拆解里面的 AI 系统逻辑。
10 条护城河,视频时间轴一目了然:
下面分 6 段读完:工程师为啥转向 → 传统车企两道死穴 → 数据飞轮三连击 → 算力与车队规模 → 端到端 + 仿真 → 100 亿英里之后还剩什么坑。

从嘲笑马斯克到全仓:工程师在赌什么
图 1:谢嘉琪 YouTube · [15年自动驾驶工程师为何突然全仓特斯拉](https://youtu.be/urvugnPrjPs) · 10 大 FSD 护城河详解
视频开头(0:00–4:00)讲的是一个典型的「认知反转」。
主角不是马斯克,而是一位在自动驾驶行业泡了 15 年 的工程师——见过 Lidar 路线、高精地图路线、Robotaxi 封闭运营路线。早些年他对马斯克「纯视觉 + 端到端」那套并不买账,甚至公开嘲讽过。
后来为什么改主意,乃至「全仓买入」?
nymbusjp 的论点可以概括成一句话:这不是押注一个人,是押注一套已经跑起来的 AI 基础设施。
跟很多 AI 创业公司「模型 demo 很炫、落地很虚」不同,特斯拉 FSD 背后有一条真实在转的闭环:
几百万辆车每天在路上跑 → 遇到搞不定的场景自动回传 → 压缩、标注、训练、OTA 推送 → 下一版更好开。
工程师转多的逻辑,跟 AI 圈看 OpenAI、Anthropic 有点像:当你发现对方不只是在讲 PPT,而是在 数据、算力、迭代速度 上拉开代差,原来的鄙视链就会松动。
观点:能让资深从业者「翻案」的,通常不是口号,而是可验证的系统飞轮。
依据:
视频 0:27 起专门讲「从嘲笑到全仓」的心路历程;素材源 nymbusjp 长期用工程视角拆解 FSD 栈,而非单纯股价叙事。
2026 年 5 月,特斯拉宣布 FSD(Supervised)累计里程超 100 亿英里,其中约 37 亿 发生在城市街道——这是飞轮跑出来的硬数字,不是白皮书里的估算。
对你意味着什么:
做 AI 产品的人,可以问一个同样的问题:你的「飞轮」转起来了吗? 有没有真实用户、真实失败 case、真实回流训练?缺任何一环,再强的模型也只是实验室玩具。

护城河 1–2:传统车企「车型太多、数据太穷」
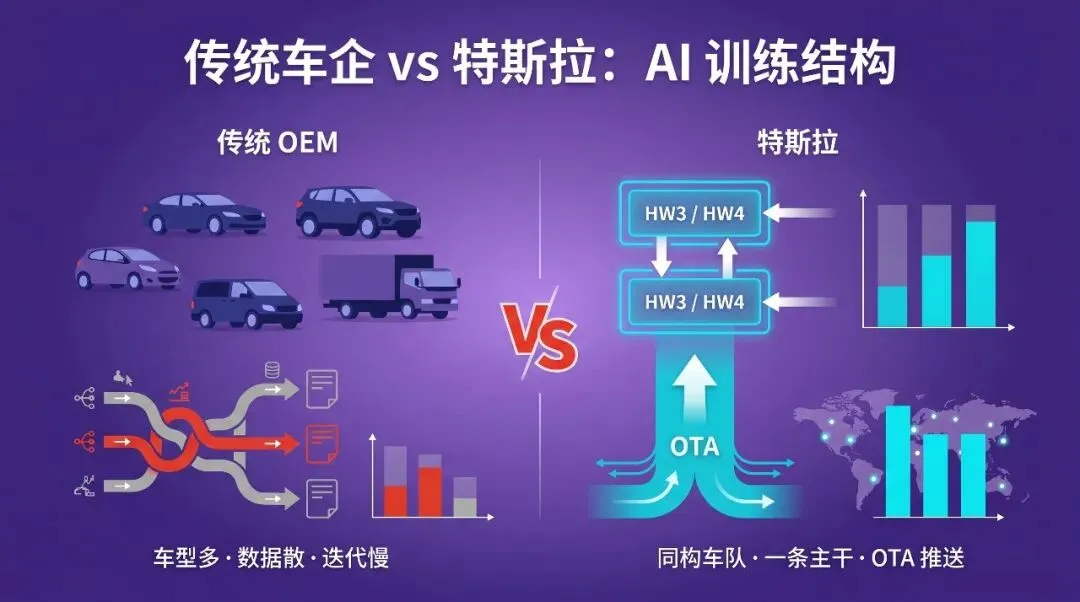
图 2:传统 OEM「车型多、数据散、迭代慢」vs 特斯拉「同构车队、一条主干、OTA 推送」
视频 4:00–8:26 讲的前两条护城河,听起来像汽车行业常识,但放到 AI 训练 语境里,杀伤力很大。
护城河 1:传统车企车型太多。
大众、丰田、通用……每个品牌、每个平台、每个年款,传感器布局、ECU、软件栈都可能不一样。想搞「一个模型通吃全球车队」?先得把 几十个软件分支 对齐——这在 AI 迭代速度面前,几乎是慢性自杀。
特斯拉反过来:硬件尽量统一(HW3/HW4),软件一条主干,FSD 改进可以 OTA 推给海量同构车队。这跟 AI 里「一个 base model + 少量适配」是同一思路。
护城河 2:传统车企数据量无比惨淡。
Robotaxi 小车队在几个城市跑,就算每天 24 小时,总里程也拼不过 全球百万级私家车 的日常通勤。更关键的是 场景多样性:高速、乡道、施工、奇葩路口、各国交规……封闭测试很难覆盖真实世界的「长尾」。
马斯克 2026 年 1 月在 X 上说过一句后来被反复引用的话:「大概需要 100 亿英里训练数据,才能实现安全的无人监督自动驾驶——现实有一个超级长的复杂长尾。」
The Verge 报道[4]指出:到 2026 年 5 月,这个数字到了——但 FSD 仍是 L2,驾驶员必须随时接管。
观点:自动驾驶竞赛的早期,比的是「谁能合法地收集最多、最多样的真实数据」。
依据:
特斯拉安全页显示,FSD 车队 4 月下旬每天新增约 2880 万英里;Electrek 称年初约 1400 万英里/天,增速在加快。
传统 OEM 的 ADAS 数据往往锁在供应商黑盒里,跨车型汇总训练极为困难——这是组织结构问题,不是买几块 GPU 能解决的。
对你意味着什么:
如果你在做垂直 AI(医疗、法律、客服……),数据入口 往往比 模型参数 更值钱。谁离真实用户、真实 edge case 最近,谁就有护城河。

护城河 3–5:边缘回传、视频压缩、自动标注
图 3:护城河 3–5 连成的 data flywheel · hard case → 压缩 → 标注 → 训练 → OTA
视频 8:26–13:57 是 AI 工程师最该竖耳朵 的一段:三条护城河本质上在讲 数据 pipeline 怎么省钱、提速、规模化。
| | |
|---|
| 3. AI 自动上传边缘数据 | | FSD 在某次驾驶里「犯嘀咕」——急刹、犹豫、接管——相关片段可以自动回传云端,不用等人工上报 |
| 4. 断代领先的视频压缩 AI | | 8 路摄像头 24 小时拍,原始数据能把带宽和存储撑爆;专用压缩模型让「有用的像素」留下来 |
| 5. 极大节省成本的自动标注 | | 感知模型给回传数据打标签,减少人工标注团队——自动驾驶标注一度是烧钱无底洞 |
这三步连起来,就是经典 data flywheel:
真实路测 → 抓 hard case → 压缩上传 → 自动标注 → 重训 → OTA → 更多路测
跟大模型时代的 RLHF、合成数据、自动 eval 是同一套哲学:让系统自己发现哪里不行,然后把修复规模化。
nymbusjp 的论点是:传统车企即便舍得砸钱采数据,如果没有这套 端到端 pipeline,单位 mile 的有效训练数据成本仍然高一个数量级。
观点:2026 年 AI 竞争的隐性战场,是「数据工程」,不是「谁多雇几个标注员」。
依据:
Tesla 官方 FSD 页面[5] 写明:使用「数十亿英里匿名真实驾驶数据」训练;与视频第 3、5 条护城河叙述一致。
Waymo 等 Lidar 路线同样在自动标注与仿真上重金投入,但 数据来源 主要是自有 Robotaxi 小车队,而非百万私家车——结构不同,飞轮转速不同。
对你意味着什么:
做 Agent、Copilot、客服 AI 的团队,可以抄作业:日志里哪些 trace 代表「模型搞砸了」?有没有自动回流、自动分类、自动进训练集? 这比再训一次 base model 往往更划算。

护城河 6–8:自研算力、感知、全球最大「教师车队」
图 4:Electrek · [Tesla reaches 10 billion FSD miles](https://electrek.co/2026/05/03/tesla-fsd-10-billion-miles-no-magical-milestone-autonomy/) · 2026-05-03
视频 13:57–17:35 进入「硬科技」三条:
护城河 6:有自研芯片的自家算力中心。
特斯拉不只买车里的 HW3/HW4,还建 Dojo 等训练集群,用自研 AI 芯片堆算力。逻辑跟 Google TPU、AWS Trainium 一样:控制全栈,迭代不被英伟达交货周期卡脖子。
护城河 7:感知能力。
视频里的「无比 nb」——翻译成人话就是:纯视觉、统一神经网络,从多路摄像头到轨迹规划,尽量一个 stack 搞定,而不是 Lidar + 雷达 + 地图 + 规则引擎拼积木。争议很大,但好处是 硬件成本低、可规模化量产。
护城河 8:最大规模真实用户训练 FSD。
这是 6、7 的「出口」:算力训练出的模型,推给 最多真实付费用户 在路上验证——每个用户都是「带标注潜力的数据源」。Robotaxi 路线是「少车高密度」;特斯拉是「多车低密度但覆盖极广」。
观点:特斯拉赌的是「规模 × 统一架构」,不是「少数城市演示完美」。
依据:
Electrek 引用 Q1 2026 财报电话:马斯克把 消费级无人监督 FSD 最早推到 2026 年 Q4,并提到仍面临剩余技术与地理挑战。
FSD v14.x 栈已采用更统一的 AI compiler/runtime 架构(行业报道提及约 20% 反应速度 提升)——说明飞轮不仅在收数据,也在改 推理效率。
对你意味着什么:
AI 基础设施越来越像「自研芯片 + 自研 runtime + 自有数据入口」三位一体。只租 API、不碰算力、不碰数据管道,短期省事,长期可能没有迭代主权。

护城河 9–10:端到端模型 + 虚拟引擎
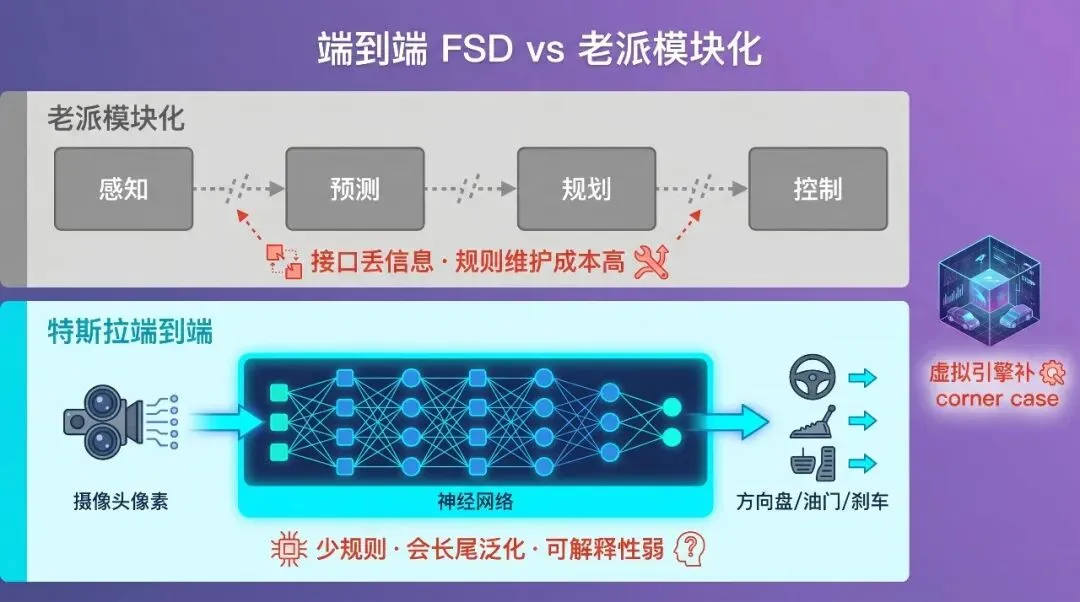
图 5:老派「感知→预测→规划→控制」vs 特斯拉端到端神经网络 + 虚拟引擎补 corner case
视频 17:35–21:00 讲最后两条,也是 路线之争 的核心。
护城河 9:跨时代端到端模型。
老派自动驾驶:感知 → 预测 → 规划 → 控制,模块分开训,接口处丢信息。特斯拉 FSD v12 之后大幅转向 端到端神经网络:摄像头像素进去,方向盘/油门/刹车意图出来,中间尽量让模型自己学。
这跟 AI 圈从「流水线 NLP」到「一个大 Transformer 搞定」是同一波浪潮。好处是 少人工规则、会长尾泛化;坏处是 可解释性差、出事难追责——监管和保险还没跟上。
护城河 10:无比真实的虚拟引擎。
真实路测再快,也覆盖不了所有危险场景(极端天气、罕见违章、高危 corner case)。仿真引擎可以在虚拟世界里 批量生成长尾场景,给模型「补课」。nymbusjp 的论点是:特斯拉的仿真保真度和数据闭环结合紧密,不是摆设级的 demo sim。
Waymo、Cruise 也做仿真;差异仍在于 sim + real data 是否同一套模型栈、同一套自动标注 pipeline 打通。
观点:端到端 + 仿真不是二选一,而是「真实飞轮补长尾,仿真放大长尾」。
依据:
视频 21:00 总结段标题即「特斯拉 FSD 断代领先」——这是博主/nymbusjp 的判断,行业仍有激烈分歧。
The Verge 提醒:FSD 涉及的部分自动化功能历史上关联 数百起事故、数十起死亡;特斯拉多通过和解处理 liability,L4 责任主体 仍是无人监督落地最大阻力之一。
对你意味着什么:
训练 Agent 时,真实用户 trace + 合成 adversarial case 同样要双修。只活在 benchmark 里,上线必翻车。

100 亿英里到了,「断代领先」该怎么理解
图 6:The Verge · [Tesla hits Musk's threshold for safe unsupervised driving](https://www.theverge.com/transportation/922900/tesla-10-billion-miles-unsupervised-fsd-robotaxi-elon-musk) · 2026-05
把 10 条护城河串起来,nymbusjp / 谢嘉琪视频的结论是:特斯拉在 AI 基础设施上已经「断代领先」——传统车企追数据追不上,Waymo 追规模追不上,纯视觉 + 端到端的路线赌对了。
冷静看,还有几道坎:
1. 100 亿英里 ≠ 明天就能松手。 Electrek 评论[6]说得很直白:这是 营销里程碑,不是一键解锁 L4。门槛从 60 亿改到 100 亿,无人监督时间表从 2025 推到 2026 Q4 最早——马斯克在 autonomy 上「修订 deadline」的历史很长。
2. 数据质量 > 数据数量。 100 亿英里里,高速和城区各占多少?城市街道约 37 亿英里,比例在涨,但 长尾 case 是否已被模型吃干,外界无法审计。
3. 监管与 liability。 马斯克在财报电话里说:无人监督要「when it is legal to do so」。技术、法律、保险三条线,任何一条卡住,都不会 OTA 一个「L4 开关」。
4. 中国与其他市场。 FSD 在中国、欧洲的落地节奏、地图与合规要求,和美国不能简单类比——全球化是另一条护城河,也是另一堆 friction。
观点:10 条护城河描述的是「为什么难追」,不是「已经赢了」。
依据:
视频 disclaimer 已说明个股分享非投资建议;上文 100 亿英里、Q4 2026 时间表均来自 2026 年 5 月公开报道与特斯拉安全页。
对 AI 从业者而言,更有价值的 takeaway 是 系统架构:统一硬件、边缘回流、压缩标注、自研算力、端到端、仿真闭环——这套组合拳不只属于汽车。
对你意味着什么:
- • 做产品的:别只盯模型榜单,把 数据回流 + eval + OTA 设计成第一天就有的能力。
- • 做投资的(若你关心):视频里的「全仓」是个人选择;技术护城河和股价波动是两回事,100 亿英里叙事 已部分反映在股价预期里。
- • 做内容的:原视频 在这里[1],22 分钟,10 章时间轴清晰,值得对照本文跳着看。
参考与延伸阅读
- • 原视频:15年自动驾驶工程师为何突然全仓特斯拉?[1] · 谢嘉琪 @jackiexie913
- • The Verge · 100 亿英里与无人监督门槛[4]
- • Electrek · 100 亿英里不是魔法开关[6]
本文基于公开报道与 YouTube 视频整理,技术细节随特斯拉 OTA 快速变化,欢迎指正。不构成任何投资或购车建议。
10 条 FSD 护城河里,你觉得 AI 圈最该抄哪一条?
A. 边缘 case 自动回流(护城河 3)
B. 自动标注降本(护城河 5)
C. 端到端 + 仿真双修(护城河 9–10)
评论区投 A / B / C。如果呼声高,我们下一篇写「把 FSD 飞轮搬进 Agent 产品」实操清单。
引用链接
[1] 谢嘉琪这期视频: https://youtu.be/urvugnPrjPs[2] 帖一: https://x.com/nymbusjp/status/1996897127708909617[3] 帖二: https://x.com/nymbusjp/status/2048295263907783104[4] The Verge 报道: https://www.theverge.com/transportation/922900/tesla-10-billion-miles-unsupervised-fsd-robotaxi-elon-musk[5] 官方 FSD 页面: https://www.tesla.com/fsd[6] Electrek 评论: https://electrek.co/2026/05/03/tesla-fsd-10-billion-miles-no-magical-milestone-autonomy/