你敢想象吗?把一辆纯视觉、没有激光雷达的汽车放在温哥华的码头,设定好导航,接下来的 4天21小时、6051公里 里,翻越落基山脉、穿过大草原、驶入复杂施工区、甚至深夜面对手持指示牌的筑路工人……人类驾驶员没有碰过一次方向盘,全程 0 次人工干预。
这不是科幻电影,而是刚刚在北美上演的真实一幕。
一、 刷爆全网:北美大陆的两场“封神挑战”
最近,北美自动驾驶圈和特斯拉车主群被几项堪称“终极地狱级里程碑”的实测彻底刷屏了:
1. 史无前例:6051公里不间断横穿加拿大特斯拉车主 David Moss 团队开着一辆搭载 HW4.0 硬件 的新款 Model 3,运行着最新推送的 FSD V14.3.3 版本,从不列颠哥伦比亚省的温哥华出发,一路由西向东,最终抵达新斯科舍省的哈利法克斯展厅。
整整 6051 公里,100% 的行驶轨迹、变道、超车、礼让全部由 FSD 独自完成。
更夸张的是,这套系统连充电动静都“包办”了。车辆自动导航驶入特斯拉超级充电站(Supercharger),自己转向、对位、倒车入库。驾驶员只需要下车插拔充电枪,随即上车继续让 FSD 带飞。
当事人 Devin Olsen 在社交媒体上直言:“我们经历了暴雨、路面碎屑、野生动物突袭、施工封路以及深夜的交通旗手(Flagger)。FSD 完美地碾压了这些障碍。这绝对是一场技术奇迹。”
2. 极限连击:解锁全美 48 州连续 0 介入几乎在同一时间段,David Moss 先是完成了洛杉矶到南卡罗来纳州 2700 英里的全美首次美西到美东的零接管穿越;随后,另一位特斯拉车主 Joe 更是用 FSD 将美国本土全部 48 个州连成了一条不间断的“0接管”闭环路线!
这两场测试之所以引发全行业震动,是因为它们彻底脱离了“高精地图的温室”和“固定的测试沙盒”,在地理环境、气候条件差异巨大的真实物理世界里,展现出了惊人的泛化能力。
二、 幕后功臣:从“规则驱动”到“端到端大模型(LDM)”的降维打击
为什么特斯拉 FSD 能够在短短 18 个月内,展现出如此脱胎换骨的“老司机”质感?
答案在于自动驾驶技术底层范式的根本性转变:从 Rule-based(基于规则的断层管道)彻底转向 E2E(End-to-End,端到端大模型)。
1. 传统架构的“长尾噩梦”
传统的自动驾驶(如上图 A 所示)是一个流水线系统:感知 预测 决策 控制。 每一层都由人类工程师编写数万行 C++ 代码去卡死规则。例如:“如果前方 5 米有障碍物,且速度大于 X,则触发刹车”。
- 致命缺陷:真实世界的路况是无限趋近于无穷的。深夜里一个穿着怪异衣服的筑路工人、一个被风吹变形的交通标识牌……人类工程师永远无法穷尽这些“长尾场景(Long-tail problems)”。一旦遇到没写进代码的死角,传统系统就会瞬间“抽风”或直接退出。
2. 端到端大模型(LDM)的物理觉醒
而特斯拉从 FSD V12 开始,到如今规模扩大了近 30 倍、融入模型混合架构(Mixture of Models)的 V14 版本(如上图 B 所示),彻底丢弃了这些条条框框。
- 输入:8 个摄像头的全高清视觉流(相当于 36Hz 的高频全景视觉,每 27.7 毫秒刷新一次世界状态)。
它不再去费力计算“这是一个什么物体、我该套用哪条法律”,而是像人类大脑一样,通过“世界基础模型(World Foundation Model)”内化了物理世界的运动规律。
💡 特斯拉 LDMs 训练的两步走战略:
- 第一阶段:模仿学习(Imitation Learning)。调用数百万辆量产车队回传的顶级人类驾驶员数据(Shadow Mode),让 AI 像人类老司机一样学会丝滑的切线、预测性减速和融入车流。
- 第二阶段:强化学习与边缘场景对抗(Reinforcement Learning)。在虚拟仿真环境中“投喂”海量的极端危险、低频高危场景(如突然窜出的行人、鬼探头),让 AI 进化出超越普通人类的防御性驾驶本能。
这正是为什么现在的 FSD 能够展现出超越人类反应速度的丝滑感,因为它的高频神经决策回路比人类足足快了数倍。
三、 客观审视:是“真神降临”还是“幸存者偏差”?
在一片赞歌声中,我们作为理性的观察者,也必须结合当前的技术现状与车主反馈,泼上一盆冷水。高能的硬核实测背后,依然有着无法忽视的性能边界。
1. Level 2 (Supervised) 依然是不可逾越的法律红线
无论是横穿加拿大还是 48 州,目前官方的定义全部叫做 FSD Supervised(监督版辅助驾驶),它在 SAE 标准下依然属于 L2++ 级别。
- 零干预 无人驾驶:零干预意味着驾驶员在 6000 公里里“选择不接管”,但驾驶员全程必须保持注意力高度集中。如果车主闭眼、看手机,车内摄像头会立刻发出刺耳警报并实施惩罚性禁用。
- 责任在人:一旦发生碰撞,法律责任100%属于人类车主,而非特斯拉。
2. “小脑极强,大脑尚嫩”的 System 1 与 System 2 割裂
诺贝尔奖得主丹尼尔·卡尼曼在《思考,快与慢》中将大脑分为:系统1(快速直觉思维)和系统2(慢速逻辑规划)。当前 FSD 的表现恰恰呈现出这种分化:
- 系统1(极强):微秒级的避让、暴雨中的居中保持、颠簸路段的跟车,视觉直觉拉满,表现得像个本能极强的天才。
- 系统2(尚需优化):面对长周期的路由选择和策略规划时,依然会犯低级错误。例如:
- 在车流极大的主干道上,由于错过了最佳的最佳变道时机,导致车辆在快到路口时不得不尴尬地连续强切。
- 在特定复杂的商场地下或立体停车场内,导航地图一旦出现偏差,FSD 依然会像一只无头苍蝇一样原地转圈。
- 对部分限速牌的上下文理解过于保守,常常在空旷的变相限速路段机械地开慢车,引来后车疯狂鸣笛。
3. 冰火两重天的行业争议
就在 moss 团队庆祝胜利的前几天,路透社发表了一篇针对特斯拉 AI 标注团队的深度调查,直指其安全宣传存在“数据注水”。有前员工爆料称,系统在实际训练中依然存在无法有效识别紧急特殊车辆、校车停靠等基础错误。同时,在国内,也有部分车主因对“完全自动驾驶”的早期宣发产生误解,从而引发了诉讼摩擦。
这种技术跃迁期的阵痛,恰恰说明了端到端大模型是一个上限极高、但下限依然需要死磕“长尾安全”的统计学模型。
四、 数据说话:自动驾驶到底比人类安全多少?
评价一套智驾系统,个例的跨州挑战固然吸睛,但真正能给全行业和监管层信心的,只有庞大的规模化大样本数据。
根据特斯拉最新披露的全球全量行驶里程碰撞报告,我们可以通过直观的图表看到端到端大模型带来的安全增益:
# 核心安全数据对比
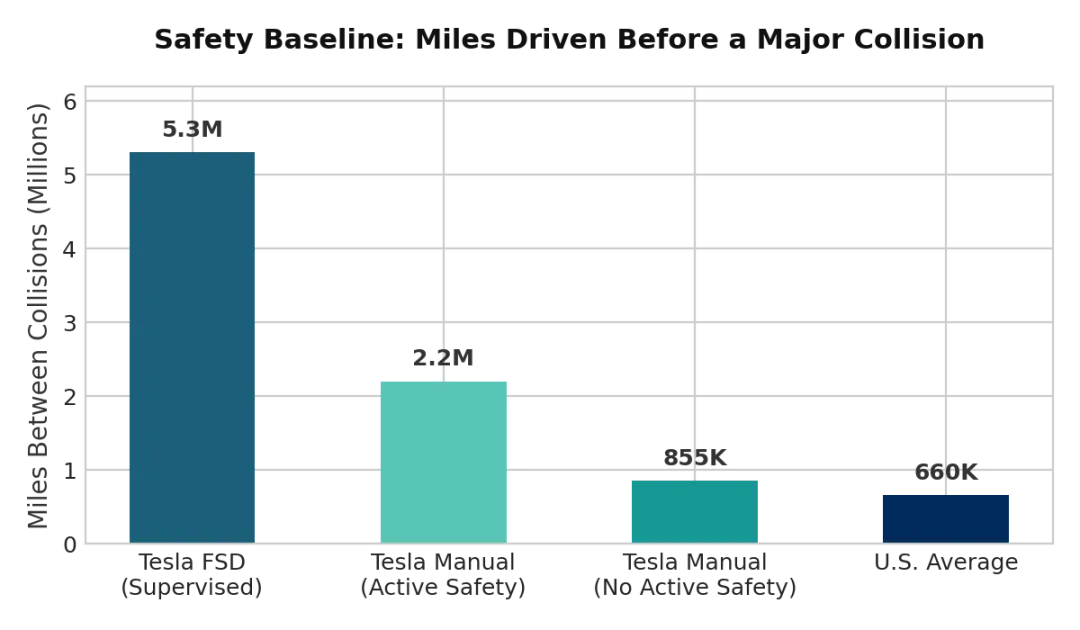
# [1] 大事故(Major Collision)每百万英里行驶里程:
# 特斯拉 FSD Engagement: 5.3M 英里/次
# 纯手动驾驶(开启主动安全): 2.2M 英里/次
# 美国全美平均水平: 0.66M 英里/次
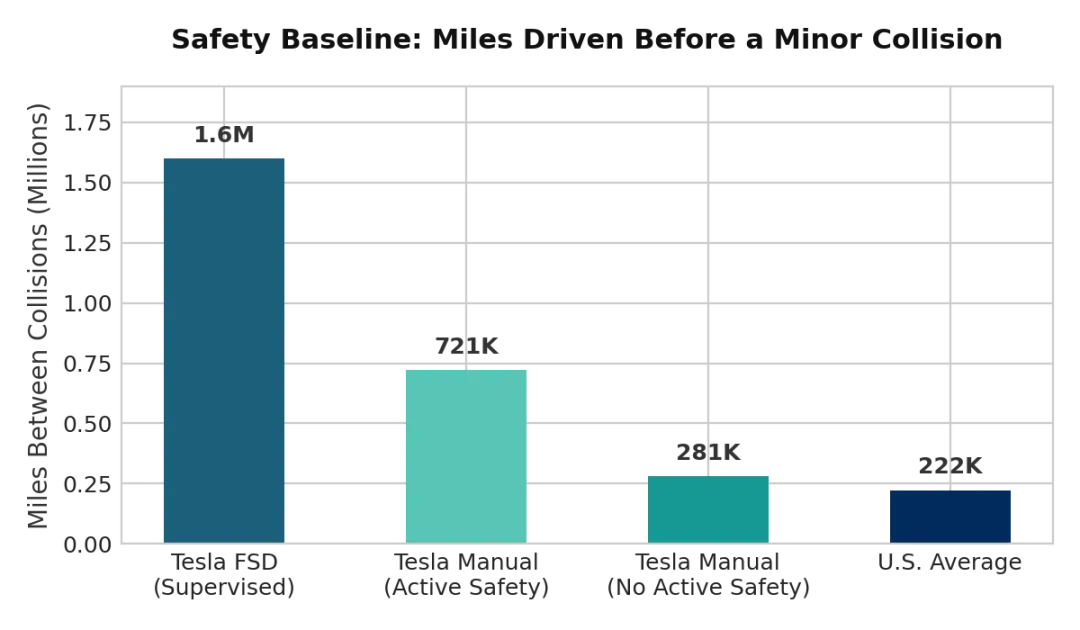
# [2] 小刮蹭(Minor Collision)每百万英里行驶里程:
# 特斯拉 FSD Engagement: 1.6M 英里/次
# 纯手动驾驶(开启主动安全): 0.72M 英里/次
# 美国全美平均水平: 0.22M 英里/次
从上方两组图表不难看出,如果对比全美平均水平(包含大量无智驾芯片的老旧车型、分心驾驶及醉驾等),搭载 FSD 的车辆在主干道及城市路段的安全率提升了将近 7 倍。
即使我们采用更严苛、更公平的对比方式——对比同样是特斯拉车型、同样拥有主动安全主动纠偏功能,但由人类纯手动控制的里程,FSD(Supervised)依然在大型事故上实现了 1.7 倍 的安全增益。
数据证明,AI 不会疲劳、没有情绪、拥有 360 度无死角视线,在防御性安全上,它确实正在展现出超越人类的统计学优势。
五、 2026 决战之年:群雄逐鹿与物理AI的未来
特斯拉在 Austin 的 Robotaxi camera-only 试点以及北美的全面爆发,就像推倒了第一张多米诺骨牌。2026年,整个汽车与机器人产业正在迎来一场惨烈的“端到端大模型大迁徙”:
- Rivian(里维安):推出了自家 Gen 3 自研芯片平台,通过“数据飞轮(ADR)”定向捕捉fleet中的有趣场景,利用大规模 LDM 进行纯 trajectory 预测,正面硬刚特斯拉。
- NVIDIA(英伟达)与梅赛德斯-奔驰:NVIDIA 全面发布了 Cosmos 物理世界大模型,并推出了拥有 100亿(10B)参数的开源智能体 Alpamayo-R1,通过“双栈 guardrail(端到端大模型+确定性规则防撞墙)”的冗余设计,正在大面积赋能传统老牌主机厂。
- 跨界降维:人形机器人的曙光:更可怕的是,这种在车端被验证过的“高频视神经驱动肌肉/电机”的 E2E 算法,正在被无缝复制到人形机器人身上。特斯拉的 Optimus 机器人在 Fremont 工厂内进行质量检测,以及英伟达的 Project GR00T 项目,其底层核心全都是这套物理大模型。
结语
自动驾驶的“圣杯”,从来不是靠几句激进的口号就能摘下的。
北美 6051 公里的 0 介入横穿,是一次极其漂亮的技术肌肉作秀,它让我们看到了“无监督无人驾驶”无限逼近现实的曙光。但要真正让监管机构放开方向盘、让每一位普通消费者交出生命信任权,行业还需要在本土地理法规的深度适配、人机交互的信任界面设计,以及严苛的责任划分上走过更长的一段长征路。
智驾下半场,大模型已经开局,属于我们的出行未来,正以超乎想象的速度呼啸而来。
互动话题:行经 6000 公里全程不扶方向盘,换作是你,你敢把生命安全完全托付给当前的端到端 AI 吗?欢迎在评论区聊聊你的看法!
本文内容及数据参考自:BASENOR Team Report, Not A Tesla App, @wholemars/X Live, Reuters Investigation, IEEE Survey: "The Era of End-to-End Autonomy" (2026).