智控时代社
AI驱动自动驾驶新篇章
自动驾驶AI模型的全景解析(上)
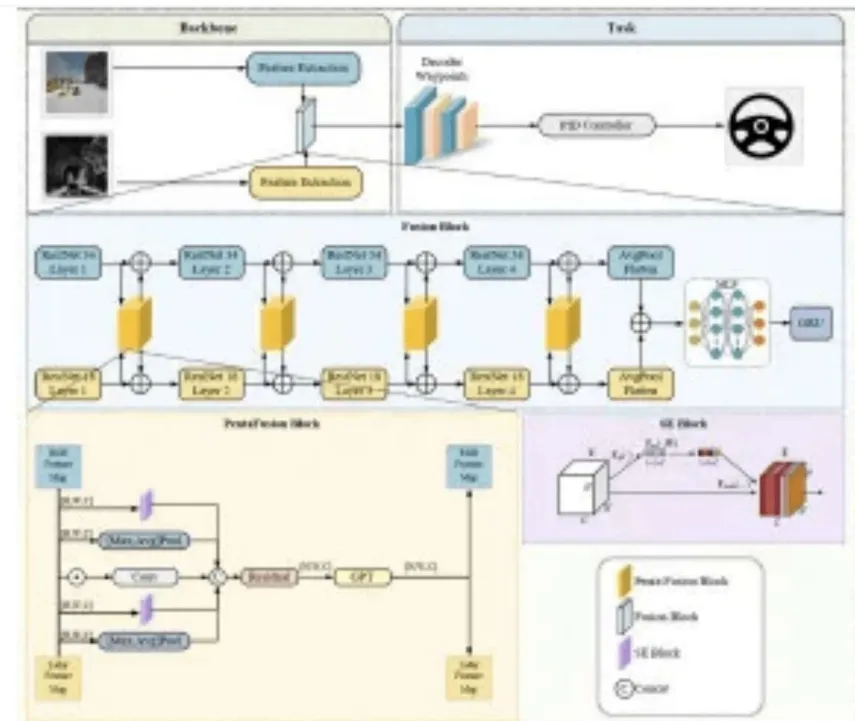
端到端规划+控制执行:传感器→输出未来轨迹;
再由传统控制器(PID/MPC等)跟踪执行(工程上常见、也易做安全约束)。
Unified Autonomous Driving
规划导向的端到端自动驾驶
(UniAD)
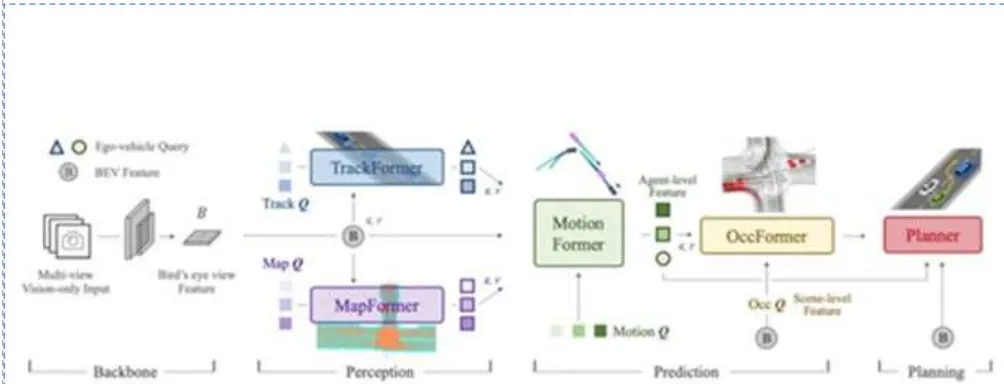
UniAD是一个"以规划为核心(planning-oriented)"的统一自动劝驾驶模型框架,把感知(跟踪/建图)、预测(运动/占用)和规划(自车未来轨迹)在一个端到端可联合优化的体系里串起来,最终输出自车未来vvaypoints(规划轨迹),并同时产出可解释的中间结果(目标轨迹、地图要素、未来占用等)供安全与调试使用。
1.1 UniAD: 规划导向的系统设计哲学
UniAD 端到端自动驾驶全栈架构
◆核心思想:
将“最终目标=规划”作为系统设计的中心,
打破传统感知-预测-规划的串行隔离。
◆解决痛点:
传统系统容易产生信息隔离与误差累积,
多任务学习常出现负迁移。
◆关键机制:
提出按规划需要重新排序任务,让检测、
跟踪、地图、预测等任务协同服务于规划。
◆统一接口:
使用基于Query的统一接口串联各模块,
实现全链路信息高效流转。
1.2 UniAD: 层次化Transformer结构
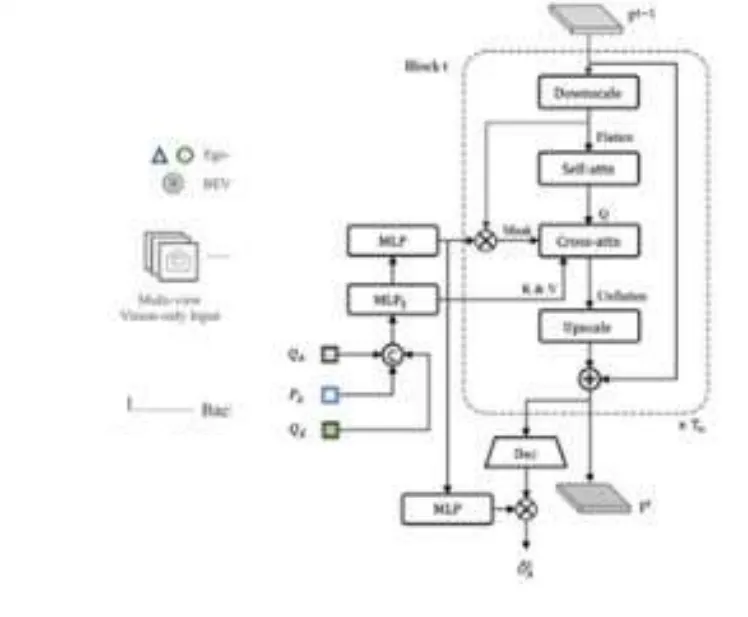
UniAD 核心组件OccFormer 结构细节
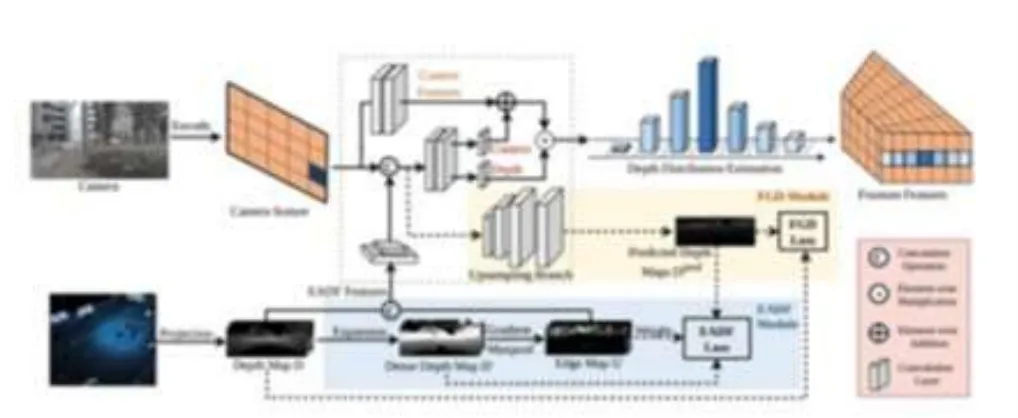
◆BEV特征提取:
输入多帧多相机序列,通过BEV编码器(如BEVFormer)将环视图像特征转换为统一的BEV空
间表征。
◆任务模块化设计:
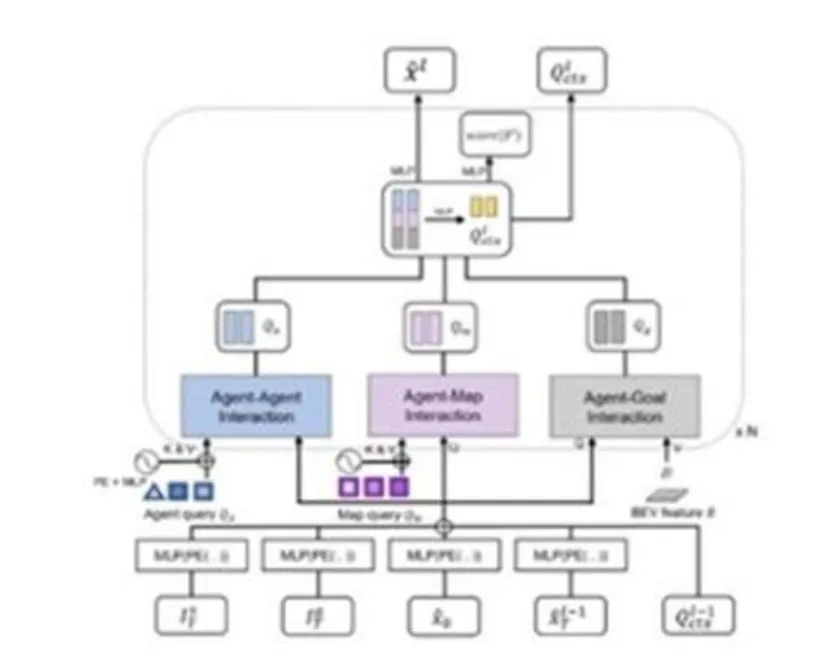
包含TrackFormer(跟踪)、MapFormer(地图)、MotionFormer(预测)与OccFormer(占用空间预测)。
◆Planner 规划模块:
利用Ego Query预测未来路径点,并参考
Occupancy信号进行实时避碰与路径优化。
◆信息流转机制:
Query作为中间表征,在不同模块间传递场景实体、
时空上下文与复杂的交互关系。
1.3 UniAD: 协同优化与规划约束
◆Query表征优势:
相比传统的Bounding Box,Query表征更加灵活,能够编码复杂的交互关系与场景语义信息。
◆深度注意力机制:
通过Cross-Attention机制,实现Agent、Map、Ego与BEV特征之间的深度信息交换与对齐。
◆可微信号注入:
将规划目标与避碰信号作为学习目标,实现全链路的可微优化,提升系统整体安全性。
◆工程性能平衡:
在提升协同性的同时,通过Query设计有效控制计算量,建立可验证的端到端评估体系。
1.4 UniAD: 全栈研究基线与原型验证
UniAD 全栈感知与规划流水线概览
◆系统定位
作为自动驾驶全栈研究的强力基线,提供“感知+预测+占用+规划”的闭环链路。
◆基准评估
在nuScenes等公开数据集上构建评估体系,统一对齐各项任务指标。
◆控制对接
输出的Waypoints可直接对接轨迹跟踪控制器,Occupancy用于安全约束。
◆开源贡献
官方提供完整的Pipeline与模块组织方式,极大降低了全栈系统的开发门槛。
1.5 UniAD: 模块化拆解与灵活落地
UniAD 模块化组件拆解与任务流转示意
◆拆解用法
系统支持高度模块化,可根据工程需求仅提取OccFormer强化安全避障,或单独使用MotionFormer进行多模态轨迹预测。
◆感知前端
可仅保留TrackFormer与MapFormer作为Token化的感知输出,无缝对接下游的传统规则规划器或混合规划系统。
◆编码器兼容性
BEV编码器底座可灵活替换,支持从轻量化单帧版本到高性能长时序、多模态融合版本的平滑升级。
◆训练策略
建议采用分阶段训练:先稳定感知模块特征,再逐步引入预测与规划任务,确保全链路联合训练的收敛稳定性。
1.6 UniAD: 量产关注点与工程实践
算力挑战与优化:
■显存压力优化:
多Decoder叠加导致显存占用极高,需采用
Token约简技术。
■推理加速:
利用FP16/INT8量化及算子融合,降低端到
可解释性分析:
通过可视化Query与AttentionMap,分析影响规划的关键场景要素。
■因果溯源:
利用Token化表征,定位规划错误的具体来源(如预测偏差或地图错误)。
验证体系构建:
■双层监控
建立“任务级指标+规划闭环指标”双层监
控,确保系统整体安全。
■鲁棒性测试
针对子任务退化(如感知丢失)对最终规划的影响进行压力测试。
量产取舍策略:
■落地路径
L2量产更偏向可验证的模块化链路,UniAD
目前多用于研究原型。
■算法启发
利用UniAD的端到端思想,启发子模块(如Occ)的算法优化与迭代。
智控时代社:专注自动驾驶|机器人|信息安全|出海合规。聚焦产业前沿动态,链接厂商、研发、法务与出海从业者,欢迎各行各业专家加入这个大家庭,共建技术交流、资源对接、经验互通的垂直行业社群。自动驾驶方面经验可以联系白会长,安全方面可以联系我。
扫码进群
技术文献 | 五十铃自動車自动驾驶专家
白东升
主编排版 | 软安科技联合安全解决方案
余自杰
备注声明 | 原版声明,如有侵权内容请后台联系!