新能源卖疯了,自动驾驶却“死”了.
「自动驾驶,没有奇迹」
今天,新能源依然烈火烹油。
电池、超充、出海、地缘博弈,每一个关键词都在制造新的千亿市值。
但如果我们把时钟拨回两年前,彼时发布会上的主角不是续航和算力,而是“年底开通城市NOA”,"全自动驾驶"、"解放双手" 这样的豪言壮语。
如今呢?
车企的宣传口径从“自动驾驶”悄然退回到“高阶辅助驾驶”,从“开城”退回到“体验提升”,曾经估值千亿的 L4 独角兽们,要么降维去做 L2+,要么已经倒闭清算。
就连被认为最激进的特斯拉,也把 Robotaxi 的发布时间从 2024 年推迟到了 2027 年。
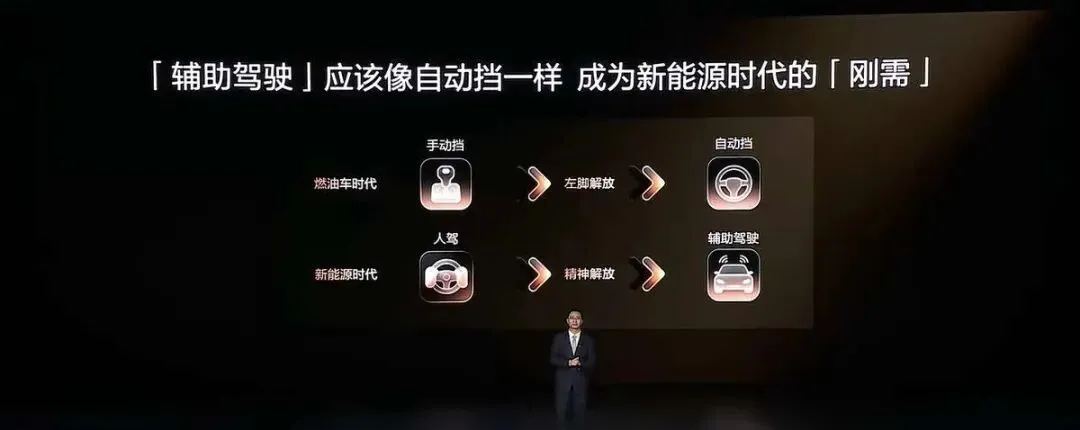
图源|5月比亚迪智能化战略发布会
为什么会这样?
是自动驾驶技术遇到了不可逾越的瓶颈吗?是市场不需要自动驾驶了吗?
都不是。
一来是工信部开始规范国标了。
二来更底层的答案是:我们终于不得不承认,过去十年我们追逐的那个 "随时随地、任何人都能使用的全自动驾驶",在可预见的未来,根本不可能实现。
我们现在所有量产车上搭载的,从特斯拉 FSD 到小鹏 XNGP,从华为 ADS 到理想 AD Max,本质上都是 L2 级辅助驾驶,没有一个是真正的自动驾驶。
哪怕是已经拿到 L3 牌照的长安深蓝和北汽极狐,也只能在指定的高速和城市快速路上使用,而且驾驶员必须随时准备接管。
就连被视为 L4 标杆的百度萝卜快跑,2026年了依然只能在每个城市划定的"电子围栏"内运行。

自动驾驶技术,不行了?
恰恰相反,BEV、OCC、端到端,每一代新范式都在吞噬旧基准。
真正变的是预期:
资本市场不再为“年内五十城”的PPT买单,用户不再相信短视频里的脱手 demo。
监管则用沉默表达态度:萝卜快跑在武汉跑了两年,依然没有一座城市真正打开无安全员的绿灯。
(有没有感觉这个来时路,和当前的另外一个大火的领域有点像?)
抛开伦理相关的问题,自动驾驶最大的问题,其实本质仍然是 "不够安全"。
2026年开年至今不到半年,国内外智驾事故已连发多起。
国外:
国内:
据相关统计,2026年上半年公开报道的新能源车安全事故超120起,其中智驾相关事故37起,同比上升35%。

图源网络|2025年10月,江西某高速发生较大道路交通事故,据悉驾驶员开启车辆智能辅助驾驶后双手完全脱离方向盘。
当前实际规则就是:智能驾驶,不解决安全,就永远拿不到路权。(哪怕是辅助驾驶,也一样)
这就是为什么我们今天要回到技术层面重新讨论,三道安全防线。
不是因为它们有多新,而是因为再不修,整个行业在技术层面可能也就到这里了。
事故频发的背后,往往指向自动驾驶感知系统存在的三大挑战:
看得见但看不懂:系统能检测到物体,却难以预判其潜在危险(如行人突然横穿)。
看不见:物理遮挡导致目标完全被遮蔽(如大型车辆后突然跑出的儿童)。
感知不确定:在恶劣天气、GPS弱信号等场景下,系统对自身定位和识别结果缺乏置信度,无法做出稳妥决策。
针对这三大挑战,接下来我们将以自动驾驶系统的“三道安全防线”为框架,梳理自动驾驶系统如何分别应对上述三个挑战,共同构建出完整的安全保障。
这是我们投入最多、吹嘘最狠的一道防线。它的核心目标本该是:在正常工况下,系统尽可能不犯错。
但现在,它已经彻底异化成了一场 "刷指标大赛"。
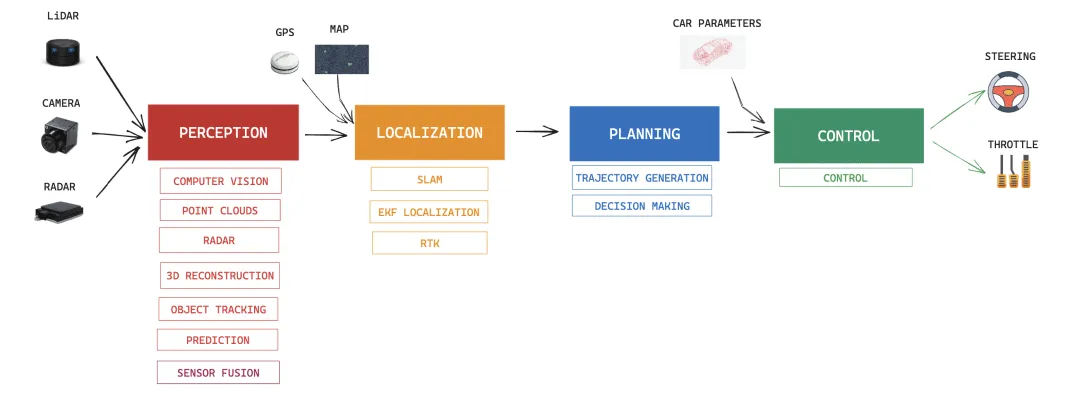
图1 | 自动驾驶系统的核心模块:感知(Perception)、定位(Localization)、规划(Planning)与控制(Control)构成完整的决策链路
我们先来回顾一下,整体演进脉络。
传统的感知系统以"目标检测"为核心:识别出前方有一辆车,计算距离,然后刹车。
这种被动响应机制在结构化道路上表现尚可,但在城市复杂交通流中,它的局限性很快就会暴露出来。
系统知道"前方有车",却不知道"这辆车有多危险"。
再之后,自动驾驶系统开始向主动风险评估演进。
风险评估的核心在于将当前场景状态与车辆自身的响应能力(感知精度、决策延迟、制动距离等)联合建模,从而输出一个动态的风险等级,而非简单的距离数值。(源自综述:Risk assessment in autonomous driving: a comprehensive survey of risk sources, methodologies, and system architectures)
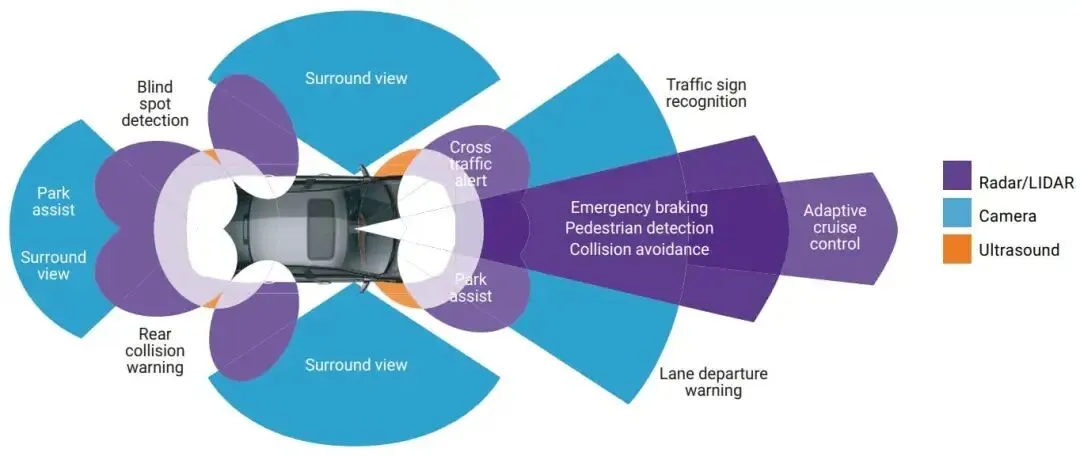
图2 | 多传感器覆盖范围示意图:摄像头(蓝色)负责远距离识别,毫米波雷达(紫色)提供全向探测,超声波(橙色)覆盖近距离盲区
在工程实现层面,鸟瞰图感知和多传感器融合是这一能力的基础。
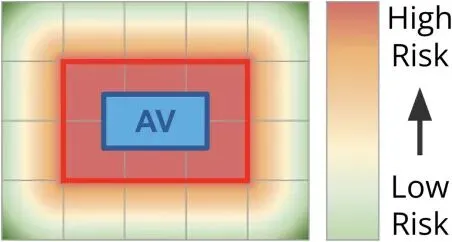
系统将摄像头、激光雷达和毫米波雷达的数据融合为统一的俯视坐标系,在车辆周围生成一张实时的"时空概率占用热力图":车辆前方的高风险区域被标注为红色,低风险区域为绿色。
这样的方式,使得系统能够在危险发生之前,提前调整速度和行驶轨迹。
图3 | 车辆周围风险热力图:红色区域代表高风险,绿色区域代表低风险,系统据此动态调整行驶策略
然而,主动风险评估面临的最大挑战是长尾问题:
系统在大量常见场景中训练得很好,但对于训练集中极少出现的罕见场景(如道路上的碎石堆、倒下的树枝、奇形怪状的施工围挡),感知能力会急剧下降。
过去两年,从热力图的落地到可解释框架的探索,主动风险评估正从概念真正“扎进”工程实现。
例如,清华大学团队在《Communications in Transportation Research》上提出的可解释轨迹规划框架,将风险场进一步演化为离散化的“风险图”,并通过与候选轨迹树的深度融合来筛选低累积风险的行驶路径。
在具体场景的风险评估方面,2026年IEEE RA-L发表的《Learning a Unified Risk Map for Autonomous Driving in Partially Observable Environments》则提出了一种统一的“风险图”建模与学习框架,专门针对部分可观测环境下的遮挡风险进行了精细化建模。通过融合交通流风险和碰撞风险,结合扩散式场景生成增强长尾数据。
此外,2026年IEEE RA-L收录的另一项工作《Context-aware Risk Index》,提出了一种轻量级模块化框架,基于物体的运动学与空间关系量化定向风险,并在真实交通数据中验证了其在复杂高动态环境下的安全性与鲁棒性。
这一系列进展表明:主动风险评估已经不是对风险的“笼统判断”,而是从学术共识走向工程落地的关键一步。
这是我们最不重视,也是最容易出大事的一道防线。它的核心目标本该是:当系统不可避免地犯错时,不要造成致命后果。
但现在,行业里 90% 以上的所谓 "冗余",都是自欺欺人的伪冗余。
可能最大的谎言就是:多装几个传感器就是冗余。
即使传感器性能再强,也无法违背物理规律看穿实体障碍物。
在城市道路中,被大型货车遮挡的对向来车、从路边停放车辆后突然窜出的行人,这些动态遮挡构成了自动驾驶最难处理的安全盲区。
针对这一问题,学术界提出了两类截然不同的解决思路。
第一类:主动推断遮挡区域。
普林斯顿大学安全机器人实验室提出了一种基于博弈论的遮挡感知策略。其核心思路是维护一个"前向隐藏集":系统根据历史观测数据,持续追踪所有可能存在于遮挡区域内的目标状态集合。
在规划行驶轨迹时,只要候选轨迹的前向隐藏集与"危险区"(即即便发现目标也无法及时避让的状态空间)不重叠,该轨迹就被认为是安全的。更进一步,系统甚至可以主动向侧方轻微偏移来"探视"遮挡区域,从而缩小隐藏集的范围,降低不确定性。

图4 | 遮挡感知仿真场景:自车(白色)跟随前方卡车(橙色)行驶,系统需要推断卡车遮挡区域内的潜在危险
第二类:用体素网格描述整个空间。
为了从根本上解决遮挡和长尾问题,学界正在大规模转向 3D 占用预测。
与传统的目标检测不同,3D 占用预测将车辆周围的三维空间划分为密集的体素网格,直接预测每个网格是否被占用以及它属于哪种语义类别(道路、行人、植被等)。
这种方法的关键优势在于:它不需要识别出"这是一辆卡车",只需要告诉规划系统"前方这个体素格子被占用了,不能开过去"。这使得系统对于任意形状的未知障碍物都具有天然的鲁棒性。
代表性工作 SurroundOcc 展示了如何仅凭多路摄像头的 RGB 图像,生成完整的语义化 3D 占用网格。在 CVPR 2023 的 3D 占用预测竞赛中,NVIDIA 团队的 FB-OCC 方案以 54.19% 的 mIoU 指标摘得桂冠。
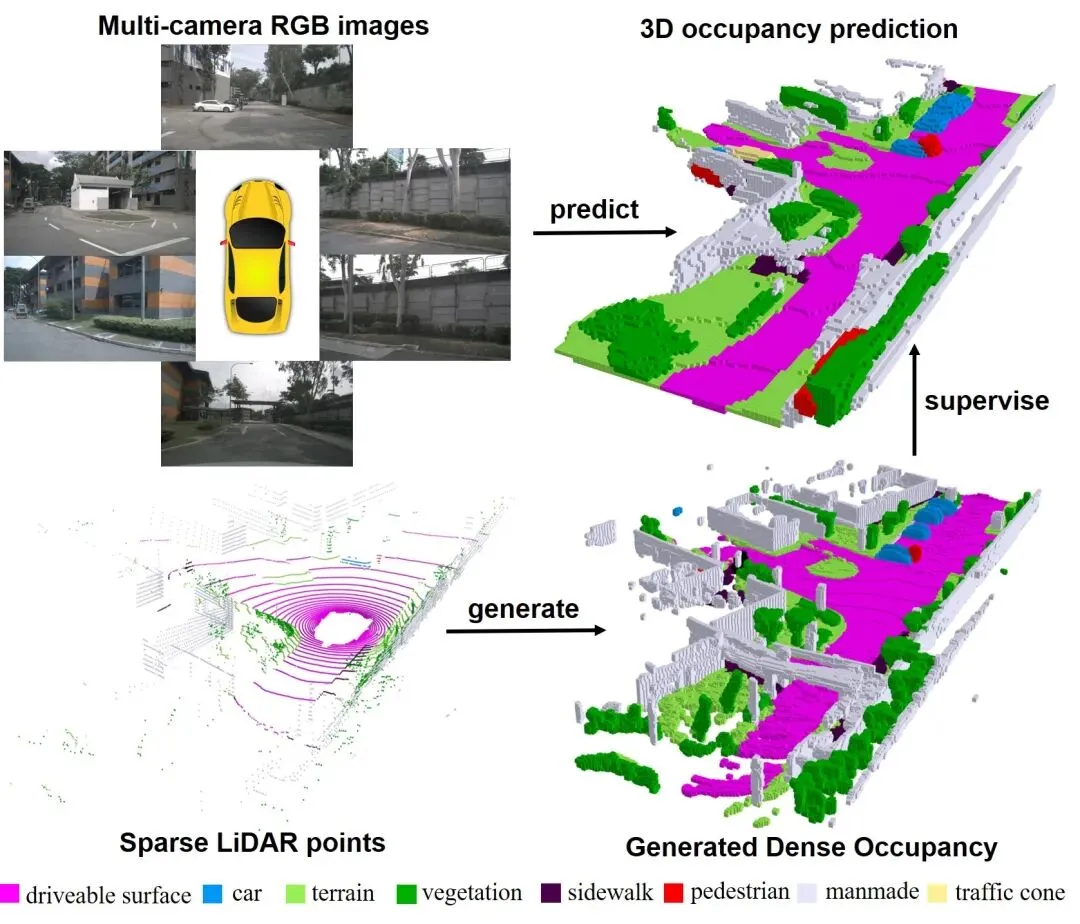
图5 | 3D 占用预测:系统从多摄像头图像(左上)和稀疏激光雷达点云(左下)出发,生成密集的语义化三维体素网格,不同颜色代表不同语义类别
在此基础上,ECCV 2024 发表的 OccWorld 更进一步,在 3D 占用空间中构建了一个世界模型。系统不仅能描述当前时刻的空间占用状态,还能预测未来数秒内整个场景的演变:包括自车的运动轨迹和周围障碍物的动态变化。
这为规划模块提供了更长时间跨度的安全裕量。
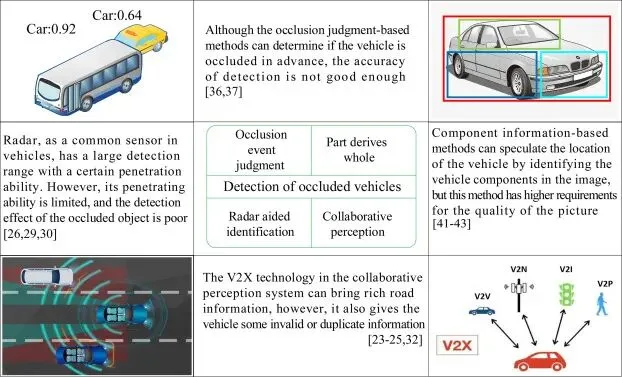
图6 | 遮挡目标检测的四类主要方法:遮挡事件判断、雷达辅助识别、V2X 协同感知和基于组件的推断
如果说感知回答了"周围有什么",那么定位则回答了"我在哪里"。
两者缺一不可:即便系统准确识别出前方有一个行人,如果不知道自己在地图上的精确位置,也无法做出正确的避让决策。
传统的高精地图方案通过将实时激光雷达点云与预先采集的地图地标进行匹配,实现厘米级定位精度。
如图7(下图)所示,系统将激光雷达扫描到的路灯杆、车道线等特征(橙色点)与地图中存储的地标(蓝色点)进行配准,从而精确推算出自车位置。
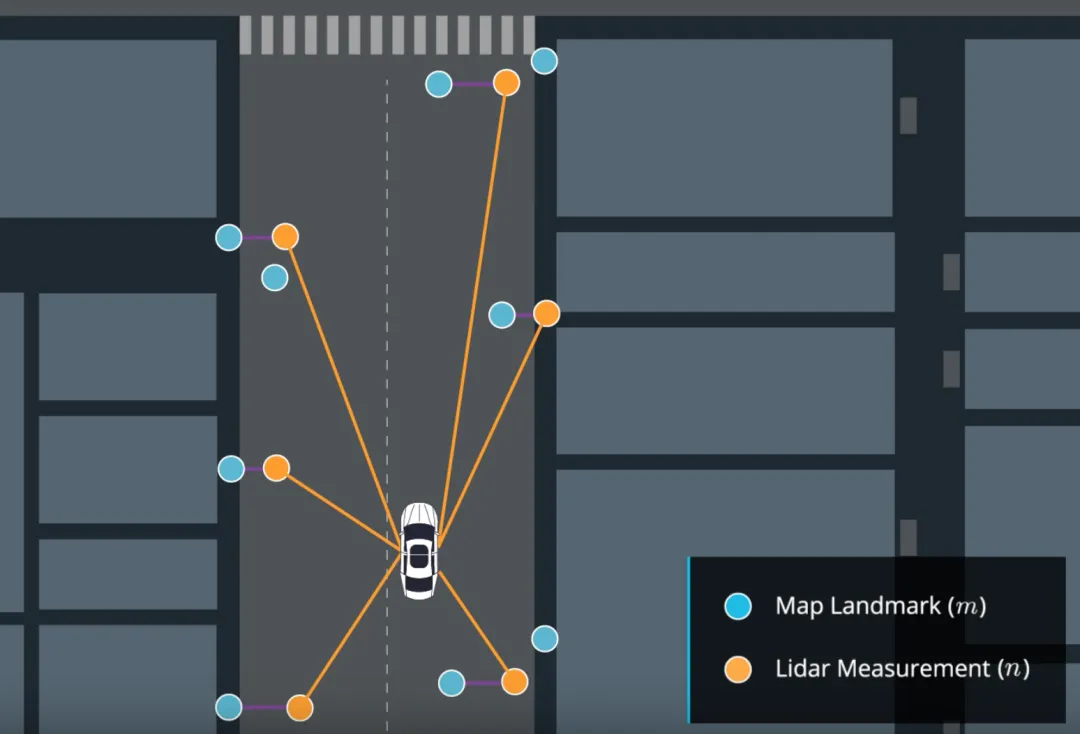
图7 | 激光雷达测量(橙色)与地图地标(蓝色)的匹配定位:两者之间的偏差用于修正 GPS 误差,实现厘米级定位
然而,高精地图存在两个根本性的局限。
为此,行业正在经历一场从"重地图"向"轻地图"乃至"无图方案"的演进。
在"无图方案"中,系统通过在线地图构建技术,利用车端传感器实时感知车道线、道路边界和交叉口拓扑结构,生成局部的轻量化语义地图,替代预先存储的高精地图。国内的小鹏、华为、百度等均已在城市 NOA场景中大规模部署了类似方案。
定位可靠性的另一个关键维度是不确定性估计。
系统不仅需要给出一个定位结果,还需要知道这个结果有多可信。在 GPS 信号受阻的隧道内、在大雨导致摄像头模糊的恶劣天气下,定位置信度会显著下降。
当系统检测到定位不确定性超过阈值时,应主动降速、扩大安全距离,甚至请求人工接管,而不是继续以正常速度行驶。这种不确定性感知的定位策略,是安全感知体系中最后一道也是最重要的一道防线。
自动驾驶的安全感知,从来不是单一传感器的单打独斗,而是一套需要协同运作的防御体系。
第一道防线通过主动风险评估,回答了"哪里危险",将系统从被动响应转变为主动预判;
第二道防线通过 3D 占用预测和遮挡推断,回答了"遮挡后面有什么",守住了长尾场景和视觉盲区的安全底线;
第三道防线通过在线建图与不确定性估计,回答了"定位有多可靠",确保了系统在极端环境下的鲁棒性。
这三道防线环环相扣。如果定位出现偏差,风险评估的结果就会失准;如果遮挡感知缺失,再精确的风险热力图也会留有盲区;如果风险评估不够及时,即便感知准确也可能来不及响应。
当然,这套体系目前仍有明显的局限。
长尾场景的覆盖永远无法穷尽,在线建图的稳定性在极端天气下仍需验证,不确定性估计的阈值设定也需要大量真实数据的标定。
自动驾驶的安全感知,仍是一个需要持续迭代的开放问题。
退烧之后,欠的债该还了
新能源的盛宴还在继续,但自动驾驶技术为王的估值态势引擎已经熄火。
这未必是坏事。
退烧意味着表演阶段的结束。没有了“年内开城”的倒逼,终于可以回头修补那些被跳过的硬骨头。
[1] Waymo. (2025). Waymo Safety Impact Hub. https://waymo.com/safety/impact/[2] Lu, D., Du, H., Wu, Z., & Yang, S. (2025 ). Risk assessment in autonomous driving: a comprehensive survey of risk sources, methodologies, and system architectures. Autonomous Intelligent Systems, Springer. https://link.springer.com/article/10.1007/s43684-025-00112-1[3] Safe Robotics Laboratory, Princeton University. Safe Occlusion-aware Autonomous Driving via Game-Theoretic Active Perception. RSS 2021. https://saferobotics.princeton.edu/research/occlusion-hybrid-game[4] Wei, Y., et al. SurroundOcc: Multi-Camera 3D Occupancy Prediction for Autonomous Driving. ICCV 2023.[5] Zheng, W., et al. (2024 ). OccWorld: Learning a 3D Occupancy World Model for Autonomous Driving. Computer Vision – ECCV 2024, pp. 55–72. https://link.springer.com/chapter/10.1007/978-3-031-72624-8_4[6] Chen, P., et al. (2025 ). Maps for Autonomous Driving: Full-process Survey and Frontiers. arXiv:2509.12632.▲滑动查看完整参考文献