特斯拉纯视觉自动驾驶
3个真相和1个短板
特斯拉不用激光雷达这件事,很多人一听就火大:别人都在给车装“尺子”,它偏要让车靠“眼睛”猜距离,这到底是技术自信,还是把风险甩给用户?说实话,我不认为纯视觉路线可以被神化,但也不能简单骂成省成本的任性。它真正的争议点在于:摄像头看到的只是画面,不像激光雷达能直接量距离,那车到底怎么判断前车有多远、哪里有行人、红绿灯是什么状态、这条路能不能走?
 两辆特斯拉汽车在山路驾驶
两辆特斯拉汽车在山路驾驶
01.
争议点,不装激光雷达到底省了什么
各位老板,特斯拉的视觉方案到底是什么原理?为什么很多车企做智驾,都喜欢用激光雷达加摄像头,先把前方距离和障碍物测清楚。但特斯拉却偏偏反着来,坚持只靠摄像头和神经网络?
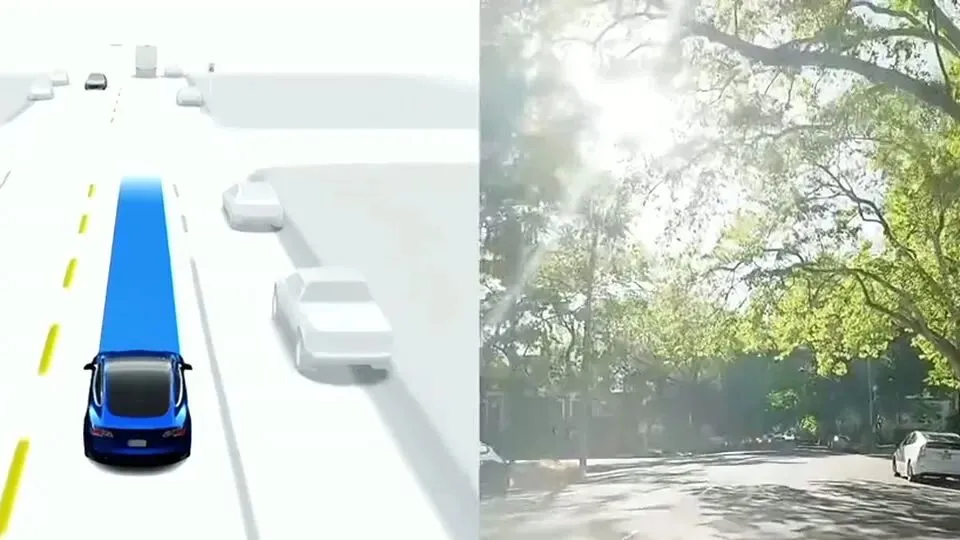
在我看来,这个问题不能只看“装没装硬件”。激光雷达像一把尺子,主动发射激光,再根据反射时间算出物体距离;摄像头只是接收光线,它看到的是画面,不会天然告诉车:前车到底离你是近还是远。放到真实路上,就是你在高架跟车,前面一辆车突然轻点刹车,激光雷达路线更像先把距离量出来再说;纯视觉路线则要靠画面里的物体大小、透视关系、多摄像头角度和连续视频变化去推断。
 激光雷达和摄像头协同工作的动画演示
激光雷达和摄像头协同工作的动画演示
这也是我对纯视觉路线一直保留意见的地方:它不是少装一个零件那么简单,而是把更多压力压到了算法理解能力上。如果你天天走的是光线复杂、雨雾多、路口乱的城市道路,那它面对的考题就不是“看见没看见”,而是“看懂没看懂”。
02.
摄像头不是大脑,神经网络才是关键
马斯克曾经表达过一个很有代表性的观点:人类开车靠的是眼睛和生物神经网络,那机器想实现通用驾驶,对应的就是摄像头和基于神经网络。这个说法很有煽动性,但拆开看,其实也很朴素。
所谓视觉方案,我们可以理解为,让车依靠摄像头来观察世界,再通过神经网络理解道路环境,最后参与车辆的驾驶判断。它的逻辑很像人开车,眼睛负责观察路况,比如前方有没有车,路边有没有行人,红绿灯是什么状态,车道线在哪里。但真正决定怎么开车的,并不是眼睛本身,而是大脑。
 特斯拉FSD系统显示真实摄像头画面与渲染道路环境
特斯拉FSD系统显示真实摄像头画面与渲染道路环境
放到车上也是一样,摄像头负责采集画面,神经网络负责理解画面,最后再由车辆控制系统去执行方向、刹车和加速。但这里有一个关键点,摄像头本身并不懂道路,它只会拍画面。比如摄像头看到前方一张图,里面有车、有行人、有车道线、有红绿灯,但对车辆来说,起步阶段只是一堆二维图像数据。
真正难的是系统要从这些图像里判断:哪里是路?哪里是车?哪里是人?红灯还是绿灯?前车离我多远?旁边车会不会变道?这块区域能不能走?纯视觉路线的核心,不是车上有几个摄像头,而是能不能把二维画面转换成车辆能理解的三维道路世界。
 真实路况与系统抽象识别的左右分屏
真实路况与系统抽象识别的左右分屏
03.
BEV和Occupancy,车要先知道哪里不能去
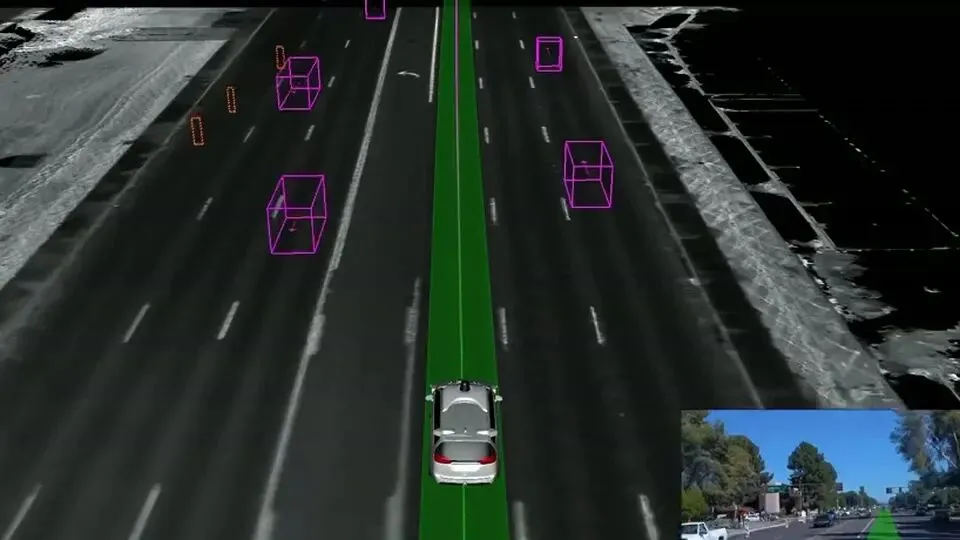
特斯拉真正想做的,是把车身前后左右多个摄像头的信息融合起来,形成一个类似俯视视角的空间理解,这就是现在经常说的BEV鸟瞰视角。你可以把它理解成,摄像头看到的是一张张照片,AI要把这些照片拼成一张动态地图。
 多视角摄像头图像被重建为三维道路模型
多视角摄像头图像被重建为三维道路模型
这事儿落到日常用车里,就很直观了。你打算从辅路汇入主路,车要知道左边有没有车,右后方有没有电动车,前方哪里有路口,哪里是路沿,哪里能走,哪里不能走。不是屏幕上画几条线就完事,而是要把路口、人、车、边界和可通行区域组织成一个车能“理解”的空间。
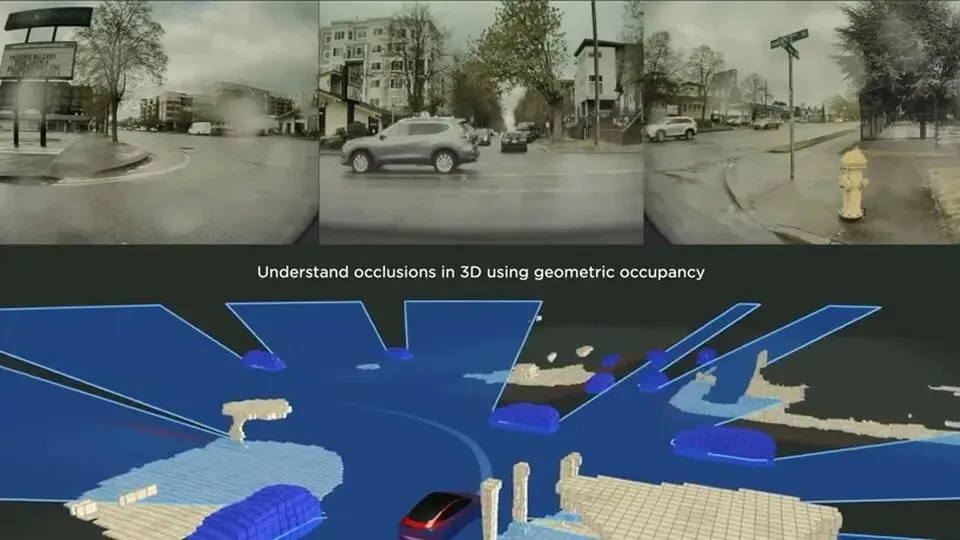
但做到这一步还不够。现实道路上很多东西并不标准,比如路上掉了一个轮胎、一块施工板,或者一段伸出来的树枝。如果系统必须识别“这个东西到底叫什么”,再决定要不要避让,那就容易出问题。所以特斯拉还有一个很重要的概念,叫Occupancy。它的逻辑很简单,我不一定非要知道这个东西是什么,但我要先知道这个空间有没有被占住,我能不能开过去。
 Occupancy网格显示车辆周围空间占用情况
Occupancy网格显示车辆周围空间占用情况
以前更像是在问“前面这个东西是什么”,现在更关键的问题变成“前面这个地方能不能走”。这一步如果做得好,车面对异形障碍物时会更像一个谨慎司机:我叫不出它的名字,但我知道那块地方不能压过去。
你更在意哪种路线?是激光雷达给你的“距离安全感”,还是纯视觉靠AI理解空间的长期潜力?我个人会更看重恶劣天气和复杂路口下的稳定表现,因为那才是普通用户每天会遇到的麻烦。
04.
端到端,特斯拉真正激进的不是不用雷达
再往后,就是特斯拉这几年很关键的变化:端到端神经网络。过去很多辅助驾驶系统都是模块化路线,先感知,识别前面有什么,判断别人会怎么动,再规划,决定自己怎么走,最后控制方向盘、刹车和电门。
但从FSD
V12开始,特斯拉的城市道路辅助驾驶开始转向端到端模型。它不再只是让神经网络负责“看见世界”,而是让神经网络进一步学习“怎么开车”。以前可以说更像是工程师教车:看到红灯要停,前车慢了要减速,距离够了才能变道。端到端模型的思路,则是让AI看大量真实驾驶视频,学习人类司机在复杂路况下怎么判断、怎么变道、怎么通过路口。
 模块化路线向端到端神经网络模型转变示意图
模块化路线向端到端神经网络模型转变示意图
所以特斯拉视觉方案真正激进的地方,不只是不用激光雷达,而是它想让车从规则驾驶转向数据驱动驾驶。过去是工程师教车开车,现在是AI从真实世界里学开车。听起来很酷,但消费者要问一句很现实的话:学得够不够稳,遇到边角场景会不会犹豫?
05.
短板也得摊开说,别把纯视觉吹成万能
当然视觉方案也不是没有短板。摄像头遇到强逆光、暴雨、大雾、遮挡、脏污这些情况时,对算法要求非常高。低能见度、复杂路口、异形障碍物、突发加塞,都是视觉方案很大的考验。
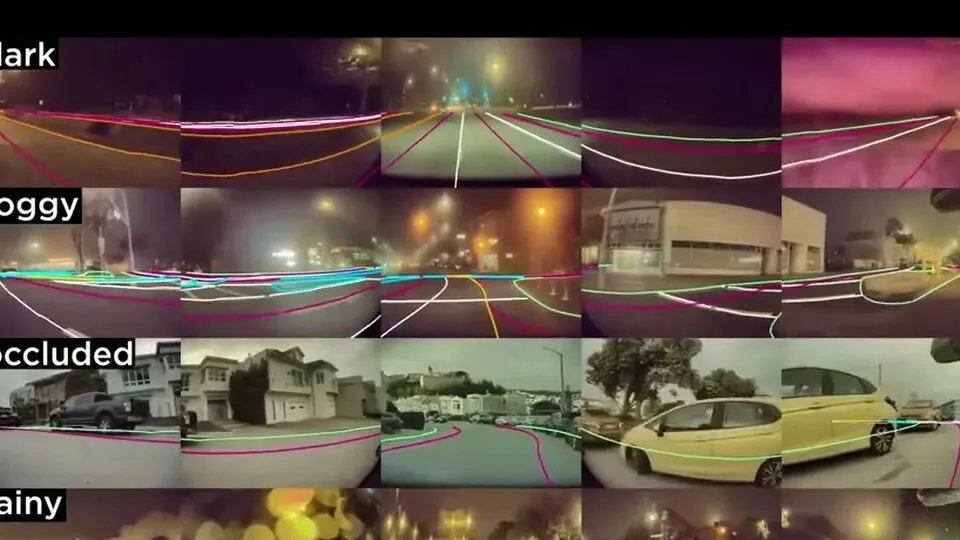 黑暗雾天遮挡雨天等环境下的视觉效果
黑暗雾天遮挡雨天等环境下的视觉效果
这就像你开车进隧道口,外面太阳很刺眼,前风挡又有点脏,人眼都会眯一下、迟疑一下,摄像头同样会遇到画面质量下降的问题。再比如大雨天跟车,水雾、反光、车灯糊成一片,系统要从这些画面里理解前方空间,压力不小。如果有人把纯视觉说成没有短板,我建议你直接把这句话打个折。不过如果你不在意恶劣天气下更多依赖自己接管,这点还能接受。
在我看来,特斯拉视觉方案的核心,不是让车简单看世界,而是让车通过AI理解世界,并且从真实道路数据里慢慢学会怎么开车。这也解释了为什么马斯克一直不愿意把特斯拉只定义成一家汽车公司,因为在他的设想里,特斯拉卖的不是一台简单的电动车,而是一台装着轮子的人工智能终端。
 银色特斯拉在城市街道行驶象征AI终端
银色特斯拉在城市街道行驶象征AI终端
买不买,我的建议也很明确:如果你买特斯拉,是看重它在辅助驾驶路线上的长期进化、喜欢简洁硬件和数据驱动思路,那纯视觉值得你认真研究;如果你特别在意硬件冗余带来的心理安全感,经常跑暴雨、大雾、强逆光路况,或者希望车在复杂环境里尽量少让你操心,那你就该多对比带激光雷达的方案。
特斯拉纯视觉不是玄学,也不是万能答案,它是一条把算法能力押得很重的路线。你会选A,激光雷达加摄像头的硬件安全感,还是选B,纯视觉加神经网络的长期潜力?我个人更倾向于:别为概念上头,先看你每天开的路有多复杂。对了,价格和权益还是以官方发布时为准,各地可能不一样。

